 2015-02-04
2015-02-04 567
567Цель работы: исследовать возможность устранения режимов автоколебаний в нелинейных системах.
Общие положения
Для устранения режима автоколебаний или существенного уменьшения их амплитуды в нелинейную систему чаще всего вводят КУ обратной связи, при последовательной коррекции используют нелинейные КУ. Коррекция даже с помощью жесткой обратной связи, охватывающей НЭ, позволяет достичь большего эффекта, чем последовательная коррекция. Поэтому в большинстве САУ вводят ОС по положению регулирующего органа (угла поворота исполнительного механизма) т.к. именно в этом блоке присутствуют нелинейности.
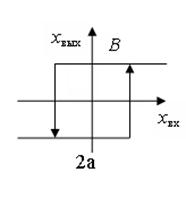
Сложнее всего устранить режим автоколебаний в системе при гистерезисной нелинейности (с зоной неоднозначности). Для этого вводят инерционные гибкие обратные связи, параметры которых либо рассчитывают, либо подбирают при моделировании системы.
Порядок выполнения лабораторной работы
1. Собрать схему в программе VisSim:
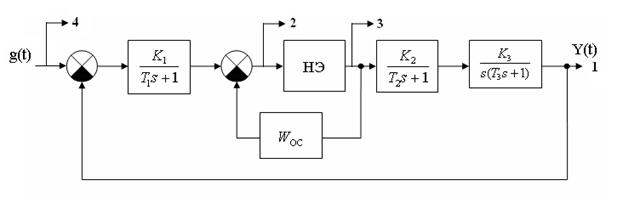
Рисунок 5.1 – Схема моделирования
НЭ:
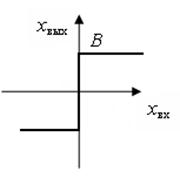 а) б) в)
а) б) в)
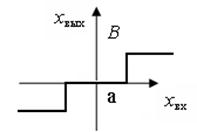
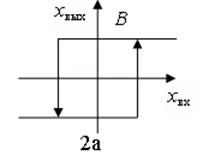
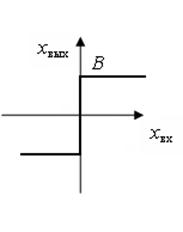
Рисунок 5.2 – Исследуемые нелинейные элементы
2. Исследовать работу системы без КУ при  .
.
3. В структуре, показанной на рисунке 5.1 используют либо инерционную ОС ( ) либо гибкие ОС (
) либо гибкие ОС ( или
или  ), как правило с
), как правило с  .
.
При исследовании системы необходимо вывести на экран выходной сигнал в точке 1, сигнал со входа НЭ – точка 2, с выхода НЭ – точка 3, а также входной сигнал. Параметры возможных автоколебаний в точке 2 должны совпадать с аналитическим расчетом, а в точке 1 –  .
.
Сигнал в точке 3 характеризует работу нелинейного элемента, если он переходит в режим работы частых переключений, то на выходе системы колебания либо затухают, либо их нет и процесс близок к монотонному. Цель исследования – найти оптимальные параметры корректирующего устройства ОС. Сравнить влияние инерционной ОС и гибкой при том же  .
.
4. Для структуры, показанной на рисунке 5.3 можно использовать и жесткую глубокую ОС (т.е.  ,
,  ), а также инерционную ОС с . Проведите сравнение этих типов коррекции при одном и том же
), а также инерционную ОС с . Проведите сравнение этих типов коррекции при одном и том же  .
.
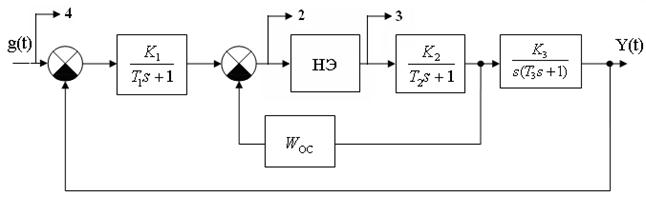
Рисунок 5.3 – Схема моделирования
 НЭ:
НЭ:
 а) б) в)
а) б) в)
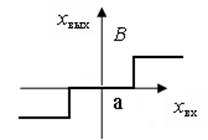
Рисунок 5.4 – Исследуемые нелинейные элементы
5. Исследовать вынужденное движение g(t)=10·1(t) ; .
6. Выбрать оптимальные КУ и их параметры.
Содержание отчёта.
1. Схемы исследования.
2. Результаты исследования – указать на графиках  ,
,  и их значения. Проверить равенство
и их значения. Проверить равенство  .
.
3. Построить зависимости ( ) и (
) и ( ), найти и , которые устраняют режим автоколебаний.
), найти и , которые устраняют режим автоколебаний.
4. Сделать рекомендации по выбору структуры и параметров КУ ОС.








