 2015-02-04
2015-02-04 487
487Цель работы: исследовать цифровую САУ.
Общие положения
Цифровые системы строятся на базе комплекса средств вычислительной техники, основными элементами которого являются: ЦВМ, устройства ввода и вывода.
Функции ЦВМ могут выполнять: компьютеры, DSP – цифровые сигнальные процессоры, ЦУ на жесткой логике. Первые – универсальные устройства управления; вторые – специализированные для приложений; третьи – разрабатываются для конкретных устройств.
Устройствами ввода и вывода в случае стыковки с аналоговыми сигналами являются АЦП и ЦАП, а в случае стыковки с цифровыми сигналами – порты и интерфейсы.
ЦВМ могут выполнять роль: регулятора, устройства сравнения и регулятора, корректирующего устройства или самого ОУ.
В цифровых САУ дискретизация по времени и уровню сопровождается возникновением методических погрешностей. Алгоритм работы ЦВМ описывается  –передаточной функцией.
–передаточной функцией.
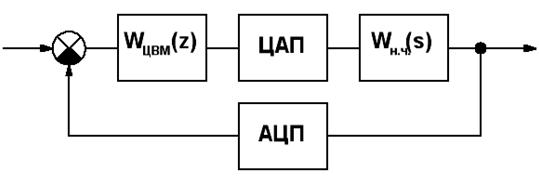
Рисунок 7.1 – Структура цифровой системы
Порядок выполнения работы
1. Структурная схема для исследования показана на рисунке 6.6.
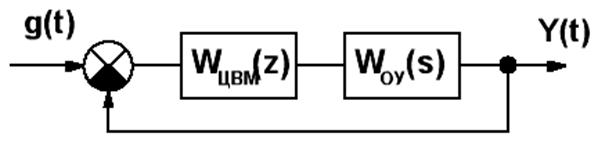
Рисунок 7.2 – Структура для исследования
Объект управления: 
 .
.
2. Выбрать пропорциональный регулятор  .
.  .
.
Записать:


3. Записать характеристическое уравнение системы и проверить при каком периоде дискретности она может быть устойчива (по корням). Промоделировать САУ при выбранном  .
.
4. Конвертировать  при выбранном и промоделировать систему.
при выбранном и промоделировать систему.
5. Для заданного ОУ выберем ПД-регулятор:
 ;
;  ;
;  и
и  – параметры настройки.
– параметры настройки.
6. Записать  .
.
7. Смоделировать САУ при выбранном .
8. Задать параметры регулятора  ;
;  ;
;  .
.  .
.
9. Сделать выводы.
Приложение – Таблица z-преобразований
| F (p) | f (t) | F (z) |

| 
| 
|

| 
| 1 или 
|

| 
| 
|

| 
| 
|

| 
| 
|

| 
| 
|

| 
| 
|

| 
| 
|

| 
| 
|

| 
| 
|

| 
| 
|

| 
| 
|

| 
| 
|

| 
| 
|
Литература
1. Теория автоматического управления: учебник для вузов / Л. С. Гольдфарб [и др.]; под ред. А. В. Нетушила. – 2-е изд. перераб. и доп. – Москва: Высшая школа, 1983. – 432 с.
2. Автоматическое регулирование. Теория и элементы систем: учебник для вузов / под ред. Н. Н. Иващенко – 3-е изд. – Москва: Машиностроение, 1973. – 606 с.
3. Анхимюк, В. Л. Теория автоматического управления: учеб. пособие для вузов / В. Л. Анхимюк, О. Ф. Опейко, Н. Н. Михеев – Минск: Дизайн ПРО, 2000. – 352 с.
4. Бесекерский, В. А., Теория автоматического регулирования / В. А. Бесекерский, Е. П. Попов. изд. 3-е, испр. – Москва: Наука, 1975. – 768 с
5. Куропаткин, А. В. Теория автоматического управления: учеб. пособие для электротехн. спец. вузов / А. В. Куропаткин; под ред. Д. В. Васильева. – Москва: Высшая школа, 1973. – 528 с.
6. Справочное пособие по теории систем автоматического регулирования и управления / под общ. ред. Е. А. Санковского. – Минск: Высшая школа, 1973. – 583 с.
7. Топчеев, Ю. И. Атлас для проектирования систем автоматического регулирования: учеб. пособие для вузов / Ю. И. Топчеев. – Москва: Машиностроение, 1989. – 752 с.
8. Микропроцессорные автоматические системы регулирования. Основы теории и элементы: учеб. пособие / В. В. Солодовников [и др.]; под ред. В. В. Солодовникова. – Москва: Высшая школа, 1991. – 256 с.
9. Руководство по проектированию систем автоматического управления: учеб. пособие для студентов специальности «Автоматика и теле- механика» / под ред. В. А. Бесекерского. – Москва: Высшая школа, 1983. – 296 с.
10. Кулаков, Г. Е. Анализ и синтез систем автоматического регулирования / Г. Е. Кулаков. – Минск: УП Технопринт, 2003. – 125 с.
11. Бесекерский, В. А. Цифровые системы управления / В. А. Бесекерский. – Москва: Наука, 1976. – 320 с.
12. Микропроцессорные системы автоматического управления / под ред. В. А. Бесекерского. – Москва: Машиностроение, 1988. – 365 с.
13. Лазарева, Т. Я. Основы теории автоматического управления: учеб. пособие / Т. Я. Лазарева, Ю. Ф. Мартемьянов. – Тамбов: Изд-во Тамбовского государственного технологического университета, 2003. – 308 с.
14. Андриевский, Б. Р. Избранные главы теории автоматического управления с примерами на языке Matlab / Б. Р. Андриевский, А. Л. Фрадков. – Санкт-Петербург: Наука, 2000. – 475 с.
15. Клиначев, Н. В. Теория систем автоматического регулирования. Учебно-методический комплекс, 2005. Электронный ресурс.
16. Бажанов, В. USWO – новый способ формирования управления для замкнутых систем автоматического регулирования / В. Бажанов // Современные технологии автоматизации. – 1998. – № 4. – С. 28 – 32.
17. Денисенко, В. ПИД-регуляторы: принципы построения и модификации / В. Денисенко // Современные технологии автоматизации. – 2006. – № 4. – С. 66 – 74; 2007. – № 1. – С. 78 – 86.








