 2015-01-13
2015-01-13 922
922Например, в простых кинематических группах она осуществляется соединением двух соприкасающихся звеньев исполнительной группы, одним из которых является сам исполнительный орган I группы, т. е. шпиндель, стол (рис.10,а), ползун (рис.10,б)и т. д.
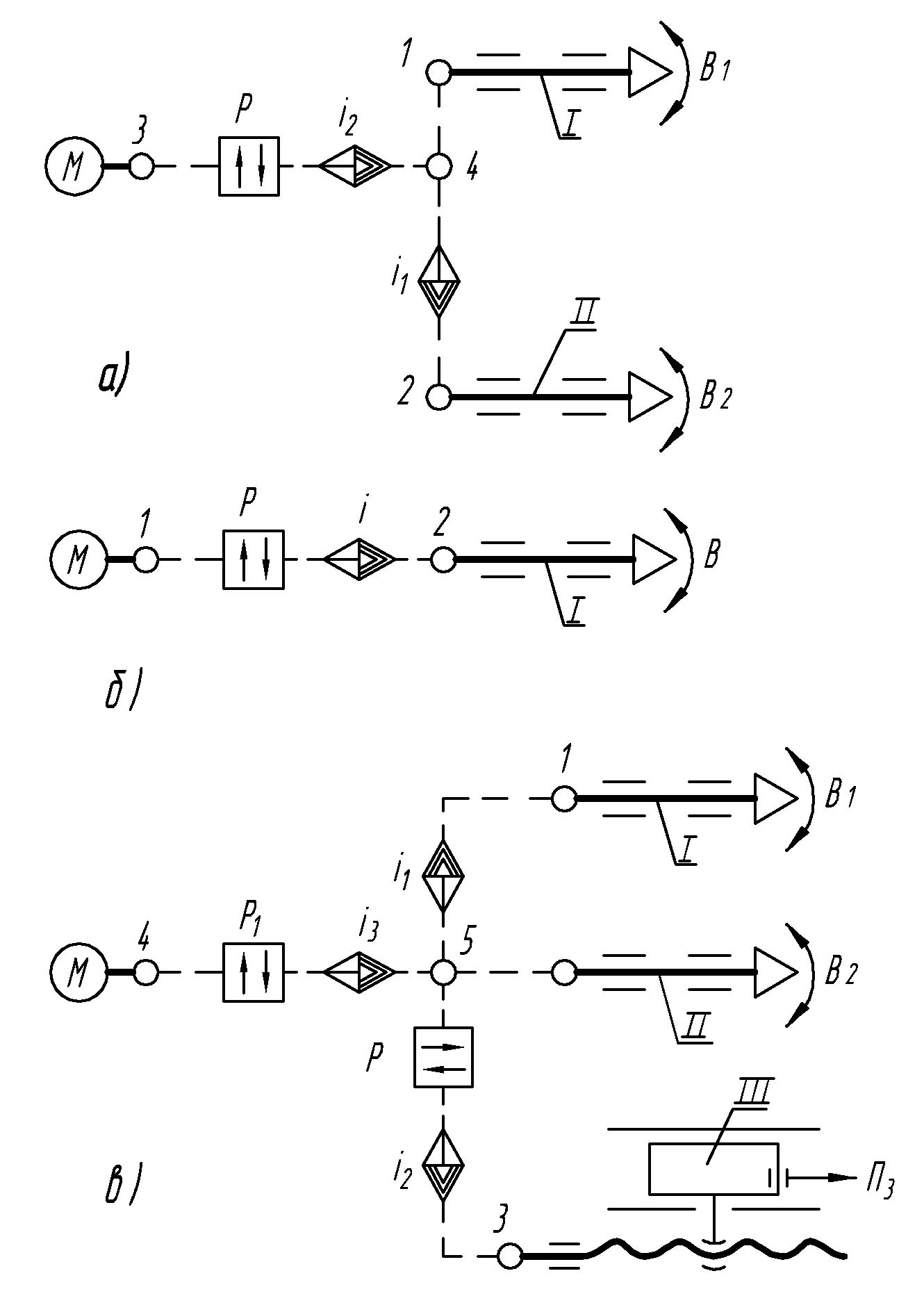
Рис. 10. Структурные схемы кинематических групп:а – сложной с двумя исполнительными органами; б – простой;
в – сложной с тремя исполнительными органами
В сложных кинематических группах с двумя и более исполнительными органами внутренняя кинематическая связь реализуется в виде кинематической цепи. Эти цепи называют внутренними или функциональными.
Под внешней кинематической связью группы понимают совокупность кинематических звеньев и их соединений, обеспечивающих количественные характеристики движения. предназначена для передачи энергии от источника движения М во внутреннюю связь группы.
На рис. 10,впоказана структурная схема кинематической группы, обеспечивающей исполнительное движение (В 1 В 2 П 3)и имеющей три исполнительных органа.
Для изменения и регулирования параметров движения в станках используют устройства, которые называются органами настройки. Органы настройки таких параметров движения, как траектория, скорость и иногда путь, на структурных схемах обозначают знаком,  – с буквой i,а орган настройки направления движения – знаком –
– с буквой i,а орган настройки направления движения – знаком –  .
.
Заштрихованная часть знака указывает на фактическое направление передачи движения через орган настройки.








