 2015-04-17
2015-04-17 3405
3405Шаговые (импульсные) двигатели (ШД) используют обычно в качестве исполнительных двигателей, преобразующих электрические сигналы (импульсы напряжения) в угловые или линейные дискретные (скачкообразные) перемещения (шаги). Наибольшее применение ШД получили в электроприводах с программным управлением.
Различают шаговые двигатели с активным (возбужденным) и реактивным ротором. Шаговые двигатели с активным ротором имеют обмотку возбуждения или выполнены с постоянными магнитами на роторе; шаговые двигатели с реактивным ротором не имеют обмотки возбуждения, а их ротор выполняют из магнитно-мягкого материала. Обмотку управления ШД обычно располагают на статоре и делают одно- или многофазной (чаще трех- или четырехфазной).
Рассмотрим принцип действия шагового двигателя на примере реактивного трехфазною ШД, статор которого имеет шесть явно выраженных полюсов (по два полюса на фазу), а ротор — два полюса (рис. 23.9).
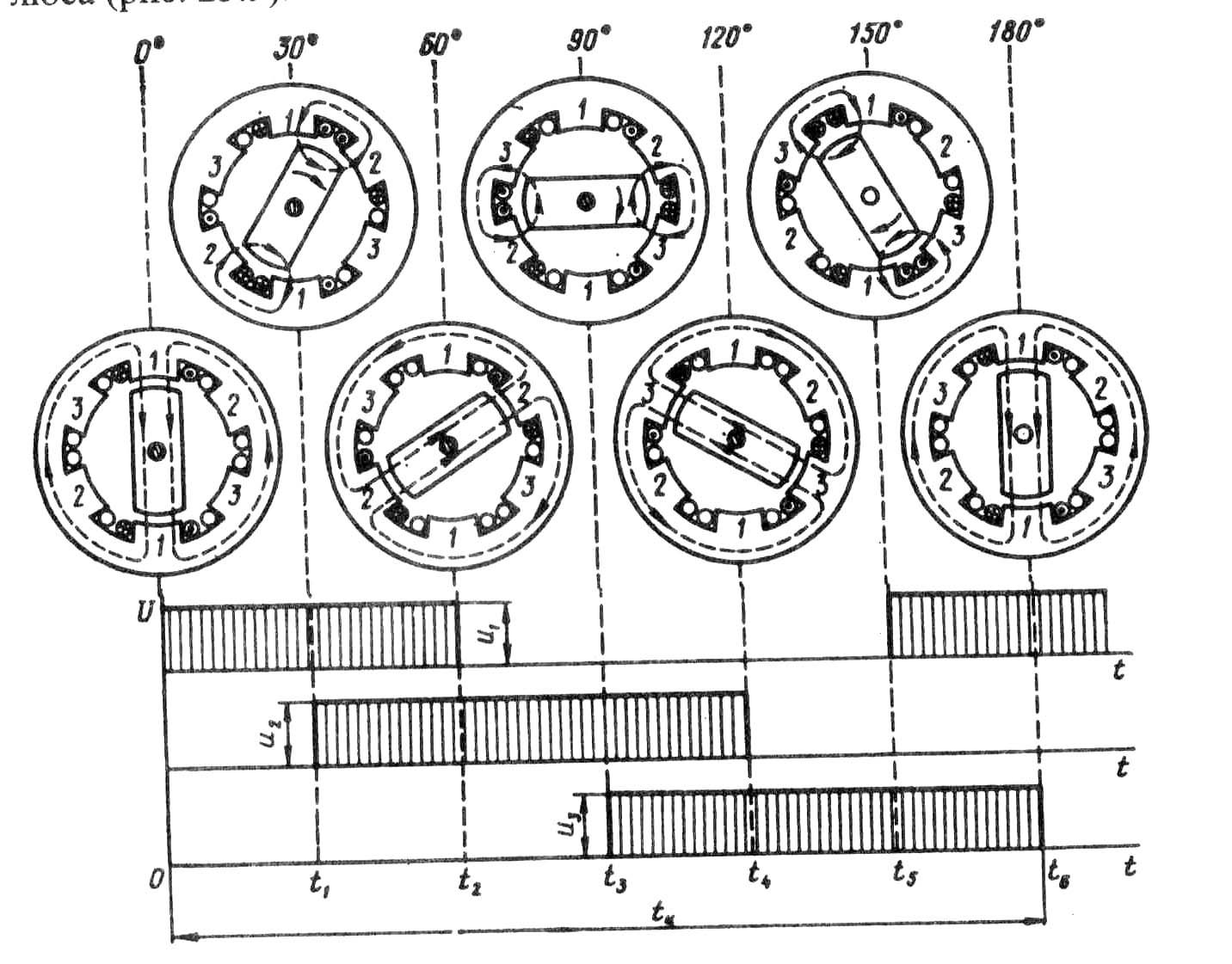
Рис 23.9. Принцип действия реактивного шагового двигателя
При прохождении импульса тока в фазе 1 обмотки управления ротор занимает положение, соответствующее действию электромагнитных сил, т. е. по оси полюсов 1—1. В момент времени  появится импульс тока в фазе 2. При этом на ротор будут действовать силы, обусловленные одновременным воздействием двух МДС (полюсов 1— 1 и 2—2). В результате ротор повернется по часовой стрелке и займет положение, промежуточное между полюсами 1—1 к 2—2, т. е. повернется на шаг
появится импульс тока в фазе 2. При этом на ротор будут действовать силы, обусловленные одновременным воздействием двух МДС (полюсов 1— 1 и 2—2). В результате ротор повернется по часовой стрелке и займет положение, промежуточное между полюсами 1—1 к 2—2, т. е. повернется на шаг  = 30°. В момент
= 30°. В момент  импульс тока в фазе 1 прекратится и ротор, сделав шаг = 30°, займет положение по оси полюсов 2—2. В момент
импульс тока в фазе 1 прекратится и ротор, сделав шаг = 30°, займет положение по оси полюсов 2—2. В момент  появится импульс тока в фазе 3 и ротор, повернувшись еще на 30°, займет положение между полюсами статора 2—2 и 3 — 3. В моменты времени
появится импульс тока в фазе 3 и ротор, повернувшись еще на 30°, займет положение между полюсами статора 2—2 и 3 — 3. В моменты времени  и
и  ротор также будет совершать шаги по 30° и в конце цикла (момент ) займет положение по оси полюсов статора 1—1, совершив за этот цикл поворот на 180°.
ротор также будет совершать шаги по 30° и в конце цикла (момент ) займет положение по оси полюсов статора 1—1, совершив за этот цикл поворот на 180°.
В последующие циклы процессы в ШД будут повторяться. Таким образом, рассматриваемый реактивный трехфазный ШД работает по шеститактной схеме коммутации с раздельно-совместным включением фазных обмоток управления:  .
.
Работают реактивные ШД от однополярных импульсов напряжения, так как изменение полярности этих импульсов не изменяет направления реактивного момента. Для изменения направления вращения ротора рассматриваемого ШД необходимо изменить схему коммутации обмоток, например  ...
...
Если в этом двигателе применить раздельное включение обмоток, т. е. принять схему коммутации 1  2 3 ..., то шаг двигателя = 60°.
2 3 ..., то шаг двигателя = 60°.
Шаг двигателя (град)
 , (23.7)
, (23.7)
где  — число полюсных выступов на роторе; ту — число фазных обмоток управления, пространственно смещенных относительно друг друга;
— число полюсных выступов на роторе; ту — число фазных обмоток управления, пространственно смещенных относительно друг друга;  - коэффициент, определяемый способом включения фазных обмоток управления (при раздельном включении
- коэффициент, определяемый способом включения фазных обмоток управления (при раздельном включении  = 1, при раздельно-совместном —
= 1, при раздельно-совместном —  = 2).
= 2).
Уменьшение шага способствует повышению устойчивости и точности работы ШД Для уменьшения шага увеличивают число полюсных выступов на роторе . Так, если в рассматриваемом двигателе применить ротор крестообразного сечения ( =4), то при шеститактной коммутации шаг = 15°.
Шаговые двигатели с активным ротором (с обмоткой возбуждения или постоянными магнитами на роторе) позволяют получить, большие значения вращающего момента, а также обеспечивают фиксацию ротора при отсутствии управляющего сигнала.
Один из важных параметров ШД — частота приемистости - максимальная частота следования управляющих импульсов, при которой ротор втягивается в синхронизм с места без потери шага. У шаговых двигателей реактивного типа частота приемистости при номинальной нагрузке достигает 1000 — 1300 Гц. С увеличением шага частота приемистости уменьшается. Шаговый двигатель работает в комплекте с коммутатором — устройством, преобразующим заданную последовательность управляющих импульсов в  -фазную систему прямоугольных импульсов напряжения.
-фазную систему прямоугольных импульсов напряжения.
При рассматривании принципа работы шагового двигателя влияние нагрузочного момента на валу двигателя не учитывалось. Если же на вал шагового двигателя действует нагрузочный момент  , то при переключении управляющего импульса с одной фазы на другую МДС статора повернется на угол , а ротор двигателя, поворачиваясь за вектором МДС, будет отставать от него на угол
, то при переключении управляющего импульса с одной фазы на другую МДС статора повернется на угол , а ротор двигателя, поворачиваясь за вектором МДС, будет отставать от него на угол  называемый углом статической ошибки шагового двигателя, эл. град:
называемый углом статической ошибки шагового двигателя, эл. град:

где  — максимальный статический момент, соответствующий углу смещения ротора относительно вектора МДС статора
— максимальный статический момент, соответствующий углу смещения ротора относительно вектора МДС статора  = 90 эл. град.
= 90 эл. град.
Быстродействие шаговых двигателей определяется скоростью протекания электромагнитных процессов при переключении управляющих импульсов напряжения с одной фазы статора на другую. Скорость протекания этих процессов оценивается электромагнитной постоянной времени, с
 ,
,
где  — индуктивность обмотки одной фазы статора, Гн;
— индуктивность обмотки одной фазы статора, Гн;  - активное сопротивление обмотки одной фазы статора, Ом.
- активное сопротивление обмотки одной фазы статора, Ом.
Для повышения быстродействия шагового двигателя в обмотки фаз статора последовательно включают резисторы  , тогда
, тогда

Энергетическим показателем шагового двигателя является значение потребляемой мощности  . Частота вращения шагового двигателя регулируется изменением частоты подачи управляющих импульсов напряжения на фазы обмотки статора.
. Частота вращения шагового двигателя регулируется изменением частоты подачи управляющих импульсов напряжения на фазы обмотки статора.
26.Принцип действия генератора и двигателя постоянного тока.
Принцип действия генератора. Простейший генератор можно представить в виде витка, вращающегося в магнитном поле (рис. 1.4, а, б). Концы витка выведены на две пластины коллектора. К коллекторным пластинам прижимаются неподвижные щетки, к которым подключается внешняя цепь.
Принцип работы генератора основан на явлении электромагнитной индукции. Пусть виток приводится во вращение от внешнего приводного двигателя ПД. Проводники активной части витка пересекают магнитное поле и в них по закону электромагнитной индукции наводятся ЭДС e1 и e2, направление которых определяется по правилу правой руки. При вращении витка по направлению движения часовой стрелки в верхнем проводнике, находящемся под северным полюсом, ЭДС направлена от нас, а в нижнем, находящемся под южным полюсом, – к нам. По ходу витка ЭДС складываются, результирующая ЭДС е = е1– е2.
 Если внешняя цепь замкнута, то по ней потечет ток, направленный от нижней щетки к потребителю и от него – к верхней щетке. Нижняя щетка оказывается положительным выводом генератора, а верхняя – отрицательным. При повороте витка на 180° проводники из зоны одного полюса переходят в зону другого полюса и направление ЭДС в них изменяется на обратное. Одновременно верхняя коллекторная пластина входит в контакт с нижней щеткой, а нижняя – с верхней, направление тока во внешней цепи не изменяется. Таким образом, коллекторные пластины не только обеспечивают соединение вращающего витка с внешней цепью, но и выполняют роль переключающегося устройства, т. е. являются простейшим механическим выпрямителем.
Если внешняя цепь замкнута, то по ней потечет ток, направленный от нижней щетки к потребителю и от него – к верхней щетке. Нижняя щетка оказывается положительным выводом генератора, а верхняя – отрицательным. При повороте витка на 180° проводники из зоны одного полюса переходят в зону другого полюса и направление ЭДС в них изменяется на обратное. Одновременно верхняя коллекторная пластина входит в контакт с нижней щеткой, а нижняя – с верхней, направление тока во внешней цепи не изменяется. Таким образом, коллекторные пластины не только обеспечивают соединение вращающего витка с внешней цепью, но и выполняют роль переключающегося устройства, т. е. являются простейшим механическим выпрямителем.
Принцип действия двигателя. То же устройство работает в режиме электрического двигателя (рис. 1.5), если к щеткам подвести постоянное напряжение. Под действием напряжения U через щетки, пластины коллектора и виток потечет ток i. По закону электромагнитной силы (закон Ампера) взаимодействие тока и магнитного поля В создает силу f, которая направлена перпендикулярно i. Направление силы f определяется правилом левой руки (рис. 1.5): на верхний проводник сила действует вправо, на нижний – влево. Эта пара сил создает вращающий момент Мвр, поворачивающий виток по часовой стрелке. При переходе верхнего проводника в зону южного полюса, а нижнего – в зону северного полюса концы проводников и соединенные с ними коллекторные пластины вступают в контакт со щетками другой полярности.
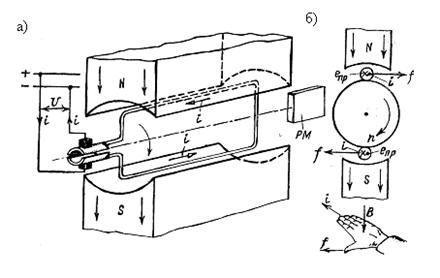
Рис.1.5
Направление тока в проводниках витка изменяется на противоположное, а направление сил f, момента Мвр и тока во внешней цепи не изменяется. Виток непрерывно будет вращаться в магнитном поле и может приводить во вращение вал рабочего механизма (РМ).
Таким образом, коллектор в режиме двигателя не только обеспечивает контакт внешней цепи с витком, но и выполняет функцию механического инвертора, т.е. преобразует постоянный ток во внешней цепи в переменный ток в витке.
Рассмотрение принципа действия показывает, что машина постоянного тока может работать как в режиме генератора, так и в режиме двигателя, т. е. обладает свойством обратимости.
27. Устройство коллекторной МПТ. Основные принципиальные и конструктивные части машины: статор, ротор, индуктор, якорь.
Характерным признаком коллекторных машин является наличие у них коллектора — механического преобразователя переменного тока в постоянный и наоборот. Необходимость в таком преобразователе объясняется тем, что в обмотке якоря коллекторной машины должен протекать переменный ток, так как только в этом случае в машине происходит непрерывный процесс электромеханического преобразования энергии.
К коллекторным машинам постоянного тока относятся двигатель постоянного тока ДПТ и генератор постоянного тока ГПТ которые имеют одинаковую конструкцию и могут заменять друг друга то есть ДПТ может работать как ГПТ и наоборот. Разберем устройство коллекторных машин на примере двигателя постоянного тока. 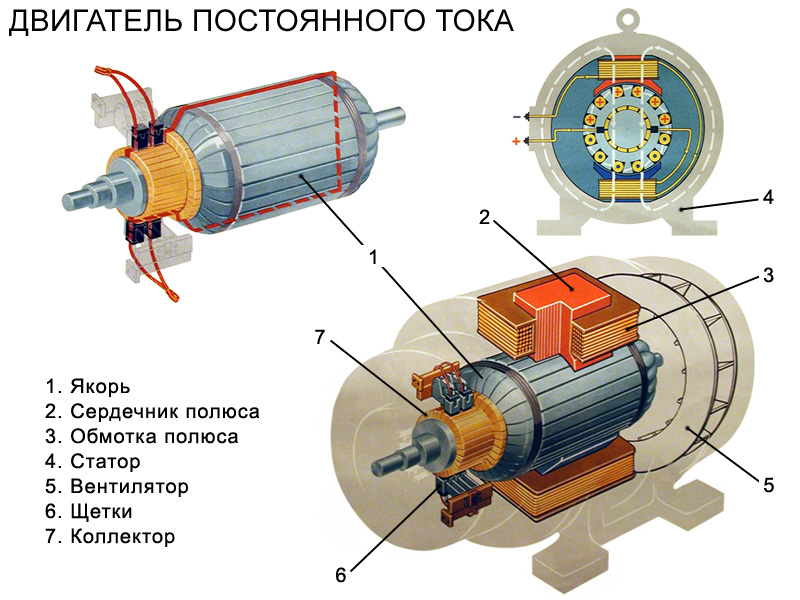
Коллекторная машина постоянного тока состоит из:
1. Якоря (подвижная часть) который состоит из вала,обмотки якоря, коллектора, двух подшипников и сердечника. Сердечник — это цилиндр из штампованных листов электротехнической стали толщиной 0,5 мм покрытых электроизоляционным лаком. Такая сборная конструкция служит для уменьшения вихревых токов. В сердечнике есть пазы в которые вложены пазовые стороны обмотки якоря. 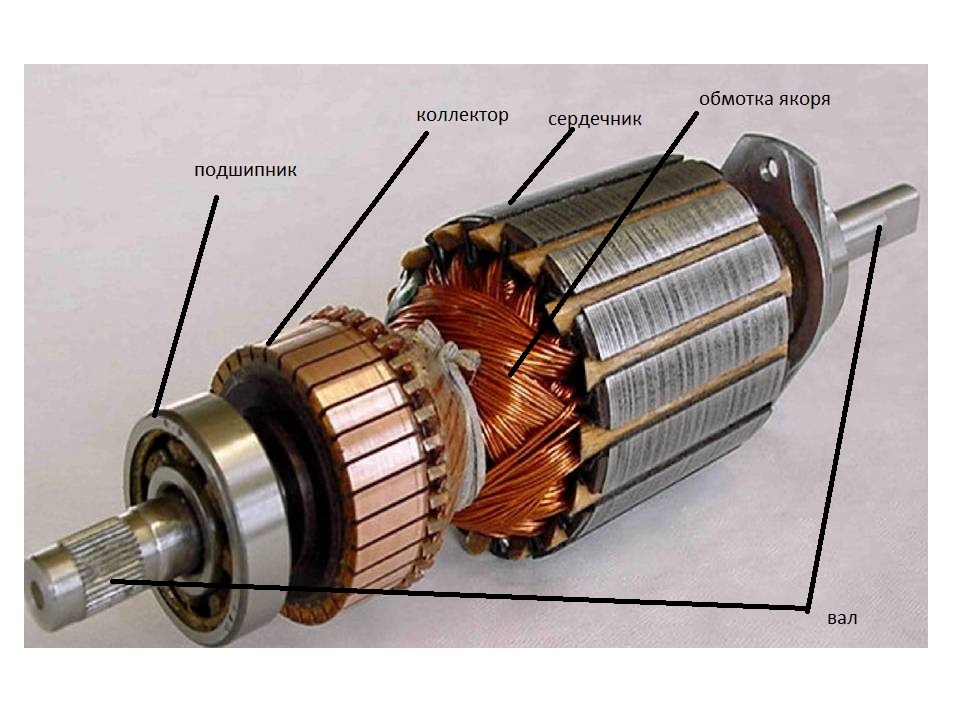
2. Статора (4) (неподвижной части) — станина, главные полюса с полюсными катушками(2,3).
Статор конструктивно может быть выполнен двух видов:
§ сборный — состоит из цельной тянутой трубы и прикреплённым к ней внутри полюсов. Сердечник полюса выполнен в виде стального бруска либо из шихтованных пластин 0,5 — 1 мм. Обмотка полюса намотана вокруг сердечника. Обмотки полюсов соединены между собой последовательно и образуют обмотку возбуждения которая при подключении к источнику постоянного тока создаёт магнитное поле в магнитной системе двигателя.
§ цельный шихтованный - применяется в машинах мощностью 600 Вт и более. Он состоит из из пакета пластин электротехнической стали сложной конфигурации толщиной 0,35 — 0,5 мм.

