 2015-02-14
2015-02-14 7759
7759Механические приводы уравновешивающе-нажимных устройств различают: по принципу передачи к нажимным устройствам, по конструкции редукторов, по количеству применяемых моторов, по способу переключения на совместную и обособленную работу моторов.
а) По принципу передачи к нажимным устройствам. Существуют передачи: цилиндрические (фиг. 326), конические (фиг. 327, а) и червячные (фиг. 327, б). Первые встречаются в современных станах очень -редко, вторые — чаще, третьи весьма часто.
б) По конструкции редукторов скорости. Эти конструкции весьма разнообразны в отношении характера передач (конические, цилиндрические, червячные), количества ступеней (пар шестерен) и величины передаточных чисел. Конические передачи редукторов встречаются редко, червячные значительно чаще, цилиндрические очень часто.
в) По количеству применяемых моторов. Существуют приводы с одним, двумя или несколькими моторами.
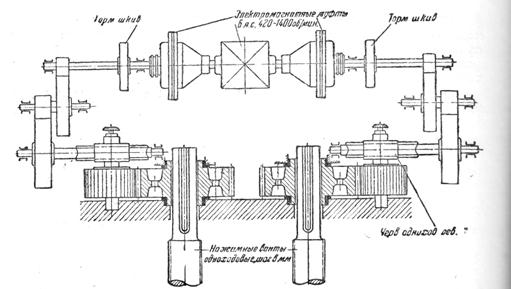
Фиг. 326. Механизированный привод с цилиндрическими передачами к нажимным винтам
Фиг. 327. Механизированный привод с коническими (а) и червячными (б) передачами к нажимным винтам
Фиг. 328. Кинематическая схема привода уравновешивающе-нажимного механизма клети бесслитковой прокатки: 1 — ведущая шестерня; 2 и 3 — цилиндрические зубчатые колеса; 4 и 6 — червячные винты; 5 и 7 — червячные колеса; 8 — расцепная муфта; 9 — моторная муфта; 10 — шарнирный шпиндель; 11 —тормоз; 12 — мотор
В качестве примера приводим схему привода уравновешивающе-нажимного устройства стана бесслитковой прокатки (фиг. 328), в котором вращение обоих нажимных винтов осуществляется от одного мотора. Кроме червячных пар 6—7, непосредственно связанных с нажимными винтами в приводе, имеются еще червячная пара 4—5 и одна цилиндрическая передача из трех шестерен 1—2—3, расположенная у мотора.
Конечное выключение для нажимного устройства производится в одну сторону (при разведении валков), управление перестановкой левого валка кнопочное, по циферблату, регулировка каждого винта в отдельности осуществляется при помощи муфты «Пулл» с ручным или электрическим управлением.
Мощность мотора привода 8,1 л. с., число оборотов в минуту 1000. Смазка привода циркуляционная от отдельного насоса производительностью 32 л/мин, при давлении 13 кг/см  . Мощность насоса 1,3 л. с. при числе оборотов в минуту 950.
. Мощность насоса 1,3 л. с. при числе оборотов в минуту 950.
Привод уравновешивающе-нажимных устройств с двумя моторами распространен значительно больше, чем привод с одним мотором и встречается преимущественно в крупносортных и обжимных станах.
Применение в приводах вместо одного двух моторов вызвано стремлением уменьшить маховой момент якоря электродвигателя, увеличить скорость подъема по отношению к скорости опускания верхнего валка (при подъеме — последовательное включение, при опускании — параллельное) и, наконец, иметь резерв на случай выхода одного из электродвигателей из строя.
При кратковременном режиме работы моторов при установке валков привод работает главным образом в период пуска и торможения. Поэтому уменьшение махового момента, достигаемое установкой двух моторов, имеет чрезвычайно важное значение.
Переключение двигателей на параллельное и последовательное соединение осуществляется автоматически; при последовательном включении напряжение тока, подводимого к двигателю, уменьшается вдвое, соответственно чему уменьшается и число оборотов.
Схемы приводов при двух моторах весьма разнообразны.
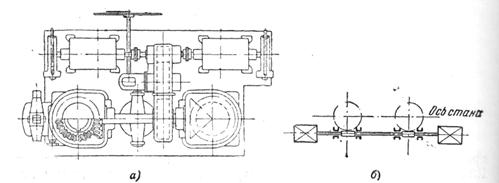
Наиболее упрощенной является схема привода уравновешивающе-нажимного устройства блюминга Кузнецкого завода (фиг. 327, б), состоящая из двух червячных пар, червячные колеса которых сидят на нажимных винтах, червяки — на общем валу, Более сложна схема привода (фиг. 329, а) на блюминге 1150 мм Магнитогорского завода. В нее входят две пары червячных (у нажимных винтов) и две пары конических передач.
В первом советском блюминге 1150 мм установлен привод, имеющий две пары червячных (у нажимных винтов) и две пары цилиндрических передач. Подобные схемы часто встречаются и у других станов (средне- и толстолистовых, крупносортных и т. д.).
Значительно реже можно встретить схему привода (фиг. 329, б) с двумя парами конических передач (у нажимных винтов) и одной цилиндрической или с двумя парами червячных (у нажимных винтов) и двумя двухступенчатыми цилиндрическими (фиг. 329, в). Последняя схема применяется в станах кварто холодной прокатки.
г) По способу переключения на совместную и обособленную работу моторов. Существуют приводы с обыкновенными расцепными муфтами, со специальными зубчатыми редукторами переключения, с электромагнитными муфтами и др.
Обыкновенные расцепные, как и электромагнитные, муфты несложны (см. ниже в главе X). Здесь остановимся лишь на специальных зубчатых редукторах переключения, представляющих с механической точки зрения большой интерес.
Основной недостаток уравновешивания при помощи пружин, находящихся под большим давлением, заключается в невозможности регулировки их в случае необходимости смены предохранительных стаканов и подушек верхнего валка. Поэтому в некоторых уравновешивающе-нажимных агрегатах прибегают к независимому от нажимных устройств передвижению подушек при помощи специальных приспособлении.
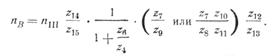
Такое независимое передвижение подушек может быть достигнуто при наличии самостоятельных приводов к нажимным и обратным (уравновешивающим) винтам, что осуществлено на обжимной клети дуо рельсобалочного стана 900 мм Кузнецкого завода (фиг. 330).
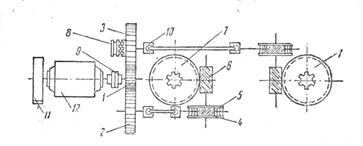
Основное отличие этого механизма от рассмотренных выше заключается в применении четырех червячных передач. На каждой стороне рабочей клети верхнее червячное колесо 1 неподвижно посажено на полый шпиндель 2, нижнее червячное колесо 3 на квадратную часть нажимного винта 4, чем и достигается независимое вращение шпинделя и нажимного винта, связанных с отдельными червячными передачами.
Для вращения каждой червячной пары установлены отдельные электромоторы, расположенные сбоку на кронштейнах. Оба продольных вала 6 соединены между собой цилиндрической зубчатой передачей 7.
Каждый продольный вал 1 (фиг. 331) разделен на две части, которые несут на себе отдельные червяки 2 и связаны в местах соединения с зубчатыми муфтами 3. В положении, показанном на чертеже, все четыре червяка вращаются с одинаковой скоростью. При перемещении муфты, соединяющей два верхних червяка, на каждом валу, на одну ступень влево, оба продольных вала разъединяются, и промежуточная зубчатка вращается вхолостую (независимое движение нажимного винта или траверсы). При перемещении верхней муфты еще на одну ступень влево разъединяется верхний вал и получается независимое перемещение траверсы у каждой подушки. При выключении нижней муфты разъединяется нижний вал и
получается независимое вращение нажимных винтов.
Недостаток этого устройства — сложность конструкции и трудность замены быстро изнашивающихся деталей.
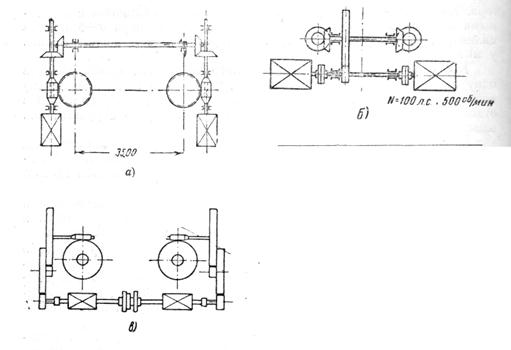
Фиг. 329. Приводы уравновешивающе-нажимных устройств: а—с двумя парами червячных (у нажимных винтов) и коническими передачами (блюминг Магнитогорского завода); б — с двумя парами конических передач (у нажимных винтов) и одной парой цилиндрической; в — с двумя парами червячных передач (у нажимных винтов) и двумя двухступенчатыми цилиндрическими редукторами
Фиг. 330. Привод с двумя червяками у каждого нажимного винта: 1 — верхнее червячное колесо; 2 — полый шпиндель; 3 — нижнее червячное колесо; 4 — квадратная часть нажимного винта; 5 — моторы: 6 — продольные валы: 7 — редуктор переключения
Фиг 331. Механизм для переключения на независимую работу нажимных винтов при наличии двух моторов и четырех червячных передач: 1 — продольные валы; 2— червяки; 3 — муфты переключения
3. Механический привод с планетарными передачами
(механическое регулирование скоростей)
В случае необходимости в получении большого диапазона скоростей установки верхнего валка и независимой работы нажимных винтов в уравновешивающе-нажимных устройствах применяются приводы с планетарными механизмами (соединение нескольких различных передач, где главной является планетарная) или даже дифференциалами (при передаче одному валу суммы или разности скоростей от двух независимых двигателей).
Планетарные механизмы бывают с цилиндрическими и коническими колесами, причем последние применяются значительно чаще.
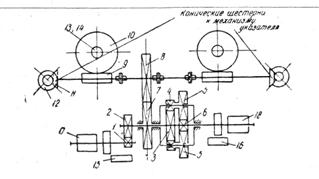
а) Дифференциал с цилиндрическими колесами (шестернями) применяется в приводе (фиг. 332) уравновешивающе-нажимного устройства стана трио Лаута.
Фиг. 332. Кинематическая схема привода уравновешивающе-нажимного механизма клети трио Лаута с дифференциалом, имеющим цилиндрические колеса: 1 — солнечное колесо (ведущая шестерня); 2 — сателлиты (обкатные шестерни); 3 — солнечное колесо левой стороны привода; 4 — сателлиты второй пары; 5, 6 — цилиндрические колеса обыкновенной передачи; 7,8— цилиндрические колеса передачи от вала нажимных винтов
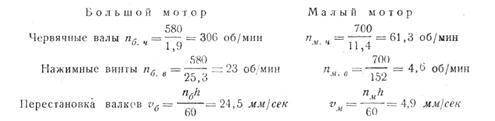
Установленный между двумя электромоторами дифференциал имеет солнечное колесо 1, сателлиты 2 (правая сторона), а также солнечное колесо 3 и сателлиты 4 (левая сторона), причем изменение скоростей достигается притормаживанием одного из электромоторов при помощи специальных тормозов. При нормальном положении, когда работают оба мотора, имеется одна группа скоростей, при затормаживании левой стороны — другая, правой — третья, причем левый тормоз позволяет иметь диапазон чисел оборотов 500  160, правый 400 110. Таким образом, благодаря применению дифференциала, можно получить широкий диапазон скоростей при вращении нажимных винтов.
160, правый 400 110. Таким образом, благодаря применению дифференциала, можно получить широкий диапазон скоростей при вращении нажимных винтов.
Зная число зубьев шестерен и их радиусы, можно определить передаточные числа при работе обоих моторов.

При работе малого (правого) мотора передаточное число дифференциала
 (364)
(364)
при работе большого (левого) мотора
 (365)
(365)
Общее передаточное число привода от малого мотора
 (366)
(366)
и от большого
 (367)
(367)
Зная передаточное число от малого мотора на червячный вал  = 11,4 и от большого мотора, равное
= 11,4 и от большого мотора, равное  , можно определить числа оборотов червячных валов и нажимных винтов и скорости перестановки валка при помощи малого и большого моторов.
, можно определить числа оборотов червячных валов и нажимных винтов и скорости перестановки валка при помощи малого и большого моторов.
Зная передаточные числа для привода от большого или от малого мотора, легко подсчитать их и при торможении в зависимости от степени последнего.
Аналогичная схема привода с дифференциалом из цилиндрических колес для стана трио Лаута 750  550 750 представлена на фиг. 333а, причем на этой схеме дополнительно показаны две пары конических передач для привода механизма указателя, кроме того вместо тормозов применены электромагниты.
550 750 представлена на фиг. 333а, причем на этой схеме дополнительно показаны две пары конических передач для привода механизма указателя, кроме того вместо тормозов применены электромагниты.
На фиг. 333б представлена схема механизма указателя, состоящего из трех пар конических, трех пар цилиндрических и одной винтовой передач. Передаточные числа конических пар шестерен ( —1:3,33;
—1:3,33;  —1:1;
—1:1;  —1:2,53); цилиндрических ( —1,6:1; II—1:2,46; III—1:1,2). Общее передаточное число после второй конической пары (после 4-й шестерни) — 2,08; после второй цилиндрической пары (после 10-й шестерни) — 7,48.
—1:2,53); цилиндрических ( —1,6:1; II—1:2,46; III—1:1,2). Общее передаточное число после второй конической пары (после 4-й шестерни) — 2,08; после второй цилиндрической пары (после 10-й шестерни) — 7,48.
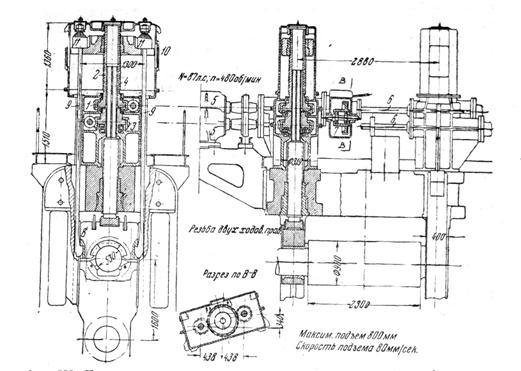
б) Дифференциал с коническими шестернями, изображенный на фиг. 334, а, применен в приводе уравновешивающе-нажимного механизма клети трио Лаута среднелистового стана  == 850/550/850 мм,
== 850/550/850 мм,  = 2150 мм, установленного на Кузнецком заводе. Дифференциал 1 установлен между двумя электромоторами 2 и 3 и валом 4, связывающим нажимные винты 5, 6.
= 2150 мм, установленного на Кузнецком заводе. Дифференциал 1 установлен между двумя электромоторами 2 и 3 и валом 4, связывающим нажимные винты 5, 6.
Цилиндрическая шестерня 7, связанная с рамкой дифференциала, находится в зацеплении с шестерней 8, насаженной на вал 4.
Солнечное колесо 9 дифференциала соединено при помощи муфты посредственно с большим мотором 2 (N = 87 л. с., п =480 об/мин). Второе солнечное колесо 10 — через редуктор 11 соединено с малым мотором 3 (N = 30 л. с., п = 720 об/мин).
Фиг. 333 а. Кинематическая схема привода уравновешивающе-нажимного механизма с дифференциалом из цилиндрических колес для стана трио Лаута Ø 750 550 750; 1 и 2 —обыкновенные цилиндрические шестерни; 3 и 6 — солнечные колеса; 4 и 5— сателлиты; 7 и 8 — главные цилиндрические шестерни между двумя валами; 9 и 10 — червяк и червячное колесо нажимного винта; 11 и 12 — конические шестерни к приводу механизма указателя; 13 и 14 — нажимной и уравновешивающий винт; 15 и 16 — электромагниты; 17 и 18 — моторы
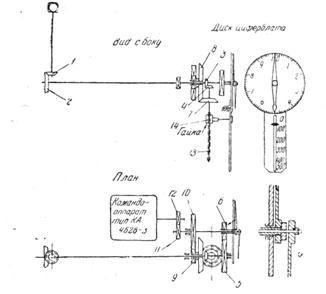
Фиг. 333 б. Схема механизма указателя уравновешивающе-нажимного устройства: 1, 2 — первая пара конических шестерен, соединяющая привод нажимного механизма с механизмом указателя; 3, 4 — вторая пара конических шестерен; 7, 8 — третья пара конических шестерен редуктора механизма; 6 — первая пара цилиндрических шестерен, соединяющая главный вал с валом первой стрелки циферблата указателя; 9, 10 - - вторая цилиндрическая пара шестерен, связывающая главный вал с валом 2-й стрелки циферблата; 11, 12 — третья цилиндрическая пара шестерен, связывающая вал циферблата с валом командо-аппарата; 13, 14 — винт и гайка, соединенные со шкалой, несущей деления высоты подъема
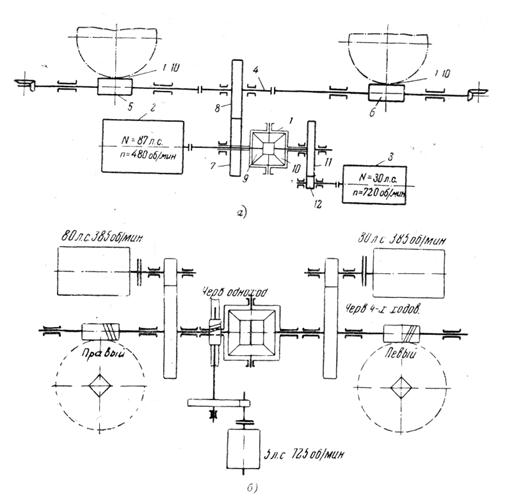
Фиг. 334. Привод с дифференциалом, имеющим конические колеса (а) и с дифференциалом, рамка которого вращается от вспомогательного мотора (б)
Число оборотов на валу 4 при работе только одного (большого) мотора 2:

при работе только одного малого мотора 3:

При вращении обоих моторов в разные стороны (шестерен 9 и 10 в одну сторону)
 (368)
(368)
при вращении валов обоих моторов в одном направлении
 (369)
(369)
Комбинируя включение большого и малого моторов, можно получить различные скорости передвижения верхнего валка.
Схема привода уравновешивающе-нажимного устройства (фиг. 334, б) клети кварто  585/1000 мм, = 2130 мм среднелистового стана одного из американских заводов имеет дифференциал с коническими колесами, установленный на валах нажимных винтов. Рамка дифференциала на этих валах вращается от вспомогательного электромотора в 5 л, с. посредством цилиндрической и червячной передачи, колесо которой наезжено на рамку дифференциала.
585/1000 мм, = 2130 мм среднелистового стана одного из американских заводов имеет дифференциал с коническими колесами, установленный на валах нажимных винтов. Рамка дифференциала на этих валах вращается от вспомогательного электромотора в 5 л, с. посредством цилиндрической и червячной передачи, колесо которой наезжено на рамку дифференциала.
Нажимные винты приводятся каждый сериесным электромотором мощностью в 80 л. с. при п — 385 об/мин посредством цилиндрической и червячной передач.
При нормальной работе электромоторов последние вращаются одновременно, но только в разные стороны (червяки нажимных винтов имеют один правую, другой— левую нарезку), рамка дифференциала в это время остается неподвижной. Наличие солнечных колес дифференциала обеспечивает вращение обоим червякам с одинаковым числом оборотов но в разные, стороны, чем и обеспечивается параллельное перемещение верхнего валка.
При выравнивании валков включается вспомогательный электродвигатель, вращающий рамку дифференциала, причем вследствие наклона витков, червяка в разные стороны, создается и разность в скоростях Движения нажимных винтов; в случае же, когда главные электромоторы выключаются, движение нажимных винтов происходит в разных направлениях (один опускается, другой поднимается). Из сказанного следует, что при данной схеме выравнивание положения верхнего валка можно производить как при включенных, так и при выключенных электромоторах. При необходимости отрегулирования одного из нажимных винтов, у другого винта притормаживается главный электромотор и червяк будет вращаться со скоростью, превосходящей рамку дифференциала в два раза.
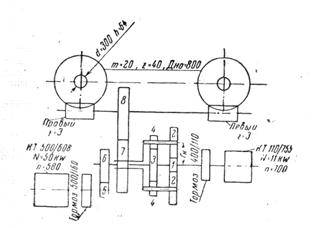
Более сложный привод уравновешивающе-нажимного устройства с планетарным механизмом универсального стана изображен [160] на фиг. 335.
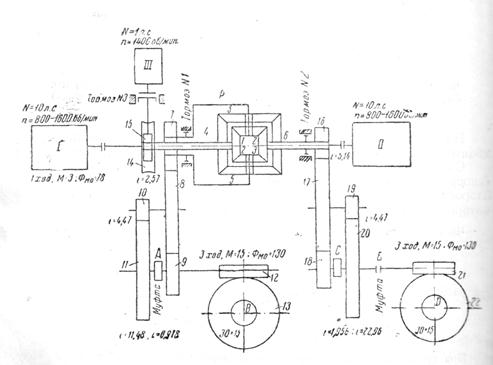
Фиг. 335. Привод с дифференциалом для уравновешивающе-нажимного
устройств универсального стана
От мотора (N = 10 л. с., п = 800/1600 об/мин) получает вращение солнечное колесо 1. Сателлиты 2 и 5, сидящие на общей втулке, приводят во вращение водило Р, соединенное с шестерней 7, которая через обыкновенные передачи 8—9 и 10—11, переключаемые муфтой А, вращает червяк 12 и червячное колесо 13, связанное с левым ведомым звеном 5. У второго дифференциала солнечная шестерня 4 связана с червячным колесом 14 и через червяк 15 с односкоростным мотором (N=1 л. с., п =1400 об/мин). С двухскоростным мотором ( = 10 л. с., п = 800/1600 об/мин) связана солнечная шестерня 3, а шестерня 6 связана с шестерней 16, от которой через передачи 17— 18 и 19—20, переключаемые муфтой С и червячную передачу 21— 22, приводится в движение правое ведомое звено . Муфтой Е вал червяка 21 может быть отключен от вала шестерен 18 и 20.
= 10 л. с., п = 800/1600 об/мин) связана солнечная шестерня 3, а шестерня 6 связана с шестерней 16, от которой через передачи 17— 18 и 19—20, переключаемые муфтой С и червячную передачу 21— 22, приводится в движение правое ведомое звено . Муфтой Е вал червяка 21 может быть отключен от вала шестерен 18 и 20.
Возможные варианты получения скоростей левого В и правого звеньев приведены ниже.
1. Работает мотор , моторы и выключены, ведомое звено — В, тормоз № 2 затянут:
 (370)
(370)
Таким образом в этом случае мы имеем две скорости.
2. Работает мотор , мотор заторможен, мотор отключен; тормоз № 2 свободен, муфта Е выключена:
 (371)
(371)
В этом случае получаем четыре скорости.
3. Работают моторы и , тормоз № 2 отпущен, муфта Е выключена:
 (372)
(372)
Получаем также четыре скорости.
4. Моторы I и II работают с разными числами оборотов:
 (373)
(373)
Опять получаем четыре скорости.
5. Моторы I и работают, мотор II выключен, тормоз № 2 свободен, муфта Е выключена:

В этом случае получаем восемь скоростей.
6. Работают моторы I и II, тормоз № 2 затянут:
 (375)
(375)
Получаем четыре скорости.
Таким образом ведомое звено В может иметь 26 различных скоростей (из них 12 повторяющихся) и 4 положения, когда  = 0.
= 0.
Правое звено может иметь 30 различных скоростей (из них 12 повторяющихся) и 4 нулевых положения.
Из числа рассмотренных ранее последняя схема привода дает наиболее широкий диапазон скоростей уравновешивающе-нажимного устройства.
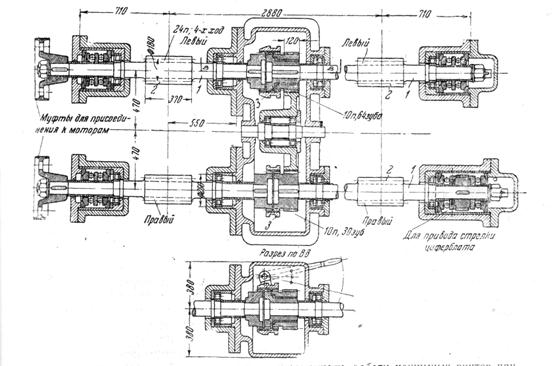
Весьма большой интерес представляет привод уравновешивающе-нажимного устройства универсальной клети (фиг. 336а), имеющей смесь различных комбинаций валков (дуо блюминг, листовое, тонколистовое нереверсивное: трио блюминг, Лаута. сортовое; кварто), с предельными диаметрами рабочих валков 210—400 мм. Привод этого устройства состоит из 2 конических дифференциалов; 2 цилиндрических передач; 2 червячных передач и 2 конических передач. При 17 шестернях (два сателита) и разных количествах зубьев, имеется большой диапазон скоростей, вполне удовлетворяющий различным комбинациям валков этой клети.
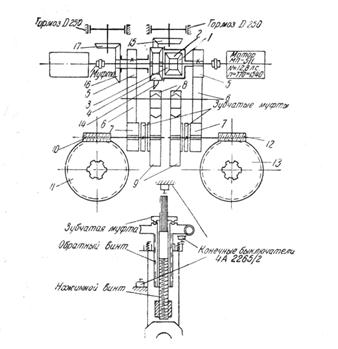
Фиг. ЗЗ6а. Схема привода универсальной клети, имеющей семь комбинаций валков: 1 и 3 — солнечные колеса (боковые шестерни); 2 и 4 — сателлиты; 5, 6,7 — шестерни цилиндрических передач; 8 и 9 — шестерни центральных цилиндрических передач; 10 и 12 — червяки; 11 и 13 — червячные колеса; 14 и 15 — шестерни конической передачи; 16 и 17 — шестерни второй конической передачи
Для регулирования скорости установки валков служит, как и в предыдущих схемах приводов, конический дифференциал, расположенный между двумя моторами.
Перемещение нажимных винтов в зависимости от комбинации типа клети производится со скоростью: у блюминга дуо и блюминга трио—15 мм/сек; у сортового 0,1—0,5 мм/сек; у трио Лаута и листового дуо 1—4 мм/сек; у тонко листового дуо 0,02—0,5 мм/сек; у кварто 0,01—0,1 мм /сек.
Раздельная регулировка каждого из нажимных винтов осуществляется с помощью дифференциала с коническими шестернями. Наличие тормозов дает возможность притормаживания одной из сторон привода.
При больших усилиях, передающихся нажимными винтами (кварто), включал дополнительная зубчатая передача помощью зубчатых муфт.
Независимый от винтов ход подушек достигается путем расцепления обратных винтов с нажимными. Управление перестановкой верхнего валка — ручное. 3азор устанавливается по стрелкам указателя, градуированного на три шкалы (миллиметры, десятки, сотни). Конечное выключение нажимных винтов предусмотрено в одну сторону—при подъеме; для обратных — в обе стороны (подъем, опускание).
На данной схеме предусмотрен переход на автоматическое управление нажимными винтами помощью сельсин-аппаратов.
Мощность моторов по 12,8 л. с., число оборотов в минуту 770/1540. Количество но конечных выключателей 6, тормозов 2.
Схема механизма указателя представлена на фиг. 336, б. Этот механизм состоит из 4 цилиндрических и 2 конических пар, имеющих11 шестерен, причем конструкция механизма и передаточные числа отдельных пар обеспечивают общие передаточные числа трем стрелкам указателя, показывающим десятки миллиметров, миллиметры и десятые доли миллиметра.
Смазка привода и всего уравновешивающе-нажимного механизма жидкая циркуляционная от отдельного насоса, производительностью 18 л/мин, давлением 15кг/см при мощности мотора 0,8 кв и числе оборотов в минуту 950.
Фиг. 336 б. Схема привода механизма указателя для универсальной клети с несколькими комбинациями количества применяемых в ней валков. — нажимные винты; — червячные передачи, — планетарный редуктор механизма указателя; IV — циферблат указателя. Передачи: 1 — конические шестерни от вала нажимного устройства к механизму указателя; 2 и 3 — цилиндрические шестерни, связанные с валом А указателя десятых долей миллиметра; 4—7 - цилиндрические шестерни, связанные с валом Б указателя миллиметров; 8 и 9 — цилиндрические шестерни, связанные с валом В указателя десятков миллиметров; 10 и 11 — конические шестерни, связывающие планетарный редуктор с командо-аппаратом

