 2015-02-14
2015-02-14 6313
6313При описании движения точки по окружности мы будем характеризовать перемещение точки углом Δφ, который описывает радиус-вектор точки за время Δt. Угловое перемещение за бесконечно малый промежуток времени dt обозначается dφ.
Угловое перемещение – величина векторная. Определяется направление вектора  (или
(или  ) по правилу буравчика: если вращать буравчик (винт с правосторонней резьбой) в направлении движения точки, то буравчик будет двигаться в направлении вектора углового смещения. На рис. 14 точка М движется по часовой стрелке, если смотреть на плоскость движения снизу. Если крутить буравчик в этом направлении, то вектор будет направлен вверх.
) по правилу буравчика: если вращать буравчик (винт с правосторонней резьбой) в направлении движения точки, то буравчик будет двигаться в направлении вектора углового смещения. На рис. 14 точка М движется по часовой стрелке, если смотреть на плоскость движения снизу. Если крутить буравчик в этом направлении, то вектор будет направлен вверх.
Таким образом, направление вектора углового перемещения определяется выбором положительного направления вращения. Положительное направление вращения определяется правилом буравчика с правосторонней резьбой. Однако с таким же успехом можно было взять буравчик с левосторонней резьбой. В этом случае направление вектора углового смещения было бы противоположным.
При рассмотрении таких величин, как скорость, ускорение, вектор смещения  не возникал вопрос о выборе их направления: оно определялось естественным образом из природы самих величин. Такие вектора называются полярными. Вектора, подобные вектору углового перемещения, называются аксиальными, или псевдовекторами. Направление аксиального вектора определяется выбором положительного направления вращения. Кроме того, аксиальный вектор не имеет точки приложения. Полярные векторы, которые мы рассматривали до сих пор, приложены к движущейся точке. Для аксиального вектора можно лишь указать направление (ось, axis – лат.), вдоль которой он направлен. Ось, вдоль которой направлен вектор углового смещения, перпендикулярна плоскости вращения. Обычно вектор углового перемещения изображают на оси, проходящей через центр окружности (рис. 14), хотя его можно нарисовать в любом месте, в том числе на оси, проходящей через рассматриваемую точку.
не возникал вопрос о выборе их направления: оно определялось естественным образом из природы самих величин. Такие вектора называются полярными. Вектора, подобные вектору углового перемещения, называются аксиальными, или псевдовекторами. Направление аксиального вектора определяется выбором положительного направления вращения. Кроме того, аксиальный вектор не имеет точки приложения. Полярные векторы, которые мы рассматривали до сих пор, приложены к движущейся точке. Для аксиального вектора можно лишь указать направление (ось, axis – лат.), вдоль которой он направлен. Ось, вдоль которой направлен вектор углового смещения, перпендикулярна плоскости вращения. Обычно вектор углового перемещения изображают на оси, проходящей через центр окружности (рис. 14), хотя его можно нарисовать в любом месте, в том числе на оси, проходящей через рассматриваемую точку.
В системе СИ углы измеряются в радианах. Радиан – это такой угол, длина дуги которого равна радиусу окружности. Таким образом, полный угол (3600) равен 2π радиан.
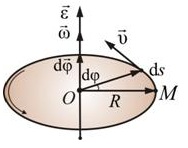
Рис. 14.
Движение точки по окружности
Угловая скорость – векторная величина, численно равная углу поворота за единицу времени. Обозначается обычно угловая скорость греческой буквой ω. По определению, угловая скорость – это производная угла по времени:
 . (19)
. (19)
Направление вектора угловой скорости совпадает с направлением вектора углового перемещения (рис. 14). Вектор угловой скорости, так же, как и вектор углового перемещения, является аксиальным вектором.
Размерность угловой скорости – рад/с.
Вращение с постоянной угловой скоростью называется равномерным, при этом ω = φ/t.
Равномерное вращение можно характеризовать периодом обращения Т, под которым понимают время, за которое тело делает один оборот, т. е. поворачивается на угол 2π. Поскольку промежутку времени Δt = Т соответствует угол поворота Δφ = 2π, то
 (20)
(20)
Число оборотов в единицу времени ν, очевидно, равно:
 (21)
(21)
Величина ν измеряется в герцах (Гц). Один герц – это один оборот в секунду, или 2π рад/с.
Понятия периода обращения и числа оборотов в единицу времени можно сохранить и для неравномерного вращения, понимая под мгновенным значением T то время, за которое тело совершило бы один оборот, если бы оно вращалось равномерно с данным мгновенным значением угловой скорости, а под ν понимая то число оборотов, которое совершало бы тело за единицу времени при аналогичных условиях.
Если угловая скорость меняется со временем, то вращение называется неравномерным. В этом случае вводят угловое ускорение аналогично тому, как для прямолинейного движения вводилось линейное ускорение. Угловое ускорение – это изменение угловой скорости за единицу времени, вычисляется как производная угловой скорости по времени или вторая производная углового смещения по времени:
 (22)
(22)
Так же, как и угловая скорость, угловое ускорение является векторной величиной. Вектор углового ускорения – аксиальный вектор, в случае ускоренного вращения направлен в ту же сторону, что и вектор угловой скорости (рис. 14); в случае замедленного вращения вектор углового ускорения направлен противоположно вектору угловой скорости.
При равнопеременном вращательном движении имеют место соотношения, аналогичные формулам (10) и (11), описывающим равнопеременное прямолинейное движение:
ω = ω0 ± εt,
 .
.

