2015-03-27
2015-03-27 460
460Для решения задач синтеза замкнутых систем регулирования, обладающих хорошим быстродействием и желаемым характером переходных процессов, разработан инженерный метод синтеза, получивший название метода последовательной коррекции с подчиненным регулированием координат или сокращенно метод подчиненного регулирования. В основе этого метода лежит разработка многоконтурных систем, когда в результате синтеза каждый из контуров описывается передаточной функцией второго или третьего порядка и обеспечивает оптимальное управление своей выходной регулируемой координатой.
Для построения такой системы в структурной схеме неизменяемой части системы выделяют последовательность динамических звеньев, каждое из которых имеет на своем выходе соответствующую регулируемую координату, в электроприводах это: ток (I), скорость (w), угол поворота (j) или путь (s). После этого синтезируют контуры регулирования, начиная с контура тока - первой внутренней координаты. Синтез обычно выполняется с использованием активных последовательных корректирующих звеньев (регуляторов), реализуемых на операционных усилителях постоянного тока с большим коэффициентом усиления.
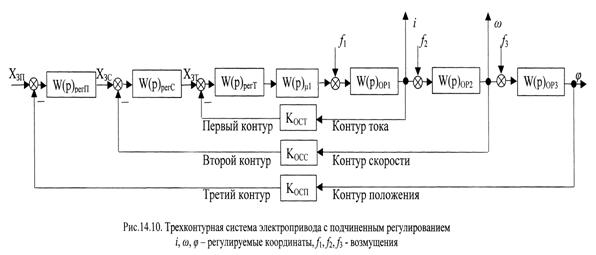
В состав каждого контура входит объект регулирования с передаточной функцией W(p)ор, апериодическое звено с малой постоянной времени W(p)m и регулятор W(p)рег. В результате образуется многоконтурная (2х или 3х-контурная) система подчиненного регулирования, построенная по иерархическому принципу, как показано на рис.6.1.
|