 2015-04-12
2015-04-12 1920
1920Системы, состоящие из двух сельсинов. Обычно сельсины применяют попарно, создав между двумя сельсинами электрические связи. Такие сельсины могут работать в качестве датчиков угла поворота или в качестве элементов дистанционной передачи. Датчиками являются сельсины, работающие в трансформаторном режиме. В дистанционных передачах (угла поворота) используются сельсины, работающие в индикаторном режиме.
Трехфазные синхронизирующие обмотки двух сельсинов соединяют между собой одноименными фазами. Входной сигнал – это угол α поворота ротора - получает сельсин, называемый сельсином-датчиком. Его обмотка возбуждения подключена к однофазной сети переменного тока. В трехфазной обмотке сельсина-датчика индуцируются ЭДС в соответствии с выражениями (8.1). Поэтому по трехфазным обмоткам обоих сельсинов будут протекать переменные токи, возбуждая магнитные потоки.
Трансформаторный режим. Обмотка возбуждения второго сельсина, называемого сельсином-приемником, в этом режиме не подключена под напряжение. Возникающая в ней ЭДС индукции является выходным сигналом сельсина-приемника. Его ротор фиксируется в определенном положении.
Если ротор сельсина-приемника, повернут на угол β относительно осевой линии его обмотки А (см. рис. 8.10), то в его обмотке возбуждения будет наведена переменным магнитным потоком ЭДС
eвых=Em cos(β- α) sin ωt, (8.3)
где α – угол поворота ротора сельсина-датчика, Em - амплитудное значение ЭДС при β = α.
Обычно угол поворота ротора сельсина-приемника фиксируют в положении β =π/2. Тогда
eвых=Em sin α sin ωt,
и амплитуда Em вых ЭДС на выходе сельсина-приемника будет определяться выражением
Еm вых=Em sin | α |.
Для малых значений угла α принимают линейную зависимость
Еm вых=Em | α |.
Изменение знака угла α приводит к изменению фазы ЭДС eвых на угол, равный π. Таким образом, трансформаторный режим работы двух сельсинов аналогичен рассмотренному выше амплитудному режиму работы одного сельсина. Погрешность преобразования угла в ЭДС составляет 5…10΄.
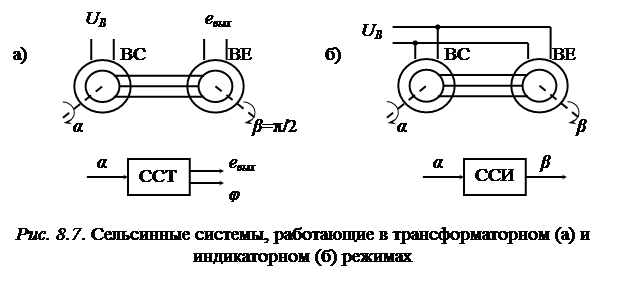
На рис. 8.7а показана функциональная схема системы, состоящей из двух сельсинов, работающих в трансформаторном режиме. На этой схеме изображены сельсин-датчик ВС и сельсин-приемник ВЕ, у которых обмотка возбуждения расположена на статоре, а синхронизирующая трехфазная обмотка - на роторе. Снизу под схемой показаны вход и выходы сельсинной системы (ССТ), работающей в трансформаторном режиме.
 |
Для трансформаторного режима работы часто применяют сельсины, имеющие неявнополюсную конструкцию с распределенными обмотками на статоре и на роторе. Чувствительность примерно равна 1 В/град; погрешность измерения угла составляет ±(20-30)´. В табл. 8.2 приведены технические данные некоторых сельсинов.
| Технические характеристики сельсинов Таблица 8.2 | |||||
| Характеристики | Тип сельсинов-датчиков | Тип сельсинов-приемников | |||
| СГСМ | СБМТ | БД | СМСМ | СТ-2 | |
| Напряжение UB, В Частота, Гц Потребляемая мощность, Вт Масса, кг | 0,24 | - 0,58 | 0,40 | 1,5 0,14 | - 0,14 |
Индикаторный режим. На рис. 8.7б показаны сельсины, работающие в индикаторном режиме (сельсинная система дистанционной передачи угла поворота ССИ). Теперь статорная однофазная обмотка сельсина-приемника ВЕ, как и аналогичная обмотка сельсина-датчика ВС, подключена под переменное напряжение UB, а положение ротора сельсина ВЕ не фиксируется. Он может свободно вращаться на своей оси.
При одинаковом положении роторов сельсинов ВС и ВЕ по отношению к статорным обмоткам возбуждения (β=α) ЭДС индукции (8.3) в соответствующих фазовых обмотках равны между собой и противоположны по направлению. Следовательно, результирующие ЭДС в каждой паре соединенных между собой фазовых обмоток равны нулю, и ток в цепях роторов отсутствует. Равенство фазовых ЭДС будет нарушено, если β≠α. В цепи роторов возникнут токи. Взаимодействуя с магнитными потоками обмоток статоров, они создадут вращающие моменты. Поэтому, если ротор сельсина-датчика после поворота на заданный угол α остановить, то ротор сельсина-приемника под действием вращающего момента будет вращаться до тех пор, пока не встанет в положение β=α. При непрерывном вращении ротора сельсина-датчика с определенной скоростью ротор сельсина-приемника будет вращаться с той же скоростью и «следить» за ротором сельсина-датчика. Вращающий момент обеспечивает синхронность движения роторов, поэтому его называют синхронизирующим моментом. При малых углах рассогласования положений роторов величина синхронизирующего момента определяется формулой
Мсинх=Мm sin(β-α),
где Мm - момент, действующий на ротор при рассогласовании β-α = π/2.
На роторы сельсинов действуют синхронизирующие моменты противоположных направлений. Для сельсина-датчика Мсинх будет тормозным моментом, для сельсина-приемника – движущим. Положение роторов, при котором рассогласование β-α =π и момент Мсинх =0, является неустойчивым.
Под действием синхронизирующего момента устраняется рассогласование положений роторов (β→α) с некоторой погрешностью, на которую влияют скорость вращения, моменты трения в подшипниках и контактных кольцах, неточность балансировки роторов и другие факторы. Эту погрешность обычно определяют экспериментально. Для сельсинов первого и второго классов точности она не превышает 1,5О.
Для передачи углов поворота на расстояние применяют контактные сельсины-датчики типов НД, СТСМ и бесконтактные сельсины-датчики типов БД, СБМ. С датчиками типа НД используются сельсины-приемники типов БС и НС, с датчиками типа БД – бесконтактные сельсины-приемники типа БС. Максимальная статическая погрешность не превышает: ±0,75о для сельсинов I класса точности, ±1,5о для II класса точности, ±2,5о для III класса точности.
Система с дифференциальным сельсином. Дифференциальный сельсин имеет шесть обмоток. Три статорные обмотки, так же как и три роторные обмотки соединены в звезду. Магнитные оси, соединенных в звезду обмоток, сдвинуты относительно друг друга на угол 2 π/ 3.
Дифференциальный сельсин В3 (рис. 8.8а) включают между двумя обычными сельсинами В1 и В2. По существу он обеспечивает возможность введения дополнительного входного сигнала.
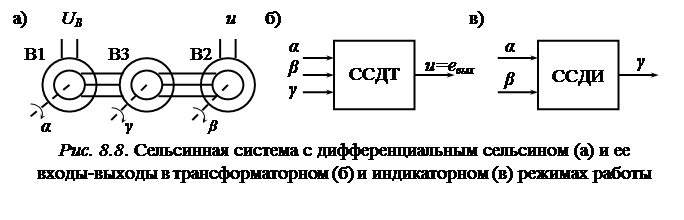
В трансформаторном режиме выходной сигнал u, снимаемый с однофазной обмотки сельсина В2, по аналогии с (8.3) будет определяться выражением
eвых=Em cos(β-α-γ) sin ωt,
где α, β, γ - углы поворота роторов относительно статоров у сельсинов В1, В2, В3 соответственно. Функция дифференциального сельсина отличается от функции обычного сельсина тем, что дифференциальный сельсин является не только сельсином-датчиком (В3), но и осуществляет передачу сигнала к сельсину приемнику (В2) от другого сельсина-датчика (В1).
В индикаторном режиме на однофазные обмотки сельсинов В1 и В2 подается переменное напряжение UB (в этом случае u = UВ на рис. 8.8а). Входными сигналами сельсинной системы (рис. 8.8в) являются углы α и β. Выходной сигнал γ = α + β – угол поворота ротора дифференциального сельсина (В3) равен алгебраической сумме углов поворота роторов сельсинов В1 и В2.
Для алгебраического суммирования угловых перемещений применяют дифференциальные сельсины типов ДИД, НЭД.








