 2015-02-04
2015-02-04 783
783Цель работы: исследовать влияние нелинейного элемента и его местоположения на динамику системы и ее устойчивость.
Общие положения
В системах автоматического управления НЭ присутствуют в блоке управления исполнительным механизмом (ограничения по току двигателя, зоны нечувствительности в механических передачах, люфты и т.д.). Поведение нелинейных систем зависит от начального состояния и величины внешних воздействий (т.к. меняется сигнал на входе НЭ – см. л.р. №3). Устойчивость нелинейной САУ, как и линейной оценивают при свободном движении, а точность – при вынужденном.
Наличие зоны неоднозначности в одноконтурной системе приводит к установлению режима автоколебаний, амплитуда которых зависит от ширины зоны неоднозначности и коэффициента преобразования линейной части. (Наличие в системе запаздывания ведет к увеличению амплитуды автоколебаний). Зона нечувствительности является демпфирующим фактором и чем она шире, тем быстрее затухают переходные процессы, но она создает ошибку, т.к. сигнал на выходе системы устанавливается в зоне нечувствительности. Наличие в системе усилителя с ограничением приводит к тому, что при малых отклонениях система ведет себя как линейная, а при больших отклонениях как релейная (с идеальной двухпозиционной характеристикой). Эти особенности поведения систем должны быть осмыслены при исследовании.
Порядок выполнения лабораторной работы
1. Собрать схему, показанную на рисунке 4.1.
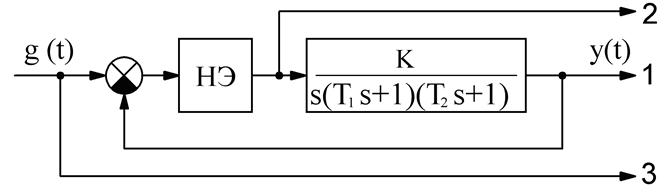
Рисунок 4.1 – Схема моделирования
Сигнал в точке 2 характеризует работу НЭ и по нему можно судить о поведении системы.
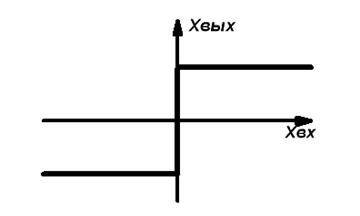
a) НЭ – идеальное двухпозиционное реле
б) НЭ – гистерезисное реле
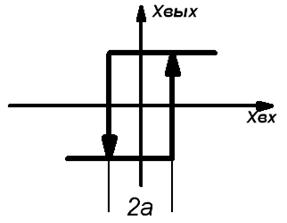
 задается преподавателем
задается преподавателем
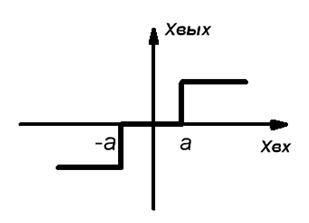
в) НЭ – трехпозиционное реле
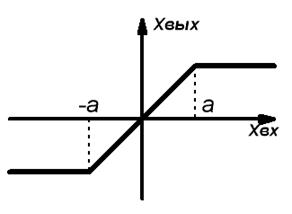
г) НЭ – усилитель

2. Исследовать свободное движение в системе:
 при различных нелинейных элементах. Постоянные времени задаются преподавателем. Для оценки влияния коэффициента усиления на поведение системы изменять
при различных нелинейных элементах. Постоянные времени задаются преподавателем. Для оценки влияния коэффициента усиления на поведение системы изменять  в 10 раз.
в 10 раз.
3. Исследовать вынужденное движение при  ;
;  , меняя
, меняя  кратно 10, оценить точность, влияние зоны нечувствительности.
кратно 10, оценить точность, влияние зоны нечувствительности.
4. Собрать схему на рисунке 4.2.
Эта схема позволяет оценить влияние местоположения НЭ. Сигнал в точке 4 – то значение параметров автоколебаний, которое получается при аналитическом расчете, в точке 3 – характеризует НЭ и вид сигнала на входе системы.
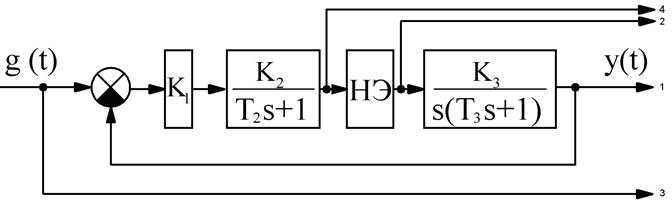
Рисунок 4.2 – Схема моделирования
5. Исследовать свободное движение при различных НЭ, изменяя коэффициент усиления части системы перед входом НЭ кратно 10.  ;
;  .
.
6. Исследовать вынужденное движение.  ,
,  .
.
Содержание отчёта.
1. Схемы исследования.
2. Результаты исследования – указать на графиках  ,
,  и их значения. Сравнить амплитуды на входе НЭ и выходе системы. Амплитуда на входе НЭ получается из расчета системы методом гармонического баланса, а на выходе системы может быть пересчитана, умножив
и их значения. Сравнить амплитуды на входе НЭ и выходе системы. Амплитуда на входе НЭ получается из расчета системы методом гармонического баланса, а на выходе системы может быть пересчитана, умножив  , где
, где  – модуль частотной характеристики элементов, стоящих после НЭ на частоте автоколебаний.
– модуль частотной характеристики элементов, стоящих после НЭ на частоте автоколебаний.
3. Оценить влияние  на и , зон неоднозначности и нечувствительности.
на и , зон неоднозначности и нечувствительности.
4. Оценить наличие ошибки в системе.
5. Оценить влияние местоположения НЭ на динамику системы.








