 2015-04-08
2015-04-08 6563
6563Бортовая радиолокационная станция (БРЛС) является автономным радиотехническим средством, позволяющим наблюдать радиолокационное изображение пролетаемой местности и окружающей воздушной обстановки, а так же измерять курсовые углы, и наклонные дальности до ориентиров.
БРЛС может использоваться не только для решения навигационных задач, но и для предотвращения попадания в зоны опасных метеоявлений. В середине ХХ века бортовой радиолокатор был одним из основных средств навигации, но в настоящее время из-за невысокой точности он уступил свое место более точным радионавигационным средствам. Но как средство предотвращения попадания в зоны грозовой деятельности сохранил свое значение. Поэтому на современных ВС БРЛС чаще называют метеонавигационными РЛС (МНРЛС). Некоторые типы БРЛС давали также возможность предотвращения опасных сближений с другими ВС.
БРЛС является автономным средством, а не системой, поэтому ее нельзя, разумеется, отнести к классу угломерных, дальномерных или иных систем. Но с ее помощью место самолета можно определить как угломерным, так и дальномерным или угломерно-дальномерным способом. При этом можно определить пеленги и дальности одновременно нескольких ориентиров
Принцип работы заключается в излучении бортовой антенной электромагнитных импульсов, их отражении от объектов, и приёме отражённых сигналов бортовой антенной.
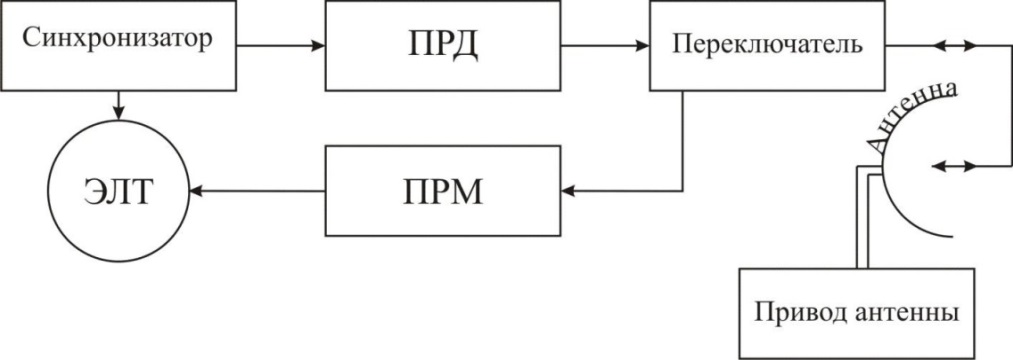
Синхронизатор вырабатывает периодическую последовательность запускающих импульсов, которые поступают на передатчик (ПРД) и ЭЛТ. Под их воздействием передатчик генерирует и излучает через антенну мощные импульсы в сантиметровом диапазоне волн. Одновременно начинается развёртка на ЭЛТ, то есть «линия прицеливания» электронной пушки начинает отклоняться от центра экрана.
Отражённый от объекта импульс принимается через антенну и приёмник (ПРМ), и подаётся на ЭЛТ. В этот момент пушка излучает электроны, образуя пятно на экране трубки. Расстояние отметки объекта от начала развёртки пропорционально времени прохождения сигнала и, следовательно, удалению до объекта
С помощью привода (электродвигателя) антенна сканирует (вращается), излучая импульсы по различным направлениям. В результате послесвечения экрана отметки объектов по всем направлениям сливаются в единое изображение. На экране электронным путём формируются метки дальности, с помощью которых можно определить расстояние до объекта. Одна и та же антенна предназначена как для излучения, так и для приема сигналов. Чтобы мощный излучаемый сигнал не попал в приемник, антенный переключатель отключает приемник от антенны в момент излучения импульса.
Использовались БРЛС как переднего обзора, в которых антенна располагается в носовой части ВС и сканирует вправо-влево в определенном секторе, так и БРЛС кругового обзора, в которых антенна вращается на 360°. В этом случае антенна располагается под фюзеляжем (Ту-134, Ил-76).
Режимы работы. БРЛС «Гроза», как правило, имеет следующие режимы работы.
1. Режим «Готов ». В этом режиме излучение не происходит, но БРЛС готова к работе, все электрические цепи под напряжением.
2. 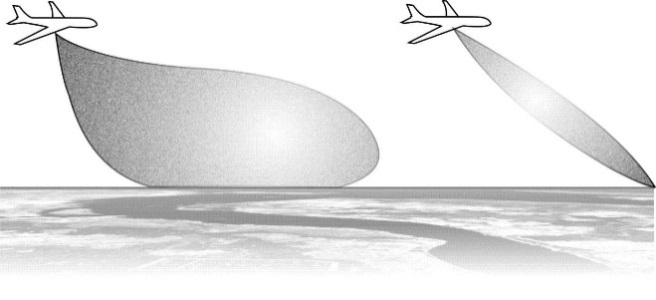 Режим «Земля ». Это основной режим работы для навигации. Антенна наклонена к земле, и на экране можно видеть изображение земной поверхности. Излучение может осуществляться по широкой, или узкой диаграмме направленности. Широкая диаграмма направленности (рис. 9.3), называемая также «косеканс-квадрат» (из-за формулы, ее описывающей), охватывает значительный диапазон дальностей на земной поверхности по направлению ее излучения. Мощность отраженного сигнала от близких и удаленных объектов примерно одинакова. Узкая диаграмма имеет форму луча шириной примерно 3°.Излучаемая мощность по обеим диаграммам одинакова, но в широкой диаграмме она «размазана» по большой площади, а при использовании узкой диаграммы – сконцентрирована по одному направлению. Это дает возможность лучше наблюдать удаленные объекты. Но то, что не попадет в пределы луча, видно не будет.
Режим «Земля ». Это основной режим работы для навигации. Антенна наклонена к земле, и на экране можно видеть изображение земной поверхности. Излучение может осуществляться по широкой, или узкой диаграмме направленности. Широкая диаграмма направленности (рис. 9.3), называемая также «косеканс-квадрат» (из-за формулы, ее описывающей), охватывает значительный диапазон дальностей на земной поверхности по направлению ее излучения. Мощность отраженного сигнала от близких и удаленных объектов примерно одинакова. Узкая диаграмма имеет форму луча шириной примерно 3°.Излучаемая мощность по обеим диаграммам одинакова, но в широкой диаграмме она «размазана» по большой площади, а при использовании узкой диаграммы – сконцентрирована по одному направлению. Это дает возможность лучше наблюдать удаленные объекты. Но то, что не попадет в пределы луча, видно не будет.
На масштабах 30, 50, и 125, используется широкая диаграмма направленности, на масштабе 375 узкая, а на масштабе 200 поочерёдно, узкая и широкая.
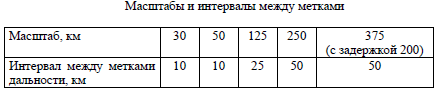
На масштабе 375 км введена задержка развёртки, соответствующая дальности 200 км. Это означает, что в момент излучения импульса развертка сразу не начинается, а начнется лишь в момент, когда пройдет время, соответствующее дальности 200 км. Объект, находящийся на этом удалении, изобразится в центре экрана (в начале развертки). Причем все объекты на этом удалении, находящиеся в разные стороны от ВС, изобразятся в этой же точке. Здесь уже окружность с радиусом 200 км стянется в одну точку. Понятно, что и в этом случае будут искажения формы объектов.
Задержка введена для того, чтобы лучше рассмотреть именно удаленные объекты, пусть даже с искажениями. На экране на масштабе 375 км будут видны только объекты, находящиеся на удалениях от 200 до 375 км.
Нулевое положение наклона антенны должно соответствовать горизонтальной плоскости, антенна удерживается в ней с помощью гировертикали или другого аналогичного устройства. Угол наклона антенны можно изменять в диапазоне +- 10 градусов.
3. Режим «Метео». Предназначен для обнаружения зон грозовой деятельности. Используется узкая диаграмма направленности, и устанавливается наклон антенны равный нулю. Антенна сканирует в горизонтальной плоскости на уровне высоты полета и луч пересекает очаги грозовой деятельности. Они сильно электризованы, хорошо отражают радиоволны и видны в виде ярких засветок. Чем ярче засветка, тем сильнее гроза
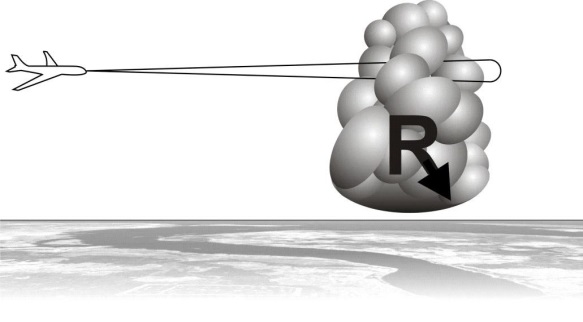
4. Режим «Контур ». То же самое, что и «Метео», но наиболее сильные сигналы полностью подавляются схемой локатора. Это значит, что если мощность отраженного сигнала превышает определенный уровень, то электрическая схема локатора уменьшит ее до нуля – как будто нет никакого отраженного сигнала. Разумеется, на экране в этом месте свечения вообще не будет. Поэтому в режиме «Контур» посередине ярких грозовых засветок будут черные «дырки», как будто бы там нет грозы. На самом деле в этих местах самая сильная грозовая деятельность (рис. 9.7). Данный режим и предназначен для того, чтобы пилот смог выявить самые опасные места.
5. Режим «Снос ». Этот режим предназначен для измерения угла сноса. Используется широкая диаграмма направленности, но сканирование антенны отсутствует.БРЛС можно использовать для определения УС и W.
Для определения W нужно выбрать РЛО вблизи курсовой черты, засечь время движения РЛО от метки до метки (не менее 40 км для хорошей точности) и разделить расстояние между метками на полученное время
Для определения УС необходимо в режиме БРЛС «снос» подобрать такое положение антенны, чтобы мерцания на линии развертки стали как можно медленнее.
 В режиме «Снос» бортового радиолокатора сканирование антенны прекращается. Она останавливается в случайном положении и импульсы излучаются только в одном направлении. Изображение местности исчезает, экран становится темным и на нем видна только яркая линия развертки (рис. 9.12). Точки на этой линии мерцают из-за доплеровских биений частоты. Для наглядности это можно объяснить себе следующим образом (хотя это объяснение и не очень корректно). При движении ВС расположенные на земле РЛТ перемещаются в направлении, обратном направлению вектора путевой скорости, то есть, скорее всего, под каким-то углом к линии развертки, которая сама направлена случайным образом. Здесь под РЛТ понимаются вообще все точки на земной поверхности. Какие-то из них ярче, какие-то слабее. Эти РЛТ хаотично пересекают линию развертки, что и создает мерцания.
В режиме «Снос» бортового радиолокатора сканирование антенны прекращается. Она останавливается в случайном положении и импульсы излучаются только в одном направлении. Изображение местности исчезает, экран становится темным и на нем видна только яркая линия развертки (рис. 9.12). Точки на этой линии мерцают из-за доплеровских биений частоты. Для наглядности это можно объяснить себе следующим образом (хотя это объяснение и не очень корректно). При движении ВС расположенные на земле РЛТ перемещаются в направлении, обратном направлению вектора путевой скорости, то есть, скорее всего, под каким-то углом к линии развертки, которая сама направлена случайным образом. Здесь под РЛТ понимаются вообще все точки на земной поверхности. Какие-то из них ярче, какие-то слабее. Эти РЛТ хаотично пересекают линию развертки, что и создает мерцания.
Клавишами управления антенной, которые расположены слева от экрана, линию развертки (направление антенны) можно направить в любую сторону. Задача пилота – подобрать такое положение антенны, чтобы мерцания на линии развертки стали как можно медленнее, желательно, чтобы почти остановились. Это положение антенны будет соответствовать направлению вектора путевой скорости. Ведь тогда ориентиры будут не пересекать линию, создавая мерцания, а довольно медленно двигаться вдоль нее.
Угол сноса – это угол между вектором истинной скорости, который направлен по курсовой черте, и вектором путевой скорости, который направлен по подобранному положению развертки. Его можно просто отсчитать по шкале курсовых углов на краю экрана. Точность такого способа определения УС невелика, СКП составляет 2-3°. Но на тех ВС, на которых не установлен ДИСС, но установлена БРЛС, это основной способ определения УС.
Запуск БРЛС - через 3 минуты после прогрева, можно перевести в режим Земля. Перед эти необходимо убедиться в отсутствии людей и крупных объектов в секторе +-180 градусов на удалении объектов. Отрегулировать яркость экрана и меток дальности. Медленно вращать кремальеру "Частота" добиться появления меток на эране. Затем установить режим Метео и поднять антенну вверх до пропадания меток объекта. Отключить БРЛС.
Наблюдаемые на экране объекты разделяются на радиолокационные точки и радиолокационный ориентир. РЛТ - это любой объект наблюдаемый на экране. РЛО - это опознанный объект с известным положением на земной поверхности. Вид объектов на экране БРЛС зависит от отражающей способности, направления облучения и других факторов. Поэтому РЛИ местности может не полностью соответствовать её визуальному виду и изображению на карте.
Равнинная местность слабая равномерная засветка. Водные объекты - темные пятна. Горная местность - ярки темные полосы, пятна. Города и крупные населенные пункты - светлые пятна разной яркости. Острова - светлые объекты на темном поле.
Способ половинной дальности. Существует способ, называемый базисным способом, с помощью которого можно определить одновременно W и УС по КУО и D любого ориентира, измеренным в два разных момента времени. Формулы расчета этим способом несколько громоздки для расчета на НЛ-10, поэтому в данном учебном пособии не приводятся. Но частный случай этого способа, называемый способом половинной дальности, может быть легко реализован на практике.
«Частным» этот случай является потому, что ориентир должен находиться не в любом месте экрана, а вблизи курсовой черты. Кроме того, дальность D2 во второй момент времени должна быть вдвое меньше дальности D1 в первый момент времени. Эти допущения позволяют значительно упростить расчетные формулы.
Пилот должен выбрать подходящий ориентир и две метки дальности такие, что дальность второй метки равна половине первой (например, 100 км и 50 км).
При прохождении первой метки дальности включается секундомер и записывается курсовой угол ψ1 и дальность D1. При прохождении ориентиром второй метки секундомер останавливается, и фиксируются ψ2 и D2. За пройденное время изменится не только дальность, но и курсовой угол ориентира, поскольку ВС из-за угла сноса летит не в направлении курсовой черты. Путевая скорость рассчитывается обычным способом по пройденному за измеренное время расстоянию на НЛ-10 или, с учетом того, что D1=2D2, по формуле
W=(D1-D2)/t = D2/t.
Угол сноса α определяется по простой формуле
α= 2 ψ1 - ψ2.
Приведем пример расчета УС таким способом.
Пусть ψ1 = 358°= -2°, ψ2=354°= -6°.
Тогда УС= 2(-2)-(-6)=+2°.

