2015-03-20
2015-03-20 1417
1417Этот критерий разработан в 1923 г. американским ученым Найквистом. Он позволяет судить об устойчивости замкнутой системы по поведению АФЧХ разомкнутой системы.
Вектор  разомкнутой системы при изменении частоты
разомкнутой системы при изменении частоты  от
от  до
до  меняется по величине и фазе.
меняется по величине и фазе.
Кривая, описываемая окончанием этого вектора есть АФЧХ разомкнутой системы, причем следует отметить, что вид этой характеристики симметричен относительно начала координат, т.е.
Для доказательства критерия Найквиста используют дополнительную функцию вида:

Причем в знаменателе такой функции будет записан характеристический полином разомкнутой системы, а в числителе характеристический полином замкнутой системы:
В случае замены оператора Лапласа р на  , получим частотную функцию вида:
, получим частотную функцию вида:
Пусть характеристическое уравнение замкнутой системы  имеет
имеет  - правых корней и
- правых корней и  - левых корней, а характеристическое уравнение разомкнутой системы
- левых корней, а характеристическое уравнение разомкнутой системы  имеет
имеет  правых и
правых и  левых корней (под правыми корнями подразумевают корни лежащие справа от мнимой оси комплексной плоскости и определяющие неустойчивость функционирования системы).
левых корней (под правыми корнями подразумевают корни лежащие справа от мнимой оси комплексной плоскости и определяющие неустойчивость функционирования системы).
При рассмотрении этого критерия так же работает принцип аргумента, который определяет, что устойчивой система является, когда вектор  повернется на соответствующий угол.
повернется на соответствующий угол.
Разомкнутая система являющееся неустойчивой и имеющая правых корней будет определять, что замкнутая система устойчивая тогда и только тогда, когда АФЧХ вспомогательной функции при изменении частоты от  до охватывает начало координат в положительном направлении
до охватывает начало координат в положительном направлении  - раз.
- раз.
Найквистом было отмечено, что движение вектора вокруг начала координат равно числу оборотов вектора  вокруг точки с координатами
вокруг точки с координатами  .
.
Критерий устойчивости Найквиста: если разомкнутая система автоматического управления неустойчива, то для того чтобы замкнутая система была устойчивой необходимо и достаточно, чтобы АФЧХ разомкнутой системы при изменении частоты от до охватывала точку с координатами в положительном направлении - раз (где число правых корней характеристического уравнения разомкнутой системы).
При сложной форме характеристик может возникнуть затруднение при определении числа оборотов вокруг критической точки с координатами  .
.
Для анализа поведения таких характеристик применяют «правило переходов» Ципкина. Назовем переход АФЧХ через действительную ось слева от точки при возрастании положительным (если характеристика пересекает вещественную ось сверху-вниз), а справа от точки отрицательным. Также отрицательным считается переход слева от точки , но совершённым при пересечении вещественной оси снизу-вверх. В этом случае, если АФЧХ начинается на отрезке  при
при  или заканчивается на нем при
или заканчивается на нем при  , считается, что АФЧХ совершила пол перехода.
, считается, что АФЧХ совершила пол перехода.
Критерий Найквиста для рассматриваемого варианта: если разомкнутая САУ неустойчива, то для того чтобы замкнутая система стала устойчива необходимо и достаточно, чтобы разность между положительным и отрицательным переходами АФЧХ разомкнутой системы через отрезок вещественной оси при изменении от до была равна - раз.
Критерий Найквиста для случая, когда разомкнутая система устойчива имеет следующую формулировку: если САУ разомкнутая устойчива, то замкнутая система будет устойчивой, если АФЧХ разомкнутой системы не охватывает точку с координатами .
Достоинство критерия Найквиста заключается в том, что его можно использовать даже если неизвестны структуры отдельных звеньев системы, достаточно получить АФЧХ. Кроме того, рассматриваемый критерий позволяет анализировать устойчивость систем обладающих запаздыванием.
8.
Четырьмя основными логическими командами являются AND (и), OR
(или), XOR (исключающее или), NOT (не). Существуют и другие
логические функции, состоящие из этих четырех функций, но в
микропроцессоре 8088 для них нет соответствующих команд. Эти четыре
команды работают непосредственно с нулями и единицами двоичного
кода.
9.
Классификация адаптивных систем: самонастраивающиеся системы, системы с адаптацией в особых фазовых состояниях и обучающиеся системы (см. рис.).
 |
Самонастраивающиеся системы (СНС) характеризуются наличием специальных контуров самонастройки, с помощью которых оцениваются динамические и статические свойства системы и формируются такие контролируемые воздействия, что система самопроизвольно приближается к определённому эталону, часто задаваемому математически в виде критерия качества функционирования. При этом контур самонастройки служит для изменения параметров или структуры основного контура с целью обеспечения заданного критерия качества управления. Обычно критерий качества управления выражается в виде функционала или функции от параметров и измеряемых координат системы. В процессе работы системы значение функционала качества изменяется и задача контура самонастройки сводится к обеспечению экстремального (минимального или максимального) значения критерия. Нахождение и поддержание экстремального значения критерия качества управления может производиться или с помощью пробных отклонения системы, или путём аналитического определения условий экстремума. В зависимости от указанных способов нахождения экстремума самонастраивающиеся системы подразделяются на поисковые и беспоисковые. В свою очередь поисковые самонастраивающиеся системы в зависимости от применяемых методов поиска делятся на системы со случайным поиском, с поиском по методу Гаусса-Зейделя, с поиском по методу градиента, с поиском по методу наискорейшего спуска. В классе беспоисковых СНС можно выделить самонастраивающиеся системы, использующие информацию о частотных характеристиках, СНС с контролем временных характеристик и границ устойчивости, СНС с эталонными моделями, градиентные СНС.
Системы с адаптацией в особых фазовых состояниях используют особые режимы или свойства нелинейных систем, например режимы автоколебаний, скользящие режимы для организации контролируемых изменений динамических свойств системы управления. Специально организованные особые режимы в таких системах либо служат дополнительным источником рабочей информации об изменяющихся условиях функционирования системы, либо наделяют систему управления новыми свойствами, за счёт которых динамические характеристики управляемого процесса поддерживаются в желаемых пределах не зависимо от характера возникающих при функционировании изменений. Эти системы можно подразделить на релейные автоколебательные системы и адаптивные системы с переменной структурой.
Обучающиеся системы управления характеризуются наличием специальных процессов обучения, которые заключатся в постепенном накапливании, запоминании и анализе информации о поведении системы и изменении законов функционирования в зависимости от приобретаемого опыта. К процессу обучения приходиться прибегать тогда, когда не только мал объём априорных сведений об объекте, но и отсутствует возможность установления детальных причинно-следственных связей в структуре самой системы из-за её сложности.
Накопление и обобщение информации в процессе обучения можно осуществлять за счёт внесения “эталонного опыта” в систему из вне, либо путем формирования такого опыта внутри системы. Например, в первом случае обучаемой системе предъявляют последовательность ситуаций, образов или режимов, которые имеют заранее известные характеристики или различаются по принадлежности определённым классам. Поведение системы в ответ на такую обучающую последовательность ситуаций формируют на основе принципа “поощрение-наказание”, т.е. правильная реакция системы на предъявлённую ситуацию запоминается и используется для организации контролируемых изменений динамических свойств системы управления. В зависимости от способов накопления опыта указанные системы разделяют на обучающиеся с поощрением и обучающиеся без поощрения (самообучающиеся) системы.
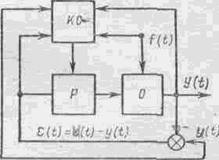
Структурная схема самонастраивающейся системы управления представлена на рис. 1. К основному контуру управления, состоящему из регулятора Р и объекта О, добавлен контур самонастройки КС, с помощью которого осуществляется коррекция параметров и алгоритма управления регулятора.