 2015-04-17
2015-04-17 5477
5477Конструктивная схема машины. Синхронные машины выполняют с неподвижным или вращающимся якорем. Машины большой мощности для удобства отвода электрической энергии со статора или подвода ее выполняют с неподвижным якорем (рис. 1.2, а)
Поскольку мощность возбуждения невелика по сравнению с мощностью, снимаемой с якоря (0,3–3%), подвод постоянного тока к обмотке возбуждения с помощью двух колец не вызывает особых затруднений. Синхронные машины небольшой мощности выполняют как с неподвижным, так и с вращающимся якорем.
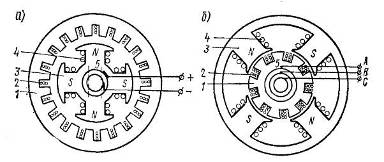
Рис. 1.2 – Конструктивная схема синхронной машины
с неподвижным и вращающимся якорем:
1 – якорь, 2 – обмотка якоря, 3 – полюсы индуктора,
4 – обмотка возбуждения, 5 – кольца и щетки
Синхронную, машину с вращающимся якорем и неподвижным индуктором (рис. 1.2, б)называют обращенной.
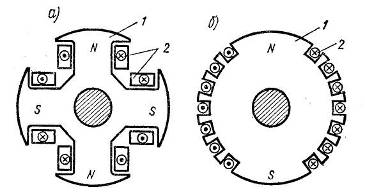
Рис. 1.3 – Роторы синхронной явнополюсной (а) и неявнополюсной (6) машин:
1 – сердечник ротора, 2 – обмотка возбуждения
Конструкция ротора. В машине с неподвижным якорем применяют две конструкции ротора: явнополюсную – с явно выраженными полюсами (рис. 1.3, а) и неявнополюсную – с неявно выраженными полюсами (рис. 1.3, б). Явнополюсный ротор обычно используют в машинах с четырьмя и большим числом полюсов. Обмотку возбуждения выполняют в этом случае в виде цилиндрических катушек прямоугольного сечения, которые размещают на сердечниках полюсов и укрепляют при помощи полюсных наконечников. Ротор, сердечники полюсов и полюсные наконечники изготовляют из стали. Двух- и четырехполюсные машины большой мощности, работающие при частоте вращения ротора 1500 и 3000 об/мин, изготовляют, как правило, с неявнополюсным ротором. Применение в них явнополюсного ротора невозможно по условиям обеспечения необходимой механической прочности крепления полюсов и обмотки возбуждения. Обмотку возбуждения в такой машине размещают в пазах сердечника ротора, выполненного из массивной стальной поковки, и укрепляют немагнитными клиньями. Лобовые части обмотки, на которые воздействуют значительные центробежные силы, крепят при помощи стальных массивных бандажей. Для получения распределения магнитной индукции, близкого к синусоидальному, обмотку возбуждения укладывают в пазы, занимающие 2 /3 каждого полюсного деления.
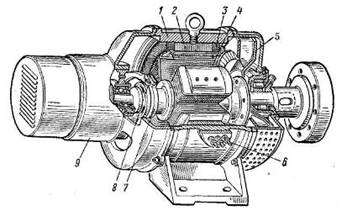
Рис. 1.4 – Устройство явнополюсной машины:
1 – корпус, 2 – сердечник статора, 3 – обмотка статора, 4 – ротор,
5 – вентилятор, 6 – выводы обмотки статора, 7 – контактные кольца,
8 – щетки, 9 – возбудитель
На рис. 1–4 показано устройство явнополюсной синхронной машины. Сердечник статора собран из изолированных листов электротехнической стали и на нем расположена трехфазная обмотка якоря. На роторе размещена обмотка возбуждения.
Полюсным наконечникам в явнополюсных машинах обычно придают такой профиль, чтобы воздушный зазор между полюсным наконечником и статором был минимальным под серединой полюса и максимальным у его краев, благодаря чему кривая распределения индукции в воздушном зазоре приближается к синусоиде.
В синхронных двигателях с явнополюсным ротором в полюсных наконечниках размещают стержни пусковой обмотки (рис. 1–5), выполненной из материала с повышенным удельным сопротивлением (латуни и др.). Такую же обмотку (типа «беличья клетка»), состоящую из медных стержней, применяют и в синхронных генераторах; ее называют успокоительной или демпферной обмоткой, так как она обеспечивает быстрое затухание колебаний ротора, возникающих при переходных режимах работы синхронной машины. Если синхронная машина выполнена с массивными полюсами, то в этих полюсах при пуске и переходных режимах возникают вихревые токи, действие которых эквивалентно действию тока в короткозамкну-тых обмотках. Затухание колебаний ротора при переходных процессах обеспечивается в этом случае вихревыми токами, замыкающимися в массивном роторе.
Пуск синхронного двигателя. Пуск синхронного двигателя сопряжён с трудностями. Если статорную обмотку включить в трёхфазную сеть, а обмотку возбуждения питать от источника постоянного напряжения U в (рис. 4.19), то ротор не сдвинется с места – из-за инерционности ротора вращающееся поле статора не успевает сцепиться с неподвижным полем ротора.
Распространение получил так называемый асинхронный пуск синхронного двигателя. Для осуществления асинхронного пуска ротор синхронного двигателя снабжается специальной пусковой короткозамкнутой обмоткой из медных или алюминиевых стержней типа беличьей клетки асинхронного короткозамкнутого двигателя. Пуск двигателя осуществляют следующим образом (рис. 4.19).
 Вначале обмотка возбуждения синхронного двигателя замыкается на пусковой реостат R п, сопротивление которого в 8 – 10 раз больше, чем сопротивление обмотки возбуждения (если оставить обмотку возбуждения разомкнутой, то в ней при пуске вращающимся полем статора будет наводиться значительная ЭДС, опасная для изоляции). При включении обмотки статора на трёхфазное напряжение двигатель за счёт короткозамкнутой обмотки начинает работать как асинхронный. Когда частота вращения ротора двигателя достигает примерно 95% синхронной частоты вращения поля статора n 0, пусковой реостат R п отключают, а обмотку возбуждения ротора включают на постоянное напряжение U в. Так как теперь частота вращения поля статора отличается незначительно от частоты поля вращающегося ротора, полюсы полей статора и ротора вступают во взаимодействие, двигатель втягивается в синхронизм и начинает работать как синхронный. В рабочем, т.е. в синхронном, режиме токи в пусковой короткозамкнутой обмотке не возникают и она в работе машины не участвует. Однако при кратковременных толчках механической нагрузки на валу в пусковой обмотке токи наводятся и создают момент, демпфирующий колебания ротора.
Вначале обмотка возбуждения синхронного двигателя замыкается на пусковой реостат R п, сопротивление которого в 8 – 10 раз больше, чем сопротивление обмотки возбуждения (если оставить обмотку возбуждения разомкнутой, то в ней при пуске вращающимся полем статора будет наводиться значительная ЭДС, опасная для изоляции). При включении обмотки статора на трёхфазное напряжение двигатель за счёт короткозамкнутой обмотки начинает работать как асинхронный. Когда частота вращения ротора двигателя достигает примерно 95% синхронной частоты вращения поля статора n 0, пусковой реостат R п отключают, а обмотку возбуждения ротора включают на постоянное напряжение U в. Так как теперь частота вращения поля статора отличается незначительно от частоты поля вращающегося ротора, полюсы полей статора и ротора вступают во взаимодействие, двигатель втягивается в синхронизм и начинает работать как синхронный. В рабочем, т.е. в синхронном, режиме токи в пусковой короткозамкнутой обмотке не возникают и она в работе машины не участвует. Однако при кратковременных толчках механической нагрузки на валу в пусковой обмотке токи наводятся и создают момент, демпфирующий колебания ротора.
К их недостаткам относятся большая кратность пускового тока, более высокая стоимость по сравнению с реактивными и частично гистерезисными двигателями, значительное снижение момента входа в синхронизм с увеличением момента инерции нагрузки, наличие тормозного (генераторного) момента в процессе пуска двигателя.
зультате взаимодействия поля постоянных магнитов с вращающимся полем статора втягивается в синхронизм.
Синхронизирующие свойства синхронных двигателей характеризуются в основном моментом входа в синхронизм Жвх — максимальным моментом сопротивления нагрузки, при котором двигатель еще втягивается в синхронизм.
Момент входа зависит от крутизны пусковой механической характеристики- М„' в зоне малых скольжений и от момента выхода из синхронизма МВЫх.
Исследовать синхронизирующие свойства двигателя: а) определить моменты входа в синхронизм УИВХ и выхода из синхронизма Л1ВЫХ при и=И„ и 0,85 Uu', б) определить моменты входа а синхронизм для двух различных моментов инерции нагрузки (•/Harp ~2.
Рассчитать кратности моментов (начального пускового, выхода из синхронизма и входа в синхронизм) и кратность пускового тока по отношению 'К номинальным данным: /г„==Л1к/Л1н; kM =
Синхронизирующие свойства СДПМ определяются в основном такими техническими показателями, как момент входа в синхронизм Мвх и момент выхода из синхронизма УИВЫх.
Момент входа определяется максимальным моментом -нагрузки, при котором двигатель еще втягивается в синхронизм; момент выхода — моментом нагрузки, при котором двигатель вы-вадает из синхронизма.
Для этого синхронно работающий двигатель нагружают до выхода из синхронизма (при этом определяется максимальный синхронизирующий момент Мвых).
Основной технический показатель, определяющий синхронизирующие свойства СДПМ, — момент входа в синхронизм.
Что понимается под моментом входа двигателя в синхронизм?
Какие факторы влияют на момент входа двигателя в синхронизм?
Втягивание СРД в синхронизм происходит под действием синхронизирующего момента, который создается за счет разности магнитных проводимостей ротора по продольной и поперечной осям вследствие того, что явно выраженные полюса ротора стремятся расположиться по оси вращающегося поля статора.
Синхронизирующие свойства СРД определяются максимальным моментом нагрузки, при котором двигатель еще втягивается в синхронизм, — моментом входа в синхронизм Мвх.
Момент входа зависит от максимально синхронизирующего 'момента (момента выхода из синхронизма МВых), момента инерции вращающихся масс /, крутизны пусковой механической характеристики Мп' и может быть найден из приближенного решения уравнения движения ротора СРД: _____________ где Я=/(ос2/Р — инерционная постоянная вращающихся масс, причем сос = 2я/ — электрическая угловая скорость поля якоря; р — число пар полюсов.
Исследовать синхронизирующие свойства двигателя: а) определить момент входа в синхронизм Л1ВХ и момент выхода из синхронизма Мвых при С=СН\ й=и„ и U = 0,85UH; б) определить моменты входа и выхода при U=UH, С<СН и С>СН.
Рабочие и угловая характеристики двигателя снимаются одновременно при номинальных значениях напряжения питания и емкости конденсатора в диапазоне нагрузок от холостого хода до момента выхода ротора из синхронизма.
Основными техническими показателями СРД, характеризующими его синхронизирующие свойства, являются момент входа в синхронизм и момент выхода из синхронизма, который, кроме того, определяет перегрузочную способность двигателя.
Для этого синхронно работающий двигатель нагружают до выхода из синхронизма, при этом определяют момент выхода.
Момент входа в синхронизм, определяющий синхронизирующие свойства СРД, в значительной мере зависит от напряжения питания.
Объясняется это тем, что момент выхода из синхронизма и крутизна пусковой механической характеристики пропорциональны квадрату питающего напряжения (Л4Вых=?
Для того чтобы нагруженный ротор вошел в синхронизм, синхронизирующие силы должны совершить определенную работу, затрачиваемую на преодоление момента сопротивления нагрузки и увеличение кинетической энергии вращающихся масс.
С возрастанием момента инерции нагрузки кинетическая энергия при синхронной частоте вращения увеличивается и, следовательно, двигатель может втянуть в синхронизм нагрузку с уменьшенным моментом сопротивления.
Дайте определение момента входа в синхронизм и момента выхода из синхронизма.
Так как активное сопротивление ротора велико (SKP>1), то момент максимален при пуске и равен нулю при синхронизме (см.
Преимуществами синхронных гистерезисных двигателей, которые способствовали их быстрому распространению в технике, являются: большой пусковой момент и момент входа в синхронизм, плавность входа в синхронизм — отсутствие рывка, незначительное изменение тока (20—30%) при изменении нагрузки от короткого замыкания (пуск) до холостого хода, сравнительно высокий КПД
Рассчитать кратности момента выхода из синхронизма (до и после подмагничивания) и кратности начального пускового момента и пускового тока kM=-MBMJi/MH; kn=MK/Mn; feiWSK//H
При проведении данного эксперимента необходимо определить начальный пусковой момент Мк — момент при п = 0, момент входа в синхронизм УИвх — максимальный момент, при котором двигатель еще втягивается в синхронизм, и момент выхода из синхронизма Мвых— максимальный момент при синхронной скорости.
При определении рабочих характеристик после подмагничивания необходимо с помощью неоновой лампы следить за тем, чтобы ротор двигателя не выходил из синхронизма, так как даже кратковременный выход ротора из синхронизма приводит к его перемагничива-нию.
При исследовании двигателя после подмагничивания необходимо определить момент выхода из синхронизма и пусковой момент.
При проектировании, производстве и испытании электрических машин возникает необходимость в определении пусковых, максимальных и минимальных моментов у асинхронных и синхронных машин; моментов входа в синхронизм у синхронных машин.
ОПРЕДЕЛЕНИЕ МОМЕНТА ВХОДА В СИНХРОНИЗМ СИНХРОННЫХ ДВИГАТЕЛЕЙ С АСИНХРОННЫМ ПУСКОМ
При расчетах, проектировании и испытаниях синхронных микродвигателей первостепенное значение имеет определение предельного момента нагрузки, при котором происходит надежное втягивание ротора в синхронизм.
входа в синхронизм.
Процесс вхождения ротора синхронного двигателя в синхронизм является переходным электромеханическим процессом и описывает-•ся системой нелинейных дифференциальных уравнений синхронной машины.
Тогда исходным уравнением для исследования процесса вхождения в синхронизм синхронных двигателей <; асинхронным пуском является уравнение движения ротора (абс.
При выполнении этого условия момент входа в синхронизм не зависит от начального угла нагрузки.
5, на момент входа в синхронизм не-явнополюсного синхронного двигателя (а2 = 0).
Исследовать влияние угла сдвига моментно-угловых характеристик (ct = 0; л/4; я/2) на момент входа в синхронизм при Oi=l и а2 = 0,5.
Определить момент входа в синхронизм синхронного реактивного двигателя при а\, равных 0,5; 1,0; 1,5.
В процессе вхождения двигателя в синхронизм угол нагрузки изменяется в широких пределах.
6) является коэффициент предельной нагрузки аЗВх, при котором двигатель еще втягивается в синхронизм.
Исследование влияния коэффициента демпфирования на момент входа в синхронизм проводится для неявнополюсного двигателя.
Определение предельной нагрузки, при которой двигатель ещё втягивается в синхронизм, проводится для трех значений коэффициента демпфирования а\, равных 0,5; 1,0; 1,5.
значений коэффициента а^— (0~\)тм- При этом определяются два граничных значения нагрузки, незначительно отличающихся и удовлетворяющих следующему условию: при меньшей нагрузке двигатель еще втягивается в синхронизм, а при большей — продолжает работать в асинхронном режиме.
За момент входа в синхронизм принимается первое значение нагрузки.
Методика определения предельного коэффициента нагрузки, соответствующего моменту входа в синхронизм, изложена выше.
Методика определения момента входа в синхронизм реактивного двигателя такая же, как в предыдущих опытах.
Этим и объясняется увеличение момента входа двигателя в синхронизм с ростом коэффициента демпфирования.
Теоретически при Мае'->°° или /-»-0 момент входа в синхронизм достигает максимального значения синхронизирующего момента.
Что понимается под моментом входа в синхронизм?
Как зависит момент входа в синхронизм от момента инерции нагрузки?
Исследовать синхронизирующие свойства синхронных двигателей: а) определить моменты входа в синхронизм и выхода из синхронизма СДПМ и СРД; б) исследовать влияние степени возбужденности двигателя на его синхронизирующие свойства.
В процессе вхождения синхронных двигателей в синхронизм при больших моментах инерции нагрузки и малой крутизне пусковой механической характеристики частота вращения ротора может длительно превышать синхронную частоту вращения поля якоря.
Эти характеристики снимаются в диапазоне изменения нагрузки от нуля до момента выхода из синхронизма, Значение нагрузки устанавливается делителем эталонного напряжения.
Затем, уменьшая момент сопротивления, определяют два его значения, незначительно отличающихся и удовлетворяющих следующему условию: при меньшем значении момента нагрузки двигатель втягивается в синхронизм (а>я = шс), а при большем — - продолжает работать в асинхронном режиме (<он<с0о).
Синхронные компенсаторы. Синхронные компенсаторы – это синхронные машины, специально предназначенные для улучшения коэффициента мощности (cos φ) электрической сети. Они работают без механической нагрузки на валу (ток I a мал) в перевозбуждённом режиме (правая ветвь U – образной характеристики Р =0 на рис. 4.20). Поскольку синхронные компенсаторы работают вхолостую и загружены только реактивным током I p, они имеют облегчённую механическую конструкцию и, следовательно, меньшие размеры и массу.
23. Пуск синхронных двигателей. U-образные кривые и рабочие характеристики синхронного двигателя. Синхронный компенсатор.
Пуск синхронного двигателя. Пуск синхронного двигателя сопряжён с трудностями. Если статорную обмотку включить в трёхфазную сеть, а обмотку возбуждения питать от источника постоянного напряжения U в (рис. 4.19), то ротор не сдвинется с места – из-за инерционности ротора вращающееся поле статора не успевает сцепиться с неподвижным полем ротора.
Распространение получил так называемый асинхронный пуск синхронного двигателя. Для осуществления асинхронного пуска ротор синхронного двигателя снабжается специальной пусковой короткозамкнутой обмоткой из медных или алюминиевых стержней типа беличьей клетки асинхронного короткозамкнутого двигателя. Пуск двигателя осуществляют следующим образом (рис. 4.19).
Вначале обмотка возбуждения синхронного двигателя замыкается на пусковой реостат R п, сопротивление которого в 8 – 10 раз больше, чем сопротивление обмотки возбуждения (если оставить обмотку возбуждения разомкнутой, то в ней при пуске вращающимся полем статора будет наводиться значительная ЭДС, опасная для изоляции). При включении обмотки статора на трёхфазное напряжение двигатель за счёт короткозамкнутой обмотки начинает работать как асинхронный. Когда частота вращения ротора двигателя достигает примерно 95% синхронной частоты вращения поля статора n 0, пусковой реостат R п отключают, а обмотку возбуждения ротора включают на постоянное напряжение U в. Так как теперь частота вращения поля статора отличается незначительно от частоты поля вращающегося ротора, полюсы полей статора и ротора вступают во взаимодействие, двигатель втягивается в синхронизм и начинает работать как синхронный. В рабочем, т.е. в синхронном, режиме токи в пусковой короткозамкнутой обмотке не возникают и она в работе машины не участвует. Однако при кратковременных толчках механической нагрузки на валу в пусковой обмотке токи наводятся и создают момент, демпфирующий колебания ротора.
U – образные характеристики. Зависимости I(I в ) при U c = const и Р = const называются U – образными характеристиками. На рис. 4.18 изображены три такие характеристики для случаев Р =0 (режим холостого хода), некоторой мощности P 1>0 P 2> P 1. Минимум тока на характеристиках соответствует активному току, потребляемому двигателем  , левые ветви – перевозбуждённому двигателю и ёмкостному току.
, левые ветви – перевозбуждённому двигателю и ёмкостному току.
При уменьшении тока возбуждения I в уменьшается ЭДС Е 0 и угол  увеличивается
увеличивается  (рис.4.17).
(рис.4.17).
Штриховая кривая АВ на рис. 4.18 представляет собой границу устойчивости, на которой =90°.
Наиболее экономичным для самого синхронного двигателя является режим работы с  , так как двигатель развивает заданную механическую мощность при наименьшем, чисто активном токе статора.
, так как двигатель развивает заданную механическую мощность при наименьшем, чисто активном токе статора.
Обычно в эксплуатации синхронный двигатель перевозбуждают с целью улучшения cos φ сети. Режим перевозбуждения выгоден и тем, что уменьшается угол и возрастает перегрузочная способность двигателя. Вместе с этим следует учитывать, что обмотки статора двигателя рассчитаны на определённый ток  с точки зрения нагрева. Поэтому, чем больше загрузка двигателя активным током I a (определяющим механическую мощность и момент на валу), тем меньше возможности использования двигателя в качестве генератора реактивной (ёмкостной) мощности за счёт реактивной составляющей тока I p.
с точки зрения нагрева. Поэтому, чем больше загрузка двигателя активным током I a (определяющим механическую мощность и момент на валу), тем меньше возможности использования двигателя в качестве генератора реактивной (ёмкостной) мощности за счёт реактивной составляющей тока I p.
Синхронные компенсаторы. Синхронные компенсаторы – это синхронные машины, специально предназначенные для улучшения коэффициента мощности (cos φ) электрической сети. Они работают без механической нагрузки на валу (ток I a мал) в перевозбуждённом режиме (правая ветвь U – образной характеристики Р =0 на рис. 4.20). Поскольку синхронные компенсаторы работают вхолостую и загружены только реактивным током I p, они имеют облегчённую механическую конструкцию и, следовательно, меньшие размеры и массу.
24. Синхронный компенсатор
Синхронные компенсаторы. Синхронные компенсаторы – это синхронные машины, специально предназначенные для улучшения коэффициента мощности (cos φ) электрической сети. Они работают без механической нагрузки на валу (ток I a мал) в перевозбуждённом режиме (правая ветвь U – образной характеристики Р =0 на рис. 4.20). Поскольку синхронные компенсаторы работают вхолостую и загружены только реактивным током I p, они имеют облегчённую механическую конструкцию и, следовательно, меньшие размеры и массу.
25. Синхронные машины специального назначения. Назначение, конструкция, принцип действия, рабочие характеристики реактивного, гистерезисного синхронного двигателей, шагового электродвигателя.

