 2015-03-27
2015-03-27 2757
2757Основным элементом приемной станции, определяющим качество функционирования системы цикловой синхронизации, является приемник синхросигнала, обеспечивающий установку синхронизма после включения аппаратуры в работу, контроль за состоянием синхронизма в рабочем режиме, обнаружение сбоя синхронизма по времени, превышающего допустимое значение, восстановление синхронизма после его нарушения. В приемнике синхросигнала осуществляется опознавание кодовых групп, структура которых совпадает со структурой синхросигнала, и принимается решение о принадлежности опознанных кодовых групп передаваемому синхросигналу. При обнаружении циклового синхросигнала генераторное
оборудование приемной станции устанавливается в синхронный режим, обеспечивающий правильное распределение принятой информации по каналам или потокам.
Установлению состояния синхронизма в ЦСП предшествует режим его поиска. Поиск состояния синхронизма - это процесс контроля импульсных позиций группового ИКМ сигнала с целью обнаружения синхросигнала. По результатам каждого контрольного испытания принимается решение о соответствии или несоответствии символов анализируемого группового ИКМ сигнала синхросигналу, а следовательно о необходимости продолжения или прекращения поиска. Состояние циклового синхронизма в ЦСП обычно считается достигнутым при обнаружении кодовых групп синхросигнала определенное число раз подряд, хотя возможны и другие критерии фиксации состояния синхронизма.
Приемники синхросигнала, используемые в ЦСП ИКМ-ВРК, можно классифицировать по ряду признаков.
В зависимости от характера используемых элементов различают приемники аналогового и дискретного типа. Первые варианты приемников строились по аналоговому принципу выделения синхросигнала с помощью фильтров. Замена фильтров в цепях поиска логическими дискретными элементами позволила существенно ускорить процесс восстановления синхронизма. Приемники дискретного типа реализованы во всех современных ЦСП.
Дискретные приемники синхросигнала по алгоритму поиска состояния синхронизма подразделяются на приемники с задержкой контроля и на приемники со скользящим поиском. В приемниках первого типа каждый последующий этап контроля осуществляется через определенный отрезок времени, например через цикл. В приемниках со скользящим поиском эта задержка исключается.
В зависимости от числа тактов сдвига при фиксации ошибки в процессе поиска различают приемники с многоразовым и одноразовым сдвигом. В приемниках скользящего поиска осуществляется одноразрядный и многоразрядный сдвиг, в приемниках с задержкой контроля осуществляется многоразрядный сдвиг только при наличии группы параллельно работающих устройств контроля.
В зависимости от структуры синхросигнала различают приемники односимвольного и многосимвольного сосредоточенного или рассредоточенного синхросигнала.
Принцип действия указанных выше приемников основан на выявлении различия статистических свойств информационных и синхронизирующих сигналов при их сравнении.
Отдельную группу составляют приемники, принцип действия которых основан на выявлении статистических закономерностей, присущих только информационному сигналу. Так, например, при кодировании многоканального телефонного сигнала с нормальным распределением мгновенных значений и кода Грея вероятности р, появления единиц в отдельных разрядах неодинаковы. Расчеты показывают, что р\ ~ 0,5, pi ~ 0,95, ръ = 0,32, ар4 = р5 =рь ••■- 0,5. Выявление этой закономерности, обусловленной характером кодируемого сигнала и типом применяемого кода, позволило исключить необходимость ввода специальных синхросимволов на передаче.
В этом случае система поиска путем последовательного контроля импульсных позиций обнаруживает второй разряд в кодовых группах, отличающихся от всех остальных высокой плотностью следования единиц. Фиксация статистически устойчивых параметров импульсных сигналов на определенных позициях в кодовых группах позволяет использовать их в качестве опорных сигналов при построении систем синхронизации. Все остальные импульсные последовательности, обеспечивающие нормальную работу приемной станции, могут быть получены с помощью простых операций деления тактовой частоты и временного сдвига относительно
опорных.
Кроме того, приемники синхросигнала могут быть разделены по принципу их функционирования на неадаптивные и адаптивные в зависимости от предполагаемой заранее вероятности ошибки в тракте передачи синхросигнала или от изменения ее реальных значений соответственно.
В ЦСП ИКМ-ВРК основное применение нашли адаптивные приемники синхросигнала с одноразрядным сдвигом с задержкой контроля или со скользящим поиском.
5.5. Приемники синхросигнала с задержкой контроля и одноразрядным сдвигом
Структурная схема приемника с задержкой контроля на цикл и одноразрядным сдвигом приведена на рис. 5.15.
Основными узлами приемника синхросигнала являются опознаватель синхрогрупп, анализатор и решающее устройство.
Выделитель тактовой частоты (ВТЧ), схема управления (или элемент запрета НЕТ) относятся в целом к генераторному оборудованию приема (ГОпрм)-
Опознаватель синхрогрупп предназначен для выделения из группового ИКМ сигнала, поступающего на вход приемной станции, кодовой комбинации, соответствующей синхросигналу. В качестве опознавателей
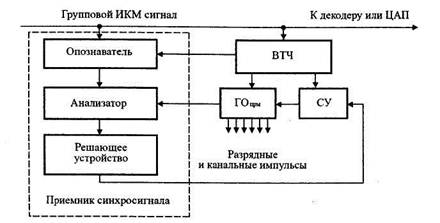 |
Рис. 5.15. Приемник синхросигнала с задержкой контроля и одноразрядным сдвигом
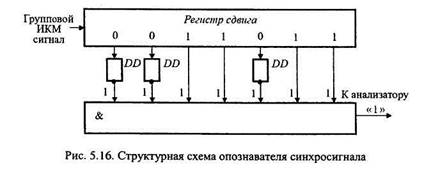
обычно используются регистры сдвига, к отводам которых непосредственно или через инверторы подключен многовходовой элемент И (рис. 5.16).
В течение каждого тактового интервала в регистр сдвига записывается один символ принимаемого сигнала, причем с приходом очередного символа предыдущий продвигается в следующую ячейку регистра. Таким образом, за к тактов в регистр записывается ^-символьная кодовая комбинация. Затем производится сравнение структуры каждой принимаемой последовательности из к символов с копией синхрогруппы, записанной в опознавателе. При их совпадении на выходе многовходового элемента И появляется логическая 1, в противном случае - 0.
Опознаватели синхрогрупп могут быть реализованы на линии задержки, выходные сигналы с отводов которой через повторители
 |
и инверторы
подаются на суммирующее устройство. При поступлении кодовой группы заданной структуры напряжение на выходе сумматора достигает максимального значения, что фиксируется пороговым устройством, на выходе которого при этом появляется 1.
Анализатор. С выхода опознавателя последовательность 1 поступает на анализатор, на второй вход которого поступает последовательность ипульсов от генераторного оборудования приема - ГО,1рм. Частота следования импульсов от ГО11рм либо равна частоте следования синхроимпульсов, либо кратна частоте повторения циклов, т.е. соответствует периодичности передачи синхросигнала. Анализатор в процессе каждого испытания принимает решение о соответствии сигнала опознавателя синхросигналу по периоду следования и времени появления импульсов. Обычно эту задачу выполняет сумматор по модулю 2: (1 + 1=0, 0 + 0 = 0, 1+0=1 и 0 + 1 = 1). Несовпадение символов сравниваемых сигналов фиксируется в виде импульсов ошибки. Отсутствие импульсов ошибки на выходе анализатора свидетельствует о совпадении сравниваемых сигналов по периоду следования импульсов и времени их появления.
В том случае, когда синхрогруппа передается в каждом цикле передачи, на анализатор подается регулярная местная импульсная последовательность. Тогда схема анализатора упрощается; в простейшем случае роль анализатора может выполнять элемент И или элемент запрета НЕТ в зависимости от того, какой из сигналов (синхронизм или ошибка) желательно получить на выходе. В некоторых случаях, в зависимости от способа построения решающего устройства, с выхода анализатора снимают оба указанных сигнала. Таким образом, оценка соответствия опознаваемых кодовых групп синхросигналу в приемнике осуществляется в дваэтапа.
На первом этапе поступившая в опознаватель кодовая группа оценивается на соответствие синхрогруппе по числу символов и
 |
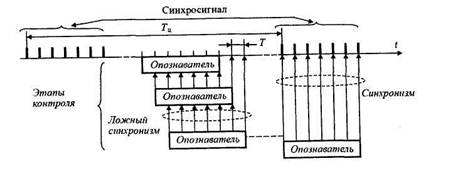
| Рис. 5.17. Алгоритм поиска состояния синхронизма в системах синхронизации с задержкой контроля на цикл |
характеру их следования (по структуре). На втором этапе сигналы сравниваются по периоду следования и времени их появления. Сигнал с выхода анализатора отражает общую оценку сравнения по всей совокупности параметров: по числу символов, структуре, периоду следования и времени появления импульсов.
Решающее устройство. Между анализатором и схемой управления (рис. 5.15) включено решающее устройство (РУ), осуществляющее оценку выходного сигнала анализатора по определенному критерию и на основе этой оценки принимающее решение о наличии или отсутствии синхронизма. Так, например, если в режиме синхронизма число импульсов ошибки, поступивших в РУ за время принятия решения, меньше опреде порогового значения, система остается в синхронизме. Таким образом, РУ обеспечивает защиту системы от сбоев синхронизации при воздействии кратковременных помех.
Если число импульсов ошибки за время принятия решения превышает пороговое значение, то РУ фиксирует сбой синхронизма и обеспечивает переход системы в режим поиска. Сигналы ошибки с выхода анализатора в этом режиме передаются в устройство сдвига (торможения) импульсных последовательностей ГОпрм. После восстановления синхронизма РУ вновь подключается к выходу анализатора, обеспечивая защиту системы от сбоев при воздействии помех.
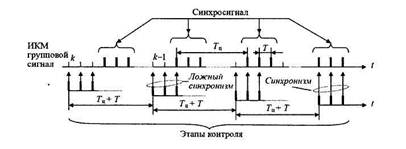
Взаимодействие узлов в процессе поиска синхронизма. Алгоритм поиска синхронизма в системах с задержкой контроля и одноразрядным сдвигом поясняется рис. 5.17. Вертикальными черточками здесь обозначены импульсные позиции группового ИКМ сигнала; на каждой из них передается импульс или пробел.
Для примера показаны кодовые группы синхросигнала, состоящие из трех импульсов.
Поиск состояния синхронизма осуществляется путем последовательной проверки символов группового ИКМ сигнала на соответствие синхросигналу. Эталоном для сравнения может служить местный синхросигнал, формируемый ГОГфМ, или копия синхросигнала, записанная в опозна-вателе (комбинация прямых отводов и отводов с инверторами). Приемники с генераторами местного синхросигнала обычно сложнее и поэтому используются редко.
При включении аппаратуры в работу приемник синхросигнала с помощью опознавателя начинает проверять произвольную группу символов группового ИКМ сигнала, первый из которых, предположим, сдвинут на к импульсных позиций от синхросигнала. Если при первой проверке в ана-
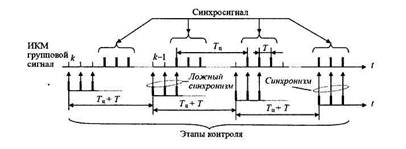 |
лизаторе наблюдается несовпадение символов сравниваемых последовательностей, то анализатор формирует сигнал ошибки, вызывающий при помощи СУ (рис. 5.15) сдвиг (торможение) последовательностей ГОпрм на один период тактовой частоты Т по отношению к передающему (после срабатывания решающего устройства). На выходе делителей частоты ГОПрМ этот период окажется удлиненным по отношению к нормальному периоду частоты повторения циклов Гц и составит Тп + Т (удлиненный цикл). Таким образом, каждая следующая проверка со сдвигом происходит с задержкой на цикл. При этом новая проверяемая группа символов ИКМ последовательности окажется на расстоянии к - 1 импульсных позиций от синхросигнала. В процессе поиска возможно также формирование дополнительных циклов поиска длительностью Ти, связанных со случайными совпадениями символов ИКМ сигнала и местного контрольного сигнала (ложный синхронизм). В этом случае сдвига импульсных последовательностей ГОПрм не происходит. Однако такое положение в силу случайного характера ИКМ сигнала долго продолжаться не может и при последующих повторных проверках будет зафиксирована ошибка. Процесс последовательной проверки ИКМ сигнала и торможения приемного оборудования по отношению к передающему будет продолжаться до тех пор, пока между сравниваемыми последовательностями не установится однозначное соответствие, фиксирующее состояние синхронизма в системе.
В настоящее время находят применение ЦСП ИКМ-ВРК (например, мультиплексоры потоков DS1), в которых в качестве синхросигнала используют чередующуюся последовательность
одиночных импульсов и пробелов. Частота следования импульсов синхросигнала составляет половину частоты следования циклов, что существенно уменьшает вероятность его имитации импульсами информационного группового ИКМ сигнала (ложный синхронизм).
Использование непрерывной последовательности единиц или нулей в качестве синхросигнала не представляется возможным, так как в режиме молчания кодовые группы каналов имеют постоянный характер, повторяются с частотой следования циклов и определенные их символы могут быть приняты за синхросигнал. Чередование символов синхросигнала эквивалентно двукратному увеличению числа циклов поиска (среднее время вхождения в синхронизма Гвх1 = 2N0Tn, здесь No - общее число символов в цикле, среднее время восстановления синхронизма Г„1 = 2 rBXi).
 |
При использовании односимвольного чередующего синхросигнала формирователь синхросигнала (рис. 5.14) значительно упрощается; он состоит лишь из триггера, управляемого с частоСтруктурная схема приемника синхросигнала остается прежней (рис. 5.15), только опознаватель заменяется элементом И, а местный импульсный сигнал подается на анализатор через цикл (в соответствии с передаваемым чередующимся синхросигналом).
Основной недостаток устройства с односимвольным чередующимся синхросигналом состоит в том, что в зависимости от характера обнаруженного в процессе поиска синхроимпульса (т. е. совпадение импульсов и пробелов сравниваемых в анализаторе сигналов или сдвиг сравниваемых последовательностей на полпериода) возможна фиксация или проскок состояния синхронизма.
В связи с этим максимальное число проверяемых импульсных позиций в процессе поиска с равной вероятностью может принимать значения No- 1 или 2No-l.
Принципиальный недостаток устройства с последовательным одноразрядным сдвигом и задержкой контроля состоит в том, что контрольные испытания в процессе поиска состояния синхронизма осуществляются через цикл. Однако благодаря простоте реализации и небольшому объему служебной информации (односимвольный синхросигнал) устройства этого типа нашли практическое применение в относительно малоканальных ЦСП ИКМ-ВРК.
5.6. Приемники синхросигнала со скользящим поиском
В приемниках со скользящим поиском задержка на цикл при каждом контрольном испытании со сдвигом отсутствует, что создает предпосылки для значительного ускорения процесса восстановления синхронизма. Алгоритм поиска состояния синхронизма для рассматриваемого приемника показан на рис. 5.18.
Опознаватель, сдвигая каждый раз момент регистрации на один такт, будет проверять поступающие кодовые комбинации на их соответствие синхрогруппе. Таким образом, синхросигнал будет найден в течение одного цикла или быстрее, так как ситуация, что за период цикла будет отсутствовать комбинация, похожая на синхрогруппу, маловероятна.
Для подтверждения правильности выделения синхросигнала следующая проверка наличия синхросигнала будет ровно через цикл. Приемники данного типа нашли широкое применение в ЦСП ИКМ-ВРК нового поколения и реализованы в различного вида адаптивных и неадаптивных приемниках синхросигналатой следования циклов, и элемента И, выходной сигнал которого поступает в передатчик
Рис. 5.18. Алгоритм поиска состояния синхронизма приемника скользящего поиска








