 2015-03-27
2015-03-27 1060
1060АБТ – блокировка автотормозов. Обеспечивает образование цепи управления ТЭД при выключенных тормозах электровоза
РП28 – реле промежуточное. При разряде ТМ шестым положением ручки крана машиниста обеспечивает выключение линейных контакторов и подачу песка под колесные пары
ПкР – реверсор для изменения направления движения
ПкТ – тормозной переключатель. В режиме тяги обеспечивает соединение ТЭД последовательно
ПкГ1 – групповой переключатель для переключения ТЭД из «С» в «СП» соединение
РВ6 – реле времени с выдержкой на отпадание якоря 2-3 секции. При повороте валов ПкГ более этого времени выключает линейные контакторы.
БВ1 – блокировка низковольтная БВ
РП 20 – промежуточное реле. Обеспечивает выключение линейных контакторов после разворота реверсора
РП 23 – реле промежуточное. При нарушении целостности тормозной магистрали обеспечивает выключение линейных контакторов и загорание сигнальной лампы «ТМ»
ВУП6 – выключатель управления пневматический выключает линейные контакторы при снижении давления в ТМ до 2,7-2,9 Атм
К1 К10 – линейные контакторы. Подключают ТЭД к контактной сети
3 НАУЧНЫЕ ПРОБЛЕМЫ ТРАНСПОРТА
Развитие науки для решения транспортных проблем обусловлено тем обстоятельством, что в отдельных случаях имеет место кризисное состояние традиционных видов транспорта, проявляющееся в усугублении проблем безопасности и экологии, несоответствии провозной способности транспорта мощности производства и пассажиропотока и др.
Для решения сложных научно-технических проблем, которые стоят перед транспортом и без решения которых невозможно выполнение задач по обслуживанию развивающейся экономики, необходимо развивать такие основополагающие прикладные и фундаментальные области науки, как физика, механика, термо- и гидродинамика, строительная механика, автоматика и многие другие смежные, прикладные и фундаментальные науки. Задачи, которые ставит транспортная логистика перед наукой, касаются технических и технологических изменений имеющихся достижений в области транспорта.
Развитие транспорта способствовало научной постановке многих вопросов и проведению ряда исследований. Например, необходимость совершенствования двигателя в целях уменьшения негативного воздействия на экологию и повышения коэффициента полезного действия стала стимулом для создания кинетической теории газов и термодинамики; теория остойчивости судов создана академиком А. Н. Крыловым в связи с аварией произошедшей из-за неправильного размещения тяжелого оборудования для Волховской ГЭС при доставке его из Германии и Швеции в Россию морским путем. Развитие автомобильного транспорта привело к изменению технологии производства автомобилей — появился конвейер.
Взаимно обогащаясь, наука и транспорт стимулируют научно-технический прогресс, причем все увеличивающимися темпами. Так, до реализации выдвинутой Леонардо да Винчи идеи о возможности полетов человека прошло почти 500 лет, идея радио воплотилась в жизнь через 50 лет после ее появления. На телефонизацию четверти семей США ушло 35 лет, а Интернет в таком же количестве семей появился через 7 лет. При анализе статистики мировых открытий за последние 30 лет установлено, что 84 % открытий делают ученые-одиночки и лишь 16 % — научно-исследовательские группы.
Целесообразность воплощения в жизнь любой идеи определяется экономикой и экологией. Многие из новых видов транспорта — это отвергнутые по экономическим причинам, а иногда из-за технического несовершенства старые идеи. Например, электромобиль был создан и эксплуатировался во второй половине XIXв., но был забыт на 100 лет из-за несовершенства двигателя, который впоследствии был заменен другим, более мощным. Однако появившиеся экологические проблемы возвращают электрический двигатель, но на качественно новом уровне. Идея монорельсовой дороги воплотилась в жизнь лишь через 150 лет, но развиваться она начала с 50 — 60 гг. XX в. Идея двигателя Стирлинга, выдвинутая в 1812 г., начала реализовываться лишь сегодня на новой технической основе. К созданию инерционного двигателя В. И. Шуберского, рассчитанного более 100 лет назад, приступают лишь сегодня и т.д.
Нужно заметить, что каждый вид транспорта ставит перед наукой свои проблемы.
Железнодорожный транспорт. Одна из основных научных проблем — повышение скорости движения (рисунок 8) — обострилась в связи с ухудшением экологической обстановки в мире, что потребовало расширения использования транспорта на электрической энергии. Поскольку провозная способность железных дорог во много раз превышает этот показатель на других видах транспорта, то электрифицированный железнодорожный транспорт в настоящее время наиболее предпочтителен.
Ученые разных стран мира установили, что на железной дороге экономически эффективной является скорость до 340 км/ч (скорость свыше 300 км/ч получают при применении магнитного подвешивания). Такая скорость дает определенные преимущества железным дорогам в конкурентной борьбе с другими видами транспорта. По расчетам французских ученых, длина трассы для повышения скорости до намеченного уровня должна быть не меньше 600 — 800 км. Достижение скорости выше указанных значений связано с увеличением стоимости строительства путей в 3 — 5 раз, что может перекрыть экономический эффект от повышенной скорости. Увеличение скорости железнодорожного транспорта привело к необходимости решения ряда проблем.
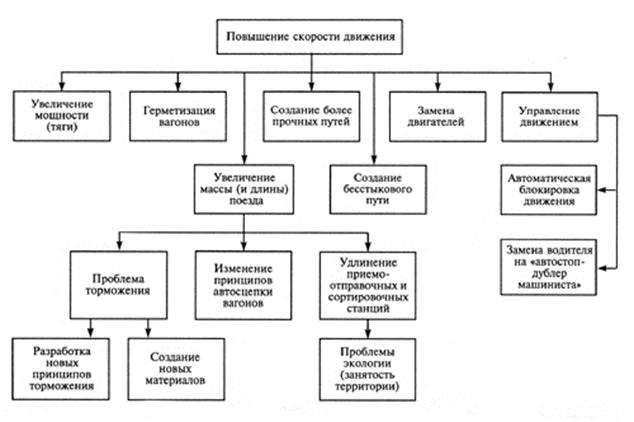
Рисунок 10 - Проблема повышения скорости движения
Потребовалось увеличение мощности (тяги). При скорости 200 км/ч 30% массы приходится на электрооборудование, поэтому необходим дополнительный двигатель. Сегодня эксплуатируются электровозы мощностью 11 тыс. л. с, тепловозы — мощностью 8 тыс. л. с. При такой мощности локомотива поезд может перевозить одновременно до 7,5 тыс. т груза, что недостаточно для эффективных перевозок, особенно массовых дешевых грузов.
Потребовалась замена двигателей. Сегодня необходимо применение газовых, турбореактивных и других типов двигателей, но остаются нерешенными проблемы шума.
Появилась проблема герметизации вагонов. При скорости свыше 250 км/ч у человека возникают болевые ощущения в ушах, поэтому необходимо применение трехслойных стекол. Особенно часто негативные ощущения — боль, шум, вибрация — возникают при проезде тоннелей (причина — повышенное давление в замкнутом пространстве).
Необходимо создание бесстыкового пути (так называемого «бархатного пути»), при котором число рельсовых стыков (самых уязвимых и напряженных мест пути) будет минимально, для обеспечения плавности хода. Бесстыковой путь особенно эффективен на линиях с высокими скоростями движения, так как повышает комфортность поездки пассажиров; увеличивает надежность работы автоблокировки; снижает на 5—15 дБ уровень шума, удельное сопротивление движению, расходы электроэнергии и топлива на тягу поездов; продлевает сроки службы верхнего строения пути. Сейчас укладываются плети (рельс, сваренный из нескольких стандартных рельсов) длиной до 1200 м. Основная часть путей России сегодня — плети длиной 150 — 800 м.
Осевые нагрузки на путь увеличиваются с повышением скорости и массы поездов, что требует создания более прочных путей. Прочность пути определяется, прежде всего, прочностью рельсов, поэтому создаются усиленные рельсы (25 — 30 т на ось).
Увеличение массы поезда. Требуется не только повышение мощности локомотива, но и изменение технологии сбора поезда, в том числе требуются дополнительные локомотивы (так называемая кратная тяга) в середине и конце поезда. Сегодня рекорды грузоподъемности поездов в России — 44 тыс. т, в США и Канаде — 30 тыс. т. Такие перевозки осуществляются по специально разработанным маршрутам и расписанию.
Увеличение массы поездов повлекло за собой ряд проблем, главной из которых можно считать торможение. При скорости более 200 км/ч при торможении на каждую ось выделяется 36 МДж теплоты (1 Дж равен примерно 0,239 кал), что потребовало создания новых материалов, выдерживающих температуру свыше 1000 °С, и разработки новых принципов торможения.
Для удержания вагонов поезда большой массы, особенно на уклонах, потребовалось изменить принципы автосцепки вагонов.
Увеличение длинны поезда привело к необходимости удлинения приемо-отправочных и сортировочных станции, включая пассажирские платформы, что, в свою очередь, осложнило проблемы экологии в части занятости территории.
Увеличение скорости привело к проблемам управления движением, обусловленным тем, что при скорости более 160 км/ч глаз человека не воспринимает информацию об окружающей среде, следовательно, машинист не может обеспечить безопасность движения. Это, в свою очередь, потребовало развития систем автоматической блокировки движения при занятом перегоне.
Более пассивная роль машиниста вылилась в возможность его замены на «автостоп-дублер машиниста», т. е. создание систем автоматического управления транспортным средством без участия машиниста. Такие системы повысили безопасность движения на 30 %. Информация в систему подается из вычислительного центра дистанции управления.
Системы управления в автоматическом режиме стали разрабатываться еще при движении по железным дорогам с обычной скоростью. Так, в Канаде системы без машиниста стали применяться с 1972 г. на перевозке угля по специально разработанным маршрутам; в Москве подобная система разработана для движения на метрополитене по кольцевому маршруту; в Сан-Франциско работает пассажирский поезд с автоматизированным управлением.
Нужно заметить, что при перевозке пассажиров нельзя полностью отказываться от присутствия машиниста, просто его функции будут состоять не в управлении транспортным средством, а в наблюдении за процессом посадки-высадки пассажиров на станции в целях обеспечения безопасности. Повышенная скорость требует более совершенных систем управления.
4 ПЕРСПЕКТИВЫ РАЗВИТИЯ ТРАНСПОРТА
Во все времена и у всех народов транспорт играл важную роль. На современном этапе значение его неизмеримо выросло. Сегодня существование любого государства немыслимо без мощного транспорта.
В ХХ в. и в особенности во второй его половине произошли гигантские преобразования во всех частях света и областях человеческой деятельности. Рост населения, увеличение потребления материальных ресурсов, урбанизация, научно-техническая революция, а также естественно-географические, экономические, политические, социальные и другие фундаментальные факторы привели к тому, что транспорт мира получил невиданное развитие как в масштабном (количественном), так и в качественном отношениях. Наряду с ростом протяженности сети путей сообщения традиционные виды транспорта подверглись коренной реконструкции: значительно увеличился парк подвижного состава, во много раз поднялась его провозная способность, повысилась скорость движения. В то же время на первый план вышли транспортные проблемы. Эти проблемы по преимуществу относятся к городам и обусловлены чрезмерным развитие автомобилестроения. Гипертрофированный автомобильный парк крупных городов Европы, Азии и Америки вызывает постоянные пробки на улицах и лишает себя преимуществ быстрого и маневренного транспорта. Он же серьезно ухудшает экологическую обстановку.
Транспорт как особо динамичная система всегда был одним из первых потребителей достижений и открытий самых различных наук, включая фундаментальные. Более того, во многих случаях он выступал прямым заказчиком перед большой наукой и стимулировал ее собственное развитие. Трудно назвать область исследований, не имевшую отношения к транспорту. Особенное значение для его прогресса имели фундаментальные исследования в области таких наук, как математика, физика, механика, термодинамика, гидродинамика, оптика, химия, геология, астрономия, гидрология, биология и другие. В не меньшей степени транспорт нуждался и нуждается в результатах прикладных исследований, проводимых в области металлургии, машиностроения, электромеханики, строительной механики, телемеханики, автоматики, а в последнее время электроники и космонавтики. В свою очередь некоторые открытия и достижения, полученные в рамках собственно транспортных наук, обогащают другие науки и широко используются во многих нетранспортных сферах народного хозяйства.
Дальнейший прогресс транспорта требует использования последних, постоянно обновляемых результатов науки и передовой техники и технологии. Необходимость освоения возрастающих грузовых и пассажирских потоков, усложнение условий для сооружения транспортных линий в необжитых, трудных по топографии районах и крупных городах. Стремления повысить скорость сообщений и частоту отправления транспортных единиц, необходимость улучшения комфорта и снижения себестоимости перевозок – все это требует совершенствования не только существующих транспортных средств, но и поиска новых, которые могли бы более полно удовлетворить поставленным требованиям, чем традиционные виды транспорта. К настоящему моменту разработано и реализовано в виде постоянных или опытно-эксплуатационных установок несколько новых видов транспортных средств и значительно больше существует в виде проектов, патентов или просто идей.
Следует иметь в виду, что большинство так называемых новых видов транспорта в принципе предложены много лет назад, но они не получили применения и ныне повторно предлагаются или возрождаются на современной технической основе.
4.1 Автомобили, движущиеся по рельсам
Среди многочисленных проектов, которые призваны решить проблему перегруженности транспортных сетей мегаполисов, всё чаще встречаются предложения направить городской транспорт, в том числе и автомобили, по рельсам.
Один из самых смелых проектов представила датская компания RUF International. Предлагаемая датчанами транспортная система представляет собой сеть монорельсовых дорог, по которым движется общественный и личный электротранспорт.
Небольшие участки пути транспорт преодолевает по обычным дорогам, после чего въезжает на рельсы и объединяется в своеобразные поезда.
Конструкция автомобиля, движущегося по рельсам представлена на рисунок 11.

Рисунок 11 - Конструкция автомобиля, движущегося по рельсам
Вставшим на рельсы транспортом не нужно управлять — водитель задаёт программу и может спать, читать, выходить в Интернет или смотреть телевизор — информация передаётся некоему "главному диспетчеру" и автоматическая система всё сделает сама, руководствуясь показаниями установленных повсюду, в том числе и под землёй, датчиков.
В случае необходимости, водитель сможет снова взять управление на себя. Подразумевается, что скорость езды по рельсам будет 120 км/час.
Согласно проекту RUF International, сеть дорог будет состоять из 25-километровых рельсовых участков со специальными "переходами" через каждые пять километров, чтобы одни водители могли присоединиться к "поезду", а другие свернуть или съехать с рельсов (рисунок 12, 13). Максимальная скорость между "переходами" (150 км/час) при приближении к развязкам автоматически снижается до 30 км/час.

Рисунок 12 - Переход на кольцевую линию

Рисунок 13 - Переход с рельсов в дорожное полотно
Участки пути без рельсов также автоматизированы: установленные под землёй датчики образуют своеобразный фарватер, так что водитель может совсем не управлять своим авто.
Энергия для электромобилей подаётся непосредственно по монорельсу — это и обеспечивает электропитание во время движения в "поезде", и заряжает аккумуляторы для непродолжительной езды по обычным дорогам.
По прибытии к месту назначения водитель выходит из машины и отправляется по своим делам — автоматика сама отправит автомобиль на ближайшую стоянку, откуда хозяин может вызвать его для продолжения пути.
Есть и другой вариант — безо всяких стоянок, когда каждый может использовать первый попавшийся автомобиль. В качестве защиты от вандализма разработчики предлагают следующую схему: при входе в машину водитель "предъявляет" некую карту, удостоверяющую личность, которую машина идентифицирует.
Машина "запоминает" того, кто последним ездил на ней, а новый водитель должен будет при входе в авто оценить его состояние. Только в случае "приёмки" машины новый водитель идентифицируется и на некоторое время становится её владельцем.
Машины для транспортной системы RAF могут быть любыми — "легковушка", грузовик, автобус — но для езды по рельсам у всех у них должен быть V-образный канал, проходящий по днищу кузова машины (рисунок 14).

Рисунок 14 - Конструкция рельсов
"Прорезь" проходит посередине и внутри делит салон на две части. Разработчики предлагают использовать "бугор" в качестве подлокотника или "места для ребёнка".
Монорельсовая система предназначена для крупных городов, но авторы проекта не забыли и о жителях пригородной зоны: предусмотрен гибридный транспорт с электрическим и топливным двигателями. Например, общественный пригородный транспорт, названный Maxi-RUF, — это автобус, который может перевозить десять пассажиров, не считая водителя.
Компания работает над своей концепцией с 1988 года. У RUF International 16 спонсоров, в числе которых нет ни одного автопроизводителя, но есть датский филиал Siemens и датские же министерства энергетики и окружающей среды.
Над аналогичным, но куда более реалистичным проектом работают англичане. Монорельсовый проект под названием ULTra (Urban Light Transport) компании Advanced Transport Systems впервые будет реализован в 2004 году. А в январе 2002 года запустили экспериментальную ветвь неподалёку от Бристоля в городе Кардифф (рисунок 15). Если результаты тестов будут признаны удовлетворительными, сети ULTra построят сначала в Кардиффе, а потом и в других городах Великобритании.

Рисунок 15 - Фото экспериментальной ветви в Кардиффе
ULTra — это одна из форм персонального скоростного транспорта (Personal Rapid Transit — PRT). По сути, это монорельсовая дорога, по которой движутся небольшие полностью автоматизированные вагонетки — наземное метро, только без машинистов и, собственно, поездов.
Похожие на капсулы небольшие вагонетки, рассчитанные на несколько человек, будут двигаться по монорельсу со скоростью 25 км/час.
Проект ULTra, который ещё называют "такси без водителя" (driverless taxi), Advanced Transport Systems разрабатывала совместно со специалистами из Бристольского университета.
Первая построенная в Кардиффе испытательная "ветка", по которой будет двигаться 30 "капсул", будет протяжённостью 1,5 км. В развитой сети количество вагонеток увеличится до 120. Движение каждой "капсулы" будет контролироваться центральной системой посредством всевозможных датчиков.
Посадка-высадка пассажиров будет осуществляться на специальных станциях. Нужно отметить, что "капсулы" не останавливаются на главной трассе, а подъезжают к станциям по отдельным путям.
При входе пассажир должен будет вставить в "приёмник" смарт-карту, на которой и будет обозначен маршрут его поездки. Возможно, посредством этой карты будет производиться и оплата за проезд (тариф такой же, как и за проезд в автобусе).
Разработчики утверждают, что, во-первых, их электротранспорт не загрязняет окружающую среду, во-вторых — он лёгкий (вес вагонетки 800 кг), в-третьих, им удалось "минимизировать визуальное вторжение" в архитектурный облик городов и окружающую среду, и, наконец, ULTra — безопасный транспорт.
Действительно, при скорости 25 км/час (а вблизи остановок 5 км/час) мало что может случиться. Тем не менее, каждая вагонетка оборудована специальной "системой обнаружения", которая автоматически остановит "капсулу", если впереди препятствие.
Поломка (вероятность любой из них, по мнению создателей, крайне мала) одной из вагонеток не блокирует всю транспортную систему, а встроенная "система контроля" передаст сигнал в "Центр".
Система предназначена исключительно для городов и, по признанию разработчиков, не заменит автобусы и автомобили, а станет лишь дополнением к существующим видам общественного транспорта.
4.2 Монорельсовые дороги
Монорельсовые дороги были предложены почти 180 лет назад. Первая русская монорельсовая дорога с конной тягой была сооружена у села Мячково в 1820 г. В основном для перевозки леса. Действующую электрическую модель подобной дороги построил в Петербурге инженер И.В.Романов в 1897 г.
Современная монорельсовая дорога – это железобетонная или металлическая балка (рельс), поднятая на эстакаду, и подвижной состав (вагоны) на тележках с пневматическими шинами. Различают навесные дороги, где вагоны имеют нижнюю точку опоры и как бы сидят верхом на несущей балке, и подвесные системы, где вагоны подвешиваются к тележкам, опирающимся на балку. Каждый из названных типов дорог имеет свои преимущества и недостатки. Навесная дорога требует более сложной системы ходовых частей для обеспечения устойчивости вагонов. Кроме того, в неблагоприятных метеоусловиях монорельс (балка) покрывается льдом или снегом и практически выводит систему из строя или требует трудоемкой работы по ее очистке. Наряду с этим данный тип дороги позволяет иметь значительно (на 2-3 м) меньшую высоту опор эстакады и, следовательно, меньшую строительную стоимость (рисунок 16). Для подвесных дорог необходимы, наоборот, более высокие опоры, чтобы обеспечить надлежащий подъем пола (дна) кузова вагона над поверхностью земли (4,0-5,0 м), но ходовые части вагонов существенно упрощаются.

Рисунок 16 - Внешний вид монорельсовой навесной дороги
Действующие ныне монорельсовые дороги имеют в основном электрическую тягу, получая энергию от контактного провода. Они малошумны и не загрязняют воздушного бассейна. Поезд монорельсовой дороги, как и поезд метрополитена, может состоять из одного или нескольких вагонов. Максимальная скорость движения на действующих дорогах составляет 70-125 км/ч, провозная способность – до 40 тыс. пасс/ч. Стоимость сооружения монорельсовых дорог примерно в 2 раза ниже стоимости подземного метрополитена. При наличии свободных пространств для установки эстакады они признаются эффективными в качестве средств городского и пригородного транспорта, а также в сильно пересеченной и горной местности.
В восьмидесятых годах учеными Физико - энергетического института АН Латвийской ССР был создан весьма оригинальный проект монорельса на магнитной подушке для перевозок со скоростью 500 километров в час.
Вагон предполагалось создать на базе уже проверенного в эксплуатации фюзеляжа транспортного самолета Ил-18 (рисунок 17). Длина такого вагона, по проекту вмещавшего 100 пассажиров, составляла 36 метров, ширина 3,5 метра, высота 3, 85 метра, а масса - 40 тонн. Под полом вагона размещались криостаты со сверхпроводящими магнитами, которые соединялись с кузовом через рессорное подвешивание (т.к. при скорости 500 километров в час возмущения от пути невозможно гасить только за счет зазора в магнитной подвеске, принятого равным 22 миллиметра). Преобразователи частоты управлялись бортовым компьютером.
Рисунок 17 - Монорельс на магнитной подушке
Во время стоянки и перемещения в депо и на экипировочные участки вагон должен был двигаться на колесах по рельсам с колеей 3 метра, при движении на перегоне колеса убирались. На эти колеса экипаж также должен был "приземляться" при аварии системы магнитной подвески.
Была построена экспериментальная модель с вагоном массой 3,2 килограмма. В 90-е годы сведений о продолжении работ по данному проекту не поступало.
Несмотря на кажущуюся внешнюю простоту, монорельсовый путь и сложен в устройстве, и трудоемок в постройке. Несущая балка (собственно монорельс) на навесных дорогах изготавливается из монолитного или сборного железобетона, а на всех подвесных - из высокопрочной стали. Этот элемент конструкции должен выдерживать очень большие нагрузки во время разгона и торможения поездов, а также при прохождении поездами криволинейных участков пути. Таковые, в частности, для компенсации центробежных сил, изогнуты в двух плоскостях, что приводит к удорожанию всей постройки. Например, для строительства пути монорельсовой дороги в Диснейленде пришлось заказывать сложную сборную опалубку, состоящую из пятидесяти элементов. Кроме того, монорельсовые дороги сложны в обслуживании пути и подвижного состава, а также требуют подъема пассажиров на эстакаду и спуска с нее.
Указанные недостатки привели к тому, что мире на данный момент построено несколько десятков отдельных линий монорельсовых дорог протяженностью от сотен метров до нескольких километров главным образом в качестве аттракционов в парках, на выставках и т.п.
Вместе с тем монорельсовые дороги могут иметь свою экономически целесообразную сферу применения как полноценный вид городского и междугороднего транспорта.
4.3 Моторвагонные поезда
Начальный этап развития железных дорог характеризовался использованием пассажирских поездов исключительно на локомотивной тяге. С широким распространением электрической тяги появилась альтернатива этому решению в виде поезда, в котором тяговая мощность распределена по всей его длине. До сих пор в этом отношении не определилась единая тенденция, хотя в пригородных пассажирских перевозках практически везде используется принцип распределенной тяги.
На линиях облегченных городских железных дорог и трамвая гибкая и хорошо зарекомендовавшая себя концепция «моторный вагон + прицепной вагон» в конце 1950-х годов из-за больших расходов на персонал была заменена более современной, предусматривающей использование моторвагонных поездов из сочлененных вагонов с общим салоном.
На метрополитене и городских железных дорогах (S-Bahn), имеющих выход на магистральные линии, относительно высокая скорость движения и короткие расстояния между остановками требуют применения поездов с большим числом моторных осей. Еще в 1970 г. при разработке электропоезда серии 420 для городской железной дороги Мюнхена исходили из максимальной мощности системы тягового электроснабжения. Девятивагонный поезд с приводом на все оси имеет мощность продолжительного режима 7,6 МВт, развивает максимальную скорость 120 км/ч и ускорение при разгоне 1 м/с2.
Для пригородных и региональных пассажирских перевозок используют поезда на локомотивной тяге. Депо, осуществляющие техническое обслуживание пассажирских вагонов и локомотивов, были исторически разделены в системе железных дорог. Поезда на локомотивной тяге позволяли гибко реагировать на изменения пассажиропотока путем увеличения или уменьшения числа вагонов. К сожалению, станции многих больших городов являются тупиковыми на ответвлениях от магистральных линий. С введением уплотненных графиков движения время стоянки поездов S-Bahn и региональных необходимо было сокращать из-за недостаточной пропускной способности станций. Все указанные факторы говорили о том, что вместо смены локомотивов речь могла идти только об использовании челночных поездов с локомотивом в одном конце и вагоном с кабиной управления в другом. В качестве альтернативного варианта могут рассматриваться моторвагонные поезда.
В состав пассажирских поездов дальнего сообщения долгое время включались беспересадочные вагоны, которые на маршрутах большой протяженности, в том числе и международных, входили в состав разных поездов. В период развития системы междугородных поездов InterCity (IC) беспересадочные вагоны в международных сообщениях заменили поезда EuroCity (EC). Здесь для электроподвижного состава серьезным препятствием стали места стыкования разных систем тягового тока, а для поездов с тяговым приводом любого типа — различие систем СЦБ.
После того как на границах между европейскими странами были отменены остановки для паспортного и таможенного контроля, смена локомотивов стала тормозом для повышения маршрутной скорости поездов. Современная силовая электроника позволяет с допустимыми расходами строить многосистемные электровозы и электропоезда. Примером могут служить поезда Thalys Национального общества железных дорог Франции (SNCF) с концевыми моторными вагонами (рисунок 18) и ICE3 железных дорог Германии (DBAG) с распределенной тягой (рисунок 19).

Рисунок 18 - Высокоскоростной поезд Thalys с концевыми моторными вагонами

Рисунок 19 - Поезд ICE3 с распределенной тягой
Из-за большого числа тупиковых станций в Германии DBAG широко используют в междугородных сообщениях челночные поезда. Логичным шагом был бы переход от них к моторвагонным поездам с организацией технического обслуживания по системе, принятой для высокоскоростных поездов ICE.








