2015-02-27
2015-02-27 697
6971. Название и цель работы.
2. Устройство, принцип действия, схемы подключения потенциометрических преобразователей.
3. Основные соотношения нагруженного и ненагруженного преобразователей.
4. Таблицы с результатами измерений.
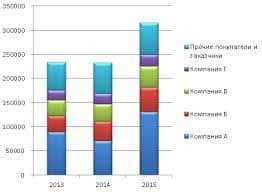
5. Графическое изображение статических характеристик.
6. Расчет предложенных для нахождения характеристик.
Контрольные вопросы
1. Объяснить устройство и принцип работы потенциометрических датчиков.
2. Назвать основные эксплуатационные характеристики потенциометров.
3. Как влияет нагрузка на статическую характеристику потенциометрического датчика?
4. К какому типу динамического звена относятся потенциометрические датчики?
Литература
1. Бохан, Н.И. Основы автоматики и микропроцессорной техники: учеб. пособие / Н.И. Бохан, Р.И. Фурунжиев. – Минск: Ураджай, 1987.
2. Бородин, И.Ф. Автоматизация технологических процессов/ И.Ф. Бородин, Ю. А. Судник. – Москва, КолосС, 2007. -344с.
Лабораторная работа № 6
Изучение прибора активного контроля ак-3м
Цель работы: изучить конструкцию и принцип действия индуктивного преобразователя перемещений и прибора АК-3М; изучить схему контроля и управления процессом обработки деталей с помощью прибора АК-3М; экспериментально определить точность автоматического контроля обработки деталей.
Назначение и конструкция прибора АК-3М
Прибор АК-3М предназначен для контроля изделий в процессе наружного шлифования методом врезания и управления процессом обработки по результатам измерений.
В комплект прибора входят два основных узла: датчик и электронный преобразующий блок.
Во время измерения датчик находится на обрабатываемой детали, соприкасаясь с ней своими элементами. Изменение размера детали вызывает перемещение измерительного элемента датчика, которое с помощью электронной схемы прибора преобразуется в электрические сигналы, служащие для управления станком и визуальным указателем хода обработки.
Датчик
Конструктивная схема датчика приведена на рисунке 6.1. Датчик содержит измерительную скобу 1 и дифференциальный индуктивный преобразователь перемещений 2. В рабочем положении датчик ориентируется на контролируемом диаметре твердосплавными вставками 3 и 4 скобы 1. Измерительный шток 5 подвешен к корпусу датчика на плоских пружинах 6, на которых он имеет возможность перемещаться вдоль своей оси. Пружина 7 прижимает шток 5 к контролируемой детали. Второй конец измерительного штока 5 несет якорь 8 индуктивного преобразователя перемещений и гайки 9 ограничивающие перемещение штока 5 относительно преобразователя 2.
Дифференциальный индуктивный преобразователь 2 содержит два ферромагнитных сердечника 10, на средних стержнях которых размещены обмотки 11. Якорь 8 перемещается в воздушном зазоре между сердечниками 10.
Преобразователь 2 подвешен на плоских пружинах 12 и прижимается пружиной 13 к регулировочному микрометрическому винту 14, установленному в корпусе датчика.
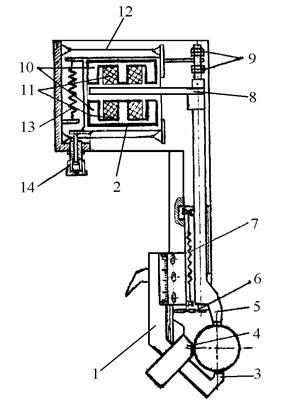
Рисунок 6.1
При изменении контролируемого диаметра в результате обработки измерительный шток 5 перемещается под действием пружины 7. Вместе со штоком перемещается якорь 8. Перемещения якоря 8 преобразуются индуктивным преобразователем в электрический сигнал, по которому срабатывает система контроля. Принцип действия дифференциального индуктивного преобразователя перемещений поясняется схемой на рисунке 6.2.
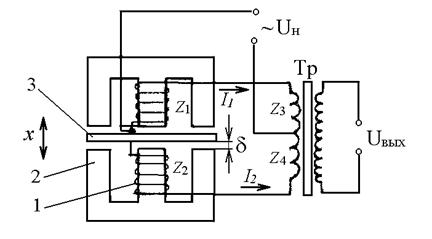
Рисунок 6.2
Обмотки Z 1 и Z 2 дифференциального индуктивного преобразователя включены в мостовую схему с первичными обмотками Z 3 и Z 4 трансформатора Т р. Мостовая схема питается переменным напряжением U п. Входным сигналом преобразователя является перемещение x якоря 3, выходным сигналом – напряжение на вторичной обмотке трансформатора U вых.
Каждая половина преобразователя представляет собой магнитную цепь, состоящую из катушки 1 со стальным сердечником 2, подвижного якоря 3 и двух воздушных зазоров δ. При питании катушки переменным напряжением ее полное сопротивление:
Z (jw) = R + JwL,
где R – активное сопротивление обмотки;
L – индуктивность обмотки;
w – круговая частота питающего напряжения.
Индуктивность обмотки в рассматриваемом преобразователе приближенно определяется по формуле:
 , Гн,
, Гн,
где R м.ст – магнитное сопротивление стальных участков цепи;
R δ – магнитное сопротивление воздушных зазоров;
W – число витков обмотки.
Для преобразования перемещений используется зависимость L от R δ.
Перемещение преобразуется в изменение магнитного сопротивления за счет изменения воздушного зазора δ. Зависимость между δ и R δ определяется формулой:

где δ – величина зазора в см;
S – площадь воздушного зазора в см
µ – магнитная проницаемость воздушного зазора.
Зависимость величины зазора δ от входного сигнала перемещения Х имеет вид
δ = δ0 + x,
где δ0 – начальный зазор между якорем и сердечником.
Зависимость величины индуктивности одной обмотки преобразователя от перемещения Х якоря выражается формулой.
При перемещениях якоря 3 (см. рисунок 6.2) индуктивность одной обмотки преобразователя увеличивается, а другой – уменьшается. Соответственно изменяются и полные сопротивления Z 1 и Z 2. Мостовая схема уравновешивается при условии
Z 1 Z 4 = Z 2 Z 3.
Токи I 1 и I 2, протекающие в противоположных ветвях моста, будут равны между собой и направлены в противофазе, вследствие чего напряжение на выходной обмотке трансформатора Т будет равно нулю. Перемещение якоря приводит к изменению величин Z 1 и Z 2 и к появлению выходного напряжения U вых, фаза которого указывает направление перемещения якоря, а модуль пропорционален величине перемещения.
Индуктивные преобразователи с переменным зазором имеют высокую чувствительность и применяются для измерения перемещений в тысячные доли миллиметра.