 2015-04-12
2015-04-12 1426
1426Генераторными преобразователями скорости вращения - тахогенераторы (ТГ) постоянного тока, асинхронные и синхронные представляют собой микромашины постоянного или переменного тока, которые работают в генераторном режиме, создавая на выходе электродвижущую силу (ЭДС), величина которой зависит от скорости ω вращения ротора.
Тахогенератор постоянного тока - это электрическая машина постоянного тока с независимым возбуждением (рис. 8.12а) или с возбуждением от постоянного магнита (рис. 8.12б).
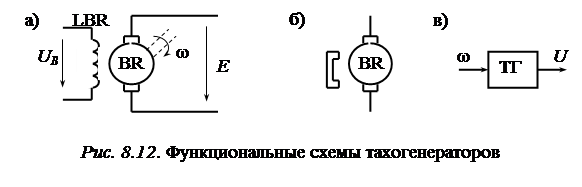 |
Обмотка возбуждения LBR или постоянный магнит создает постоянный магнитный поток Ф в электрической машине. ЭДС на щетках тахогенератора
Е = сеФ ω = к ω,
где се - конструктивная постоянная, к = сеФ = const.
Выходное напряжение U = Е, если сопротивление нагрузки тахогенератора RH = ∞. В этом случае характеристика управления тахогенератора представляет собой линейную зависимость U от ω (наклонная прямая на рис. 8.13). Если же сопротивление нагрузки имеет конечную величину RH < ∞, то линейность преобразования ω→ U нарушается.
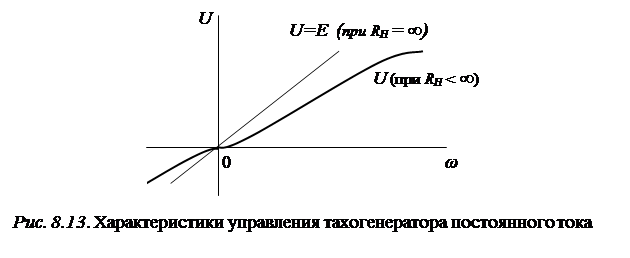
Протекающий в цепи якорной обмотки ток вызывает реакцию якоря. Линейная характеристика искажается, как показано на рис. 8.13. В характеристике управления имеет место нелинейность в зонах малых и больших скоростей. Приближение характеристики управления к линейной зависимости U от ω достигается за счет увеличения сопротивления RH нагрузки. Поэтому приемник сигнала от ТГ должен иметь большое входное сопротивление. Тогда характеристика управления может быть приближенно представлена линейной зависимостью
U = кТГ ω
Постоянный по величине коэффициент кТГ определяется выражением
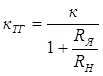 ,
,
где RЯ - сопротивление якорной обмотки и щеточного контакта.
Для уменьшения коллекторных пульсаций напряжения U увеличивают количество пластин коллектора. Якорь выполняют полым, без пазов. Параллельно якорной обмотке подключают конденсатор С для сглаживания пульсаций напряжения. Постоянная времени емкостного фильтра
 ,
,
возрастает с увеличением емкости С. Однако при этом уменьшается полоса пропускания тахогенератора. При частотах сигнала на входе f ω > 1/2π Т амплитудная погрешность напряжения на выходе превышает 3 дБ, а фазовая превышает 45О.
Зависимость выходной величины U от входной величины ω в динамике описывают дифференциальным уравнением
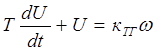 .
.
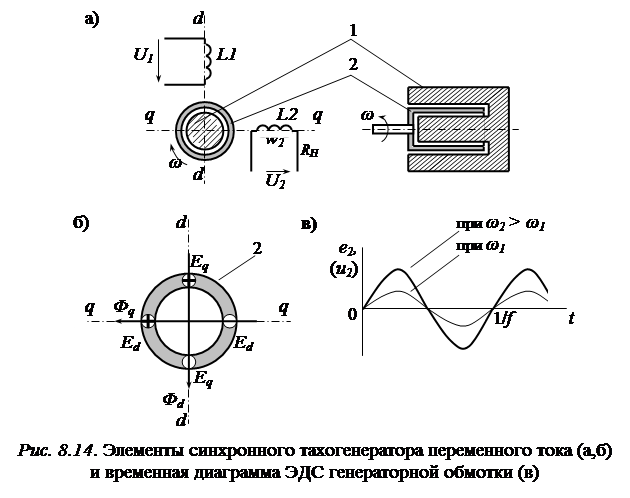
Асинхронный тахогенератор переменного тока выполнен на базе асинхронной двухфазной машины. На статоре 1 имеются две обмотки с взаимно перпендикулярными осями: обмотка возбуждения L1, расположенная по оси d - d, и выходная (генераторная) обмотка L2, расположенная по оси q – q (рис. 8.14а).
Обмотка возбуждения L1 подключается под переменное напряжение U1 чатотой f равной 50 Гц или 400 Гц. С генераторной обмотки L2 снимается выходной сигнал – переменное напряжение U2 частотой f. Амплитуда Um2 напряжения U2 зависит от уловой скорости ω вращения ротора.
Для уменьшения момента инерции ротор 2 выполняется тонкостенным в виде стакана из немагнитного проводникового материала (обычно алюминиевого сплава). Внутри ротора размещается неподвижный шихтованный сердечник по которому замыкаются магнитные потоки.
Принцип действия асинхронного тахогенератора состоит в следующем.
Обмотка возбуждения L1 создает вдоль оси d - d переменный магнитный поток Фd (на рис. 8.14б показан стрелкой, направленной по оси d - d). Поток Фd пульсирует с частотой f, изменяя направление через каждые 1/2 f секунды. В роторе индуцируется трансформаторная ЭДС Ed (на рис. 8.14б показанна с помощью кружков). Возбуждаемый этой ЭДС магнитный поток, как составляющая потока Фd, действует вдоль оси d - d и поэтому не вызывает появление ЭДС в генераторной обмотке.
При вращении ротора (ω=const) в магнитном поле с переменным потоком Фd в роторе возникает ЭДС вращения
Eq = ceФd ω (8.4)
(на рис. 8.14б показанна с помощью кружков). ЭДС Eq и вызванный ею ток в роторе изменяются с частотой f. Они обусловливают появление переменного магнитного потока Фq, действующего вдоль оси q-q (на рис. 8.14б показан стрелкой, направленная по оси q-q). В генераторной обмотке L2 потоком Фq индуцируется переменная ЭДС
e2 (t)= Em2 (ω)sin(2π f t), (8.5)
амплитуда Em2 (ω) которой пропорциональна, согласно (8.4), угловой скорости ω вращения ротора тахогенератора. При изменении знака ω, т.е. направления вращения ротора, фаза e2 (t) изменяется на 180О. На рис. 8.14в показаны выходные сигналы тахогенератора для двух разных значений ω при одинаковом направлении вращения ротра тахогенератора.
Подключение нагрузки к генераторной обмотке тахогенератора может вызвать существенные амплитудные и фазовые искажения выходного сигнала. Поэтому на практике обычно используют тахогенератор в режиме, близком к холостому ходу. Такой режим реализуют, например, соединяя нагрузку с тахогенератором через эмиттерный повторитель, обладающий высоким входным сопротивлением. В такой схеме удается согласовать тахогенератор даже с низкоомной нагрузкой.
Характеристику управления тахогенератора представим в виде
U2=KТГ | ω |,
где U2 - напряжение на выходе тахогенератора, КТГ – передаточный коэффициент, имеющий размерность В∙с.
Полоса пропускания асинхронного тахогенератора ограничена частотой питающей сети. Поэтому для быстродействующих систем используются тахогенераторы с повышенной частотой питания. По сравнению с тахогенераторами постоянного тока асинхронные тахогенераторы имеют существенно меньший передаточный коэффициент. Амплитудная погрешность асинхронного тахогенератора менее 0,5%.
Синхронный тахогенератор представляет собой микромашину, подобную синхронному генератору, у которой ротор – постоянный магнит. В простейшей конструкции синхронного тахогенератора предусматривается одна генераторная обмотка.
При вращении ротора с угловой скоростью ω магнитный поток в обмотке изменяется по синусоидальному закону. Индуцируемая в генераторной обмотке переменная ЭДС
eГ (t)= EmГ (ω)sin(ωt), (8.6)
изменяется с частотой ω, полностью определяемой скоростью вращения ротора. Амплитуда EmГ (ω) ЭДС пропорциональна скорости вращения. При изменении угловой скорости вращения ротора изменяется и амплитуда и частота ЭДС и напряжения на выходе тахогенератора (рис. 8.15)
 |
Зависимость частоты ЭДС синхронного тахогенератора от угловой скорости вращения ротора является основным недостатком этого аппарата. Другой недостаток – выходной сигнал не содержит информацию о направлении вращения ротора. Эти недостатки устранены в реверсивных синхронных тахогенераторах. В них применяют дополнительные обмотки и электронные устройства в виде фазочувтсвительных схем, которые обеспечивают получение на выходе тахогенератора постоянного напряжения, полярность которого зависит от направления вращения ротора.








