 2015-03-08
2015-03-08 854
854по дисциплине
«Детали машин и основы конструирования»
по теме: «Проектирование привода подъемно-транспортирующей машины, состоящего из открытой _______________ передачи и одноступенчатого ______________ редуктора
Пояснительная записка
КП.ДМ.____.00.000.ПЗ
Проект защищён Выполнил: студент очной
с оценкой___________ формы обучения профиля
«__» __________20__г. «Технический сервис в АПК»
группы И – _______
Учебный шифр _________
______________________
«__» _________20____г.
Проверил: ст. преподаватель
Буликова Е.В.
«__» __________20__г.
Ярославль 2015
Содержание
| Введение | ||
| Задание на проектирование | ||
| Кинематический и силовой расчет привода | ||
| 2.1 | Выбор электродвигателя | |
| 2.2 | Разбивка общего передаточного отношения привода по ступеням | |
| 2.3 | Определение кинематических и силовых параметров для каждого вала привода | |
| Расчет зубчатых передач на прочность | ||
| 3.1 | Выбор материалов и допускаемых напряжений | |
| 3.2 | Конструирование зубчатых колес | |
| 4.1 | ||
| 4.2 | Проверочный расчет червячной передачи по контактным напряжениям | |
| 4.3 | Проверка прочности зубьев червячного венца на изгиб | |
| 4.4 | Конструирование червячной передачи | |
| Расчет валов | ||
| 5.1 | Проектный расчет и конструирование валов | |
| Смазка редуктора | ||
| Выбор муфты |
Введение
Непосредственное соединение вала машины с валом электродвигателя возможно лишь в относительно редких случаях, когда частоты вращения этих валов совпадают, например, в приводах центробежных насосов, компрессоров, вентиляторов и пр. для привода медленно вращающихся валов необходима специальная понижающая передача. При выборе оптимального типа передачи нужно учитывать множество факторов: энергетическую характеристику, эксплуатационные условия, закон изменения нагрузки во времени, срок службы, требования к габаритам и массе и т.п. В большинстве случаев такая передача осуществляется в виде редуктора – механизма, состоящего из зубчатых и/или червячных передач. Настоящее пособие позволяет рассчитать 10 типичных конструкций редукторов. Двухступенчатые:цилиндрический рядный, цилиндрический соосный, цилиндрический с раздвоением мощности на ведущем валу, коническо-цилиндрический и червячно-цилиндрический. Одноступенчатые: цилиндрический (прямозубый или косозубый), конический, червячный с верхним или нижним расположением червяка. При выполнении проекта следует заполнять расчётами только те разделы, которые соответствуют полученному заданию. В случае необходимости выполнения дополнительных расчётов, они размещаются на оборотной стороне листа или на дополнительных листах.
1 Задание на проектирование
Спроектировать привод подъемно-транспортирующей машины сельскохозяйственного назначения с одноступенчатым __________________
редуктором (укажите тип редуктора) по следующим данным:
– мощность на выходном валу редуктора Pвых = _____ кВт;
– частота вращения выходного вала редуктора nвых = _____ с-1;
– срок службы Lh = ______ час;
– передача реверсивная, нереверсивная (необходимое подчеркнуть).
Кинематическая схема привода представлена на рисунке 1.1.
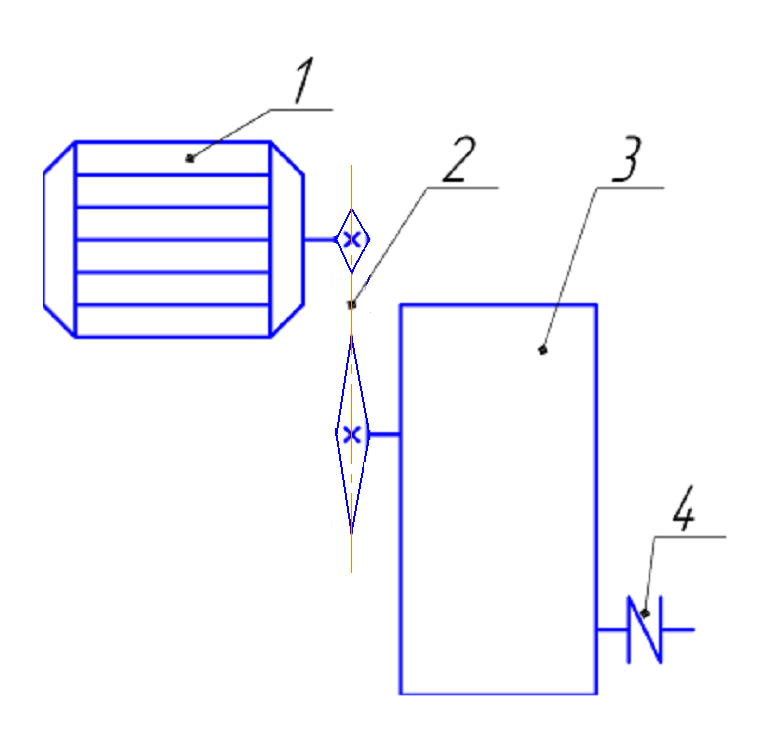
1 – электродвигатель; 2 – открытая передача; 3 – редуктор; 4 – муфта.
Рисунок 1.1 – Кинематическая схема привода
Кинематическая схема редуктора представлена на рисунке 1.2 (см.приложение А).
Рисунок 1.2 – Кинематическая схема редуктора
2 Кинематический и силовой расчет привода
2.1 Выбор электродвигателя
Для выбора электродвигателя необходимо знать:
– условия эксплуатации;
– требуемую мощность;
– частоту вращения вала.
В соответствии с этими данными электродвигатель выбирают по каталогу или соответствующему ГОСТу. Для условий эксплуатации, соответствующих данным курсового проекта, рекомендуется выбирать трёхфазные асинхронные двигатели серии 4А. Они наиболее универсальны. Закрытое обдуваемое исполнение позволяет применять их для работы в загрязнённых условиях, в открытых помещениях и т.п. Необходимую мощность электродвигателя определяют по формуле:

где η – общий КПД, равный произведению КПД всех элементов привода:

где η1 – КПД зубчатой или червячной передачи редуктора, η1 =;
η2 – КПД открытой передачи, η2 =;
η3 – КПД муфты η3 =;
η4 – КПД одной пары подшипников качения η4 =;
m – количество пар опор (валов), m =.
Значения КПД передач различного типа приведены в таблице 2.1.
Таблица 2.1– Значения КПД механических передач
| Тип передачи | Закрытая | Открытая |
| 1.Зубчатая: | ||
| - цилиндрическая | 0,96…0,97 | 0,93…0,95 |
| - коническая | 0,95…0,97 | 0,92…0,94 |
| 2.Червячная при передаточном числе u: | ||
| - свыше 30 | 0,70…0,75 | |
| - от14 до 30 | 0,80…0,85 | |
| - от 8 до 14 | 0,85…0,95 | |
| 3.Цепная | 0,95…0,97 | 0,90…0,93 |
| 4. Ременная: | ||
| - плоским ремнем | 0,96…0,98 | |
| - клиновым ремнем | 0,95…0,97 | |
| Примечания 1. Потери в подшипниках на трение оцениваются следующими коэффициентами: для одной пары подшипников качения ηпк= 0,99…0,995; для одной пары подшипников скольжения ηпс= 0,98…0,99 2. Потери в муфте принимаются ηм≈ 0,98 |

Необходимая мощность электродвигателя согласно формуле 1.1
 кВт
кВт
Номинальная мощность двигателя выбирается по величине, ближайшей большей, к требуемой мощности Ртр.
Каждому значению номинальной мощности соответствует несколько типов размеров двигателей с частотами вращения, синхронными 50с-1 (3000 об/мин); 25с-1 (1500 об/мин); 16,7 с-1 (1000 об/мин); 12,5 с-1 (750 об/мин). Следует учитывать, что двигатели с большей частотой вращения (50 с-1) имеют низкий рабочий ресурс, а двигатели с низкой частотой вращения (12,5 с-1) довольно металлоемки, поэтому их применение нежелательно в приводах общего назначения малой мощности.
Технические данные и основные размеры двигателей приведены в таблицах Г6 и Г7.
Выбираем электродвигатель:
Двигатель 4А_______ ГОСТ 19523-81
Характеристика двигателя:
– мощность Р =____кВт;
– синхронная частота вращения nс = _____с-1;
– коэффициент скольжения S = ______ %.
2.2 Определение передаточных чисел привода
Общее передаточное число привода определяется отношением номинальной частоты вращения двигателя n к частоте вращения приводного вала рабочей машины  :
:
Номинальная частота вращения двигателя
n = nс∙(1 - S), с-1,
где S – коэффициент скольжения;
n = ________________ = ______с-1,
nрм – частота вращения приводного вала рабочей машины.
 ––––– = _____
––––– = _____
Передаточное число привода равно произведению передаточных чисел закрытой up и открытой uоп передач:
u = up∙ uоп.
Для того, чтобы габариты передачи не были чрезмерно большими, нужно придерживаться некоторых средних значений передаточных чисел закрытой и открытой передач, по возможности не доводя их до наибольших, допускаемых лишь в отдельных случаях.
Разбивка передаточного числа привода должна обеспечить компактность каждой ступени передачи и соразмерность ее элементов.
Передаточные числа редукторов рекомендуется брать в соответствии с ГОСТ 2185-70, ГОСТ 12289-76 и ГОСТ 2144-75 (таблица 2.2).
Таблица 2.2– Значения передаточных чисел механических передач
| Закрытые зубчатые передачи (редукторы): - одноступенчатые цилиндрические (ГОСТ 2185-70) | |||||||||||||||||||||||||||
| 1 ряд | 1,25 | 1,6 | 2,5 | 3,15 | 6,3 | ||||||||||||||||||||||
| 2 ряд | 1,12 | 1,4 | 1,8 | 2,24 | 2,8 | 3,55 | 4,5 | 5,6 | 7,1 | 11,2 | |||||||||||||||||
| - одноступенчатые конические (ГОСТ 12289-76) | |||||||||||||||||||||||||||
| 1 ряд | 1,25 | 1,6 | 2,5 | 3,15 | 6,3 | ||||||||||||||||||||||
| 2 ряд | 1,12 | 1,4 | 1,8 | 2,24 | 2,8 | 3,55 | 4,5 | 5,6 | |||||||||||||||||||
| Закрытые червячные передачи (редукторы) одноступенчатые для червяка с числом витков z1=1; 2; 4 (ГОСТ 2144-75) | |||||||||||||||||||||||||||
| 1 ряд | 12,5 | 31,5 | |||||||||||||||||||||||||
| 2 ряд | 11,2 | 22,4 | 35,5 | ||||||||||||||||||||||||
| Цепные передачи: от 2 до 4 Ременные передачи: от 2 до 3 | |||||||||||||||||||||||||||
| Примечание – значение 1-го ряда следует предпочитать значениям 2-го ряда | |||||||||||||||||||||||||||
Принимаем передаточное число редуктора up = _____, тогда передаточное число открытой передачи uоп = u/ up = _____ / _____ = _____
2.3 Определение силовых и кинематических параметров привода
Силовые (мощность и вращательный момент) и кинематические (частота вращения и угловая скорость) параметры привода рассчитывают на всех валах привода по требуемой мощности двигателя Ртр и его номинальной частоте вращения при установившемся режиме.
Вал двигателя:
– мощность Р = Ртр = _____ кВт;
– частота вращения n = _____ с-1;
– угловая скорость ω = 2∙π∙n= _______________= ____ с-1;
– вращательный момент Т = (Ртр ∙103)/ω = ______________= _____ Нм.
Быстроходный вал редуктора:
– мощность Р1 = Ртр∙η2∙η4 = _________________ = ______кВт;
– частота вращения n1 = n/uоп = ________________ = _____ с-1;
– угловая скорость ω1 = ω/uоп = _______________= _____ с-1;
– вращательный момент Т1 = Т∙uоп∙η2∙η4 = ______________= _____ Нм.
Тихоходный вал редуктора:
– мощность Р2 = Р1∙η1∙η4 = _________________ = ______кВт;
– частота вращения n2 = n1/uр = ________________ = _____ с-1;
– угловая скорость ω2 = ω1/uр = _______________= _____ с-1;
– вращательный момент Т2 = Т1∙ uр∙η1∙η4 = ______________= _____ Нм.
Вал рабочей машины:
– мощность Р3 = Р2∙η3∙η4 = _________________ = ______кВт;
– частота вращения n3 = n2 = _____ с-1;
– угловая скорость ω3 = ω2 = _____ с-1;
– вращательный момент Т3 = Т2∙ uр∙η3∙η4 = ______________= _____ Нм.
Результаты расчета кинематических и силовых параметров привода рекомендуется представить в виде таблицы (таблица 2.3).
Таблица 2.3 – Кинематические и силовые параметры привода
| Тип двигателя… | Рном = … кВт; nном = … с-1 (……об/мин) | ||||||
| Параметр | Передача | Параметр | Вал | ||||
| закрытая (редуктор) | открытая | двигате-ля | редук- тора | привод-ной рабочей машины | |||
| быстро-ходный | тихо-ходный | ||||||
| Передаточное число u | Расчетная мощность Р, кВт | ||||||
| Угловая скорость ω, с-1 | |||||||
| КПД η | Частота вращения n, с-1 | ||||||
| Вращаю-щий момент Т, Н∙м |
3 Расчет цепной передачи
3.1 Исходные данные и расчетная схема
Исходные данные:
– передаточное отношение uоп = _____;
– передаваемая мощность ведущей звездочки Р = _____ кВт;
– частота вращения ведущей звездочки n = _____ с-1;
– частота вращения ведомой звездочки n1= _____ с-1;
– вращающий момент на ведущей звездочке Т = _____ Нм;
– режим работы передачи – _______________;
– условия смазывания цепи – ______________;
– угол наклона линии центров β = 0º.
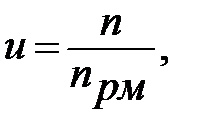
Расчетная схема цепной передачи представлена на рисунке 3.1.
1 – ведущая звездочка; 2 – цепь; 3 – ведомая звездочка
Рисунок 3.1 – Расчетная схема цепной передачи
3.2 Расчет основных параметров передачи
Цепные передачи применяют в основном для понижения частоты вращения ведомого вала. Для этой цели наиболее распространены приводные роликовые цепи однорядные (ПР).
Характеристики цепей приведены в таблице 3.1.
Число зубьев ведущей звездочки

 .
.
Исходя из рекомендаций принимаем z1=_____.


Исходя из рекомендаций, принимаем z2 = ______.
Таблица 3.1–Цепи приводные роликовые однорядные ПР (ГОСТ 13568-75)
| t, мм | b3, мм | d1, мм | d3, мм | h, мм | b7, мм | Q, кН | q, кг/м | Aoп, мм2 |
| 9,525 | 5,72 | 3,28 | 6,35 | 8,5 | 9,1 | 0,45 | 28,1 | |
| 12,7 | 7,75 | 4,45 | 8,51 | 11,8 | 18,2 | 0,75 | 36,6 | |
| 15,875 | 9,65 | 5,08 | 10,16 | 14,8 | 22,7 | 1,0 | 54,78 | |
| 19,05 | 12,7 | 5,94 | 11,91 | 18,2 | 31,8 | 1,9 | 105,8 | |
| 25,4 | 15,88 | 7,92 | 15,88 | 24,2 | 60,0 | 2,6 | 179,7 | |
| 31,75 | 19,05 | 9,53 | 19,05 | 30,2 | 88,5 | 3,8 | ||
| 38,1 | 25,4 | 11,1 | 22,23 | 36,2 | 127,0 | 5,5 | ||
| 44,45 | 25,4 | 12,7 | 25,4 | 42,4 | 172,4 | 7,5 | ||
| 50,8 | 31,75 | 14,27 | 28,58 | 48,3 | 226,8 | 9,7 | ||
| Примечания 1 Расшифровка буквенных обозначений: t – шаг цепи; b3 – расстояние между внутренними пластинами цепи; d1 – диаметр валика; d3 – диаметр ролика; h – высота пластины; b7 – длина валика; Q – разрушающая нагрузка; q – масса одного метра цепи; Аоп – проекция площади опорной поверхности шарнира. 2 Пример условного обозначения однорядной цепи нормальной серии с шагом 9,525 мм, с разрушающей нагрузкой 9,1 кН: Цепь ПР-9,525-9100 ГОСТ 13568-75 |
Требуемый шаг цепи
где T – вращающий момент на ведущей звездочке;
m – число рядов цепи;
[р] – допускаемое давление в шарнирах, в предварительных расчетах [р]=20 мПа, [2];
Кэ – коэффициент эксплуатации.

где Кд − коэффициент динамической нагрузки (см. таблицу 3.2), Кд = _____;
Кβ – коэффициент, учитывающий угол наклона линии центров к горизонту (см. таблицу 3.3), Кβ = _____;
Ксм – коэффициент, учитывающий способ смазки (см. таблицу 3.4),
Ксм = _____;
Крег – коэффициент, учитывающий способ регулирования (см. таблицу 3.5), Крег = _____;
Кр – коэффициент, учитывающий режим работы (см. таблицу 3.6),
Кр = _____.

Таблица 3.2 – Значения коэффициента динамической нагрузки КД
| Характер нагрузки | КД |
| Спокойная | |
| С умеренными толчками | 1,25 |
| Со значительными толчками |
Таблица 3.3 – Значения коэффициента Кβ
| Угол наклона | Кβ |
| до 600 | |
| свыше 600 | 1,25 |
Таблица 3.4 – Значения коэффициента Ксм
| Способ смазки | Ксм |
| Картерный | 0,8 |
| Непрерывный | |
| Периодический | 1,4 |
Таблица 3.5 – Значения коэффициента Крег
| Характер регулирования | Крег |
| Передвигающимися опорами | |
| Нажимными звездочками | 0,8 |
| Нерегулируемые передачи | 1,25 |
Таблица 3.6 – Значения коэффициента КР
| Режим работы | КР |
| Односменная | |
| Двухсменная | 1,25 |
| Трехсменная | 1,5 |

Полученное значение шага цепи округляют в большую сторону согласно ГОСТ 13568-75.
Выбираем цепь: Цепь ПР −_____−_______ ГОСТ 13568−75
Скорость цепи
 , м/с,
, м/с,

Окружная сила
 , H
, H
Давление в шарнирах
где [р] – допускаемое давление в шарнирах (таблица 3.7), [р] = _______
Таблица 3.7– Допускаемое давление в шарнирах роликовых цепей [p], МПа
| Шаг цепи t, мм | Частота вращения малой звездочки n, с-1 | |||||||
| 0,83 | 3,33 | 6,67 | 13,3 | 16,67 | 26,67 | |||
| 12,7; 15,875 | 31,5 | 28,5 | 22,5 | 18,5 | ||||
| 19,05; 25,4 | 23,5 | 17,5 | ||||||
| 37,75; 38,1 | 18,5 | 16,5 | - | |||||
| 44,45; 50,8 | 17,5 | - | - | - |

Если условие p ≤ [p] не выполняется, следует просчитать варианты:
а) с цепью большего шага;
б) с увеличением рядов цепи.
Оптимальное межосевое расстояние из условия долговечности цепи


Межосевое расстояние в шагах

Число звеньев цепи


Принимаем число звеньев Lt=______.
Уточнённое значение межосевого расстояния
Принимаем 
Фактическое межосевое расстояние


Длина цепи

Диаметр делительных окружностей звездочек
Диаметры окружностей выступов звездочек

где d3− диаметр ролика (см. таблицы 3.1 и 3.2), d3 = ______


 ______ мм
______ мм
Диаметры окружностей впадин звездочек

 _______ мм
_______ мм

 ________ мм
________ мм
4.3 Расчет нагрузки на валы
Центробежная сила
где q – масса одного метра цепи (таблицы 3.1 и 3.2), q = ______.

Сила от провисания цепи

где Кf – коэффициент провисания цепи (таблица 3.8), Кf = ______.
Таблица 3.8 – Значения коэффициента провисания цепи Кf
| Расположение линии центров | Кf |
| Горизонтальная передача | |
| Угол наклона <450 | |
| Вертикальная передача, 900 |

Нагрузка на валы определяется по формуле

где Кb − коэффициент нагрузки (таблица 3.9), Кb= ______.
По этой формуле в расчет принимается большая из сил F0 или Fv.
Таблица 3.9 – Значения коэффициента нагрузки Кb
| Расположение линии центров | Кb |
| β<400 | 1,15 |
| 900<β<400 | 1,05 |
| Примечание: при ударной нагрузке Кb увеличивают на 15% |

Результаты расчета цепной передачи представлены в таблице 3.10.
Таблица 3.10 – Результаты расчета цепной передачи
| Параметр | Значение |
| Частота вращения ведущей звездочки n, c-1 | |
| Тип цепи | |
| Шаг цепи t, мм | |
| Межосевое расстояние а, мм | |
| Длина цепи L, мм | |
| Число звеньев Lt | |
| Число зубьев звездочки: – ведущей z1 – ведомой z2 | |
| Сила давления цепи на вал Fb, H | |
| Диаметр делительной окружности звездочек, мм: – ведущей d1 – ведомой d2 | |
| Диаметр окружности выступов звездочек, мм: – ведущей da1 – ведомой da2 | |
| Диаметр окружности впадин звездочек, мм: – ведущей df1 – ведомой df2 | |
| Давление в шарнирах цепи р, МПа |
4 Расчет плоскоременной передачи
Для ременных передач расчёт по тяговой способности является основным расчетом.
Проектный расчёт передачи сводится к определению толщины ремня и геометрических параметров передачи (диаметры шкивов, межосевое расстояние).
4.1 Исходные данные и расчетная схема
Исходные данные:
– передаваемая мощность на ведущем шкиве Р= _____ кВт;
– частота вращения ведущего шкива n = ______ с-1;
– частота вращения ведомого шкива n1 = ______с-1;
– вращающий момент на ведущем шкиве Т = ______ Нм;
– передаточное отношение плоскоременной передачи uоп = ______;
– геометрическое расположение передачи в пространстве (угол наклона линии центров) β = _____;
– режим работы передачи – __________________.
Расчётная схема представлена на рисунке 4.1.
| d1 |
| d2 |
| a |
Рисунок 4.1
4.2 Расчёт основных параметров передачи
Определяем диаметр ведущего шкива:
Полученный диаметр округляем до стандартного значения.
Принимаем  =_______мм.
=_______мм.
Определяем диаметр ведомого шкива
 ,
,
где  - коэффициент проскальзывания,
- коэффициент проскальзывания,  =0,01.
=0,01.
 .
.
Полученный размер округляем до стандартного значения по ГОСТ 17383-73: 40, 45, 50, 56, 63, 71, 80, 90, 100, 112, 125, 140, 160, 180, 200, 224, 250, 280, 315, 355, 400, 450, 500, 560, 630, 710, 800, 900, 1000 и т.д.
Принимаем 
Уточняем передаточное число

Проверяем отклонение от заданного передаточного числа
Определяем межосевое расстояние
Полученное значение межосевого расстояния округляют до значения из стандартного ряда нормальных линейных размеров по ГОСТ 6636-69 (см. таблицу Г1).
Принимаем а = ________ мм.
Определяем угол обхвата ремнём меньшего шкива
Определяем длину ремня

Полученное значение межосевого расстояния округляют до значения из стандартного ряда нормальных линейных размеров по ГОСТ 6636-69 (см. таблицу Г1).
Принимаем L= ________ мм.
Определяем скорость ремня
 ,
,
где  = 25 м/с.
= 25 м/с.

Определяем частоту пробегов ремня
 ,
,
где  - допустимая частота пробегов,
- допустимая частота пробегов,  = 15
= 15  .
.
 .
.
Выполнение этого неравенства условно выражает долговечность ремня и гарантирует срок службы передачи от 1000 до 5000 ч.
Определяем толщину ремня

Выбираем шаг и ширину ремня:
Ремень БКЛН-65 с толщиной одной прокладки  .
.
4.3 Расчёт нагрузки на валы
Определяем допустимую нагрузку на 1 мм ширины прокладки
 ,
,
где  - коэффициент угла обхвата,
- коэффициент угла обхвата,  =________, [2, таблица 5.3.2];
=________, [2, таблица 5.3.2];
 - коэффициент, учитывающий влияние скорости ремня,
- коэффициент, учитывающий влияние скорости ремня,
 ;
;
 - коэффициент режима работы,
- коэффициент режима работы,  =0,9 [1, таблица 5.3.2];
=0,9 [1, таблица 5.3.2];
 - коэффициент, учитывающий угол наклона линии центров к горизонту,
- коэффициент, учитывающий угол наклона линии центров к горизонту,  =_____ [1, таблица 5.3.4].
=_____ [1, таблица 5.3.4].

Определяем число прокладок в ремне
Определяем ширину ремня
 ,
,
где  - окружная сила, Н
- окружная сила, Н

 .
.
Ширину ремня округляем в большую сторону до стандартного значения. Принимаем b= _________мм.
Определяем предварительно натяжение ремня
 ,
,
где  - напряжение от предварительного натяжения,
- напряжение от предварительного натяжения,  =1,8МПа [1, таблица 5.3.1]
=1,8МПа [1, таблица 5.3.1]

Определяем натяжение ветвей ремня:
- ведущей  ;
;
- ведомой 
Определяем напряжение в ведущей ветви от действия силы 

Определяем напряжение изгиба ремня
где E – модуль упругости материала ремня, E=60 МПа

Определяем нагрузки от действия центробежных сил
где  - плотность материала ремня,
- плотность материала ремня,  =1100 кг/м
=1100 кг/м 
 .
.
Определяем суммарное напряжение в ремне

где  - максимально допустимое напряжение в ремне,
- максимально допустимое напряжение в ремне,  =_____ МПа
=_____ МПа
[2, таблица 5.3.1].
 .
.
Определение силы давления на валы

Результаты расчетов открытой плоскоременной передачи представлены в таблице 3.
Таблица 3
| Параметры | Значения |
| Тип ремня | |
| Межосевое расстояние, a мм | |
Толщина ремня,  мм мм
| |
| Ширина ремня, l мм | |
| Длина ремня L, мм | |
Угол обхвата ведущего шкива,  , град , град
| |
Частота пробегов ремня, u, с 
| |
Диаметр ведущего шкива  , мм , мм
| |
Диаметр ведомого шкива,  , мм , мм
| |
Максимальное напряжение  , МПа , МПа
| |
Предварительное напряжение ремня,  , Н , Н
| |
Сила давления ремня на вал,  , Н , Н
|
5 Расчет клиноременной передачи
Клиноременные передачи широко применяются в приводах различных машин, механизмов, станков и т.д.
Расчёт клиноременных передач ведётся из условий тяговой способности и долговечности.
5.1 Исходные данные и расчетная схема
Исходные данные:
– передаваемая мощность на ведущем шкиве Р= _____ кВт;
– частота вращения ведущего шкива n = ______ с-1;
– частота вращения ведомого шкива n1 = ______с-1;
– вращающий момент на ведущем шкиве Т = ______ Нм;
– передаточное отношение плоскоременной передачи uоп = ______;
– геометрическое расположение передачи в пространстве (угол наклона линии центров) β = _____;
– режим работы передачи – __________________.
Расчётная схема представлена на рисунке 5.1.
| d1 |
| d2 |
| a |
Рисунок 5.1
5.2 Расчет основных параметров клиноременной передачи
Расчет клиноременной передачи начинают с выбора сечения ремня. Сечение ремня выбирают по номограмме, представленной на рисунке 5.2, в зависимости от передаваемой мощности и частоты вращения ведущего шкива.
Клиновые ремни нормального сечения Z(0) применяют только для передач мощностью до 2 кВт.
n, с-1 (об/мин)
52,5(3150)
33,3(2000) А
20,8(1250) Б
13,3(800) В
8,3(500)
Г
5(300)
3,3(200) 2 3 5 8 12 20 30 50 Р, кВт
Рисунок 5.2 – Номограмма для выбора сечения клинового ремня
Диаметр ведущего шкива определяется по формуле:
 , мм.
, мм.
Полученный диаметр округляют до стандартного значения.
Стандартный ряд диаметров шкивов (ГОСТ 17383-73 ): 40, 45, 50, 56, 63, 71, 80, 90, 100, 112, 125, 140, 160, 180, 200, 224, 250, 280, 315, 335, 400, 450, 500, 560, 630, 710, 800, 900, 1000 и т.д.
Диаметр ведомого шкива определяется по формуле:
 ,
,
где x – коэффициент проскальзывания, для клиноременных передач обычно принимают x = 0,01… 0,02.

Полученный диаметр также округляют до стандартного значения по ГОСТ 17383-73.
Определение основных параметров передачи выполняется в следующей последовательности.
Определяется фактическое передаточное отношение, проверяется его отклонение от заданного
 ;
;
 .
.

Межосевое расстояние
2∙(d1 + d2) ≥ а ≥ 0,55∙(d1 + d2) + h,
где h – высота сечения ремня (таблица 5.1), h = ______.
2∙(______+ ______) ≥ а ≥ 0,55∙(______ + ______) + ______,
Принимаем а =_______мм.
Длина ремня

Полученное значение длины ремня округляют до стандартного.
Стандартный ряд длин клиновых ремней по ГОСТ 1284.1-89: 400, 450, 500, 560, 630, 710, 800, 900, 1000, 1120, 1400, 1600, 1800, 2000, 2240, 2500, 2800, 3350, 3550, 4000, 4500, и т.д. до 18000.

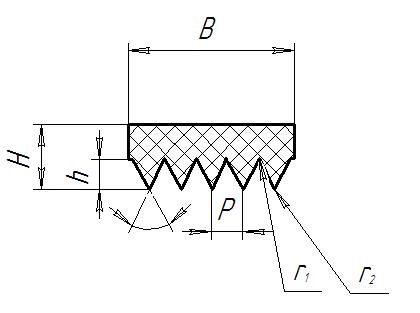
Таблица 5.1 – Основные параметры клиновых и поликлиновых ремней
| Основные размеры | 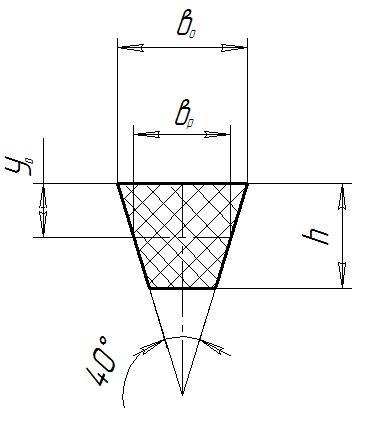
| 
| ||||
| Обозначение сечения ремня | ||||||
| Нормальное сечение | Поликлиновое сечение | |||||
| Z(0) | A | В(Б) | К | Л | М | |
| bР, мм | 8,5 | - | - | - | ||
| b0, мм | - | - | - | |||
| h, мм | 10,5 | 2,35 | 4,85 | 10,35 | ||
| y0, мм | 2,1 | 2,8 | 4,0 | - | - | - |
| площадь сечения А, мм2 | 0,5b | (2H-h) | - | |||
| предельное значение L,мм | 400… | 560… | 800… | 400… | 1250... | 2000… |
| р, мм | - | - | - | 4,5 | 4,8 | 9,5 |
| Н | - | - | - | 9,5 | 16,7 | |
| Масса 1м длины q, кг/м | 0,06 | 0,105 | 0,18 | 0,09 | 0,45 | 1,6 |
| Примечания 1. L – расчётная длина ремня на уровне нейтральной линии. 2. r, r1 – радиусы закруглений сечений поликлиновых ремней: К(0,2; 0,4), Л(0,4; 0,6); М(0,8; 1,0). 3. Z – рекомендуемое число клиньев сечений поликлиновых ремней: К – 2…36, Л – 4…20, М – 2…20. |
Уточненное значение межосевого расстояния по стандартной длине
 , мм.
, мм.


При монтаже передачи необходимо обеспечить возможность уменьшения  на 0,01∙L для того, чтобы облегчить надевание ремня на шкив; для увеличения натяжения необходимо предусмотреть возможность увеличения
на 0,01∙L для того, чтобы облегчить надевание ремня на шкив; для увеличения натяжения необходимо предусмотреть возможность увеличения  на 0,025∙L.
на 0,025∙L.
Угол обхвата ремнем малого шкива
 .
.
Угол обхвата ремнем малого шкива не должен быть меньше 1200.
Скорость ремня
 ,
,
где [V] = 25м/с – для клиновых ремней.

Частота пробегов ремня
 ,
,
где [U] – допускаемая частота пробегов, [U] = 30 с-1.
Соотношение U £ [U] условно выражает долговечность ремня и его соблюдение гарантирует срок службы передачи от 1000 до 5000ч.
Число ремней
 ,
,
где Р – мощность на ведущем валу передачи, кВт;
[Р0] – допускаемая мощность, передаваемая одним клиновым ремнём, кВт (таблица 5.2);
Сa – коэффициент угла обхвата шкивом малого шкива (таблица 5.3);
СZ – коэффициент, учитывающий неравномерность распределения нагрузки между ремнями (таблица 5.4).
СL – коэффициент, учитывающий влияние на долговечность длины ремня (таблица 5.5);
СР – коэффициент режима работы (таблица 5.6).

Полученное значение Z округляют до целого числа.
Z = _______
Таблица 5.2 – Допускаемая мощность [ Р0], передаваемая одним клиновым ремнём (ГОСТ 1284.3-96) в кВт
| Тип ремня | Сечение l0, мм | Диаметр меньшего шкива d1, мм | Скорость ремня V, м/с | |||||||
| Клиновые | Z(0) | – – – – – – | 0,33 0,37 0,43 0,49 0,51 0,54 | 0,49 0,56 0,62 0,67 0,75 0,80 | 0,82 0,95 1,07 1,16 1,25 1,33 | 1,03 1,22 1,41 1,56 1,69 1,79 | 1,11 1,37 1,60 1,73 1,94 2,11 | – 1,40 1,65 1,90 2,11 2,28 | – – – 1,85 2,08 2,27 | |
| А | – – – – – – | 0,71 0,72 0,74 0,80 0,87 0,97 | 0,84 0,95 1,05 1,15 1,26 1,37 | 1,39 1,60 1,82 2,00 2,17 2,34 | 1,75 2,07 2,39 2,66 2,91 3,20 | 1,88 2,31 2,74 3,10 3,42 3,78 | – 2,29 2,82 3,27 3,67 4,11 | – – 2,50 3,14 3,64 4,17 | ||
| В(Б) | – – – – – – | 0,95 1,04 1,16 1,28 1,40 1,55 | 1,39 1,61 1,83 2,01 2,10 2,21 | 2,26 2,70 3,15 3,51 3,73 4,00 | 2,80 3,45 4,13 4,66 4,95 5,29 | – 3,83 4,73 5,44 5,95 6,57 | – – 4,88 5,76 6,32 7,00 | – – 4,47 5,53 6,23 7,07 |
Таблица 5.3 – Значение коэффициента обхвата ремнем малого шкива Сα
| α | ||||
| Сα | 0,95 | 0,89 | 0,82 |
Таблица 5.4 – Коэффициент неравномерности распределения нагрузки между ремнями СZ
| Z | от 2 до 3 | от 4 до 6 | свыше 6 |
| СZ | 0,95 | 0,9 | 0,85 |
Таблица 5.5 – Значения коэффициента длины ремня СL
| L, мм | Сечение ремня | L, мм | Сечение ремня | ||||||
| Z(0) | A | В(Б) | С(В) | Z(0) | A | В(Б) | С(В) | ||
| 0,77 | – | – | – | 1,04 | 0,99 | 0,93 | – | ||
| 0,80 | – | – | – | 1,06 | 1,01 | 0,95 | 0,86 | ||
| 0,81 | – | – | – | 1,08 | 1,03 | 0,98 | 0,88 | ||
| 0,82 | 0,79 | – | – | 1,1 | 1,06 | 1,0 | 0,91 | ||
| 0,84 | 0,81 | – | – | 1,3 | 1,09 | 1,03 | 0,93 | ||
| 0,86 | 0,83 | – | – | – | 1,11 | 1,05 | 0,95 | ||
| 0,90 | 0,85 | – | – | – | 1,13 | 1,07 | 0,97 | ||
| 0,92 | 0,87 | 0,82 | – | – | 1,15 | 1,09 | 0,99 | ||
| 0,94 | 0,89 | 0,84 | – | – | 1,17 | 1,13 | 1,02 | ||
| 0,95 | 0,91 | 0,86 | – | – | – | 1,15 | 1,04 | ||
| 0,98 | 0,93 | 0,88 | – | – | – | 1,18 | 1,07 | ||
| 1,01 | 0,96 | 0,90 | – |
Таблица 3.15 – Значения коэффициента режима работы СР
| Характер нагрузки | СР |
| Спокойная | |
| С умеренными колебаниями | 0,9 |
| Со значительными колебаниями | 0,8 |
| Ударная | 0,7 |
5.3.5 Определение силы давления на валы выполняется в следующей последовательности:
– сила предварительного натяжения одной ветви клинового ремня
 ,
,
где К – коэффициент, учитывающий влияние центробежной силы, принимается по таблице 3.16 в зависимости от сечения ремня.
Таблица 5.6 – Значение коэффициента центробежной силы К
| Сечение ремня | Z(0) | A | В(Б) | С(В) |
| К | 0,06 | 0,1 | 0,18 | 0,3 |

– окружная сила
 .
.
– сила давления на валы
 .
.

5.3 Проверка прочности ремня по максимальным напряжениям
σмах = σ1 + σизг + σu£ [σ]р, МПа,
где σ1 – напряжение растяжения в ведущей ветви, МПа,
 ,
,

σизг – напряжение изгиба в ведущей ветви, МПа;
 ,
,
где Еu – модуль продольной упругости при изгибе, для прорезиненных ремней, Еu=80…100 МПа;
h – высота сечения клинового ремня (см. таблицу 3.10);
σu – напряжения от центробежных сил
σu = r∙V2∙10-6, МПа,
где r – плотность материала ремня, для поликлиновых и клиновых ремней,
r=1250…1400 кг/м3.
σu = ______∙_____2∙10-6 =_________МПа
[σ]р – допускаемое напряжение растяжения, [σ]р=10 МПа.
Если в результате расчётов получается σмах> [σ]р, то следует увеличить диаметр d1 ведущего шкива или выбрать большее сечение ремня и повторить расчёт передачи.
Геометрические размеры шкивов выбираются согласно ГОСТ 20889-88.
Пример условного обозначения шкива для приводных клиновых ремней типа 1 (монолитные с од








