 2015-04-01
2015-04-01 6893
6893Системы автоматической регулировки усиления (АРУ) широко используются в радиоприемных устройствах различного назначения. Системы АРУ предназначены для стабилизации уровня сигнала на выходе усилителей радиоприемных устройств при большом динамическом диапазоне изменения входного сигнала, достигающего, например, в радиолокационных приемниках 70 - 100 дБ. При таком изменении уровня входного сигнала, при отсутствии системы АРУ, нарушается нормальная работа приемных устройств, что проявляется в перегрузке последних каскадов приемника. В системах автоматического сопровождения цели РЛС перегрузка каскадов приемника приводит к искажению амплитудной модуляции, к снижению коэффициента усиления и срыву сопровождения. В системах стабилизации частоты перегрузка вызывает изменение крутизны дискриминационной характеристики, что резко снижает качество работы системы [1, 3].
По принципу построения системы АРУ делятся на три основных типа [4]: разомкнутые, или без обратной связи (рис. 5.2, 5.3); замкнутые, или с обратной связью (рис. 5.4); комбинированные. Существуют одно- и многопетлевые системы АРУ с непрерывной и цифровой регулировкой. АРУ без обратной связи обеспечивает высокое постоянство амплитуды выходного сигнала при изменении входного сигнала в широких пределах, однако регулируемая величина зависит от стабильности параметров цепи АРУ.
Разомкнутая инерционная система АРУ (рис. 5.2) имеет в своем составе регулируемый усилитель (У), усилитель системы АРУ (УАРУ), детектор АРУ (ДАРУ) для получения управляющего воздействия и фильтр нижних частот (ФНЧ), устраняющий составляющую частот модуляции во избежание демодуляции АМ- радиосигнала.
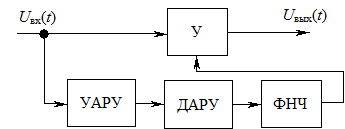
Рис. 5.2 - Структурная схема разомкнутой инерционной системы АРУ
Временная система (рис. 5.3) содержит устройство формирования управляющего напряжения (ВАРУ), работа которого синхронизируется во времени внешним импульсом.
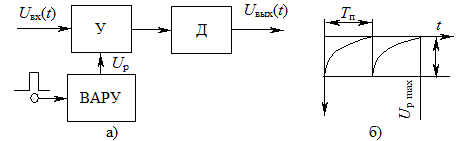
Рис. 5.3 - Структурная схема системы разомкнутой временной АРУ (а) и временная диаграмма, поясняющая принцип ее работы (б)
На практике наибольшее распространение получили инерционные системы АРУ с обратной связью (рис. 5.5). Они подразделяются на системы непрерывного и импульсного действия. Все перечисленные системы могут быть задержанными и незадержанными.
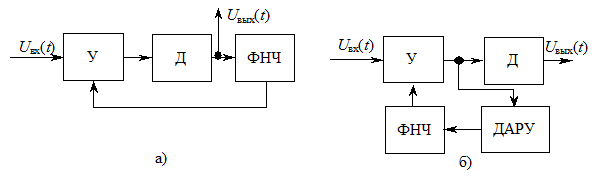
Рис. 5.4 - Структурные схемы систем АРУ непрерывного действия с обратной связью (а) - простая с совмещенным детектированием, (б) – простая с раздельным детектированием
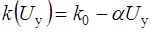
Принцип работы системы АРУ заключается в следующем. Входное напряжение U вх(t) поступает на вход усилителя с регулируемым коэффициентом усиления. Выходное напряжение с усилителя поступает на вход детектора, затем продетектированный сигнал суммируется с напряжением задержки U з. Суммарное напряжение U с усиливается усилителем постоянного тока (УПТ) и подается на фильтр нижних частот (ФНЧ), ФНЧ формирует управляющее напряжение U у, изменяющее коэффициент усиления. Зависимость коэффициента усиления усилителя от управляющего напряжения называют регулировочной характеристикой, она может быть аппроксимирована линейной зависимостью
 , (5.4)
, (5.4)
где k 0 – коэффициент усиления при управляющем напряжении, равном нулю;
a – крутизна регулировочной характеристики.
Эффект стабилизации уровня выходного напряжения U вых(t) достигается за счет того, что с ростом уровня U вых(t) увеличивается и управляющее напряжение U у, под действием которого, в соответствии с выражением (5.1), уменьшается коэффициент усиления усилителя, что приводит к снижению уровня входного сигнала.
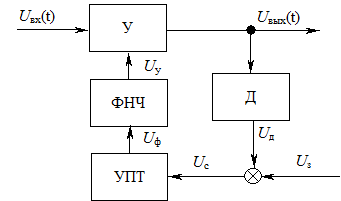
Рис. 5.5 - Функциональная схема системы усиленной задержанной АРУ с обратной связью
Для предотвращения снижения уровня выходного сигнала при малых входных воздействиях и обеспечения работы системы АРУ с определенного уровня, в систему подают напряжение задержки U з. В результате напряжение управления появится только в случае, когда напряжение на выходе амплитудного детектора превысит напряжение задержки U з.
 , если
, если  (5.5)
(5.5)
 , если
, если  ,
,
где K д – коэффициент передачи детектора.
Фильтр нижних частот в цепи обратной связи систем АРУ предназначен для передачи управляющего напряжения с частотами изменения уровня выходного напряжения АРУ. При этом ФНЧ должен быть инерционным по отношению к частотам полезной модуляции, иначе произойдет демодуляция полезного сигнала.
Напряжение на выходе системы АРУ (рис. 5.5)
 . (5.6)
. (5.6)
Уравнениям (5.2) – (5.3) соответствует структурная схема системы АРУ (рис. 5.6). На этой схеме нелинейное звено (НЗ) описывается зависимостью
 (5.7)
(5.7)
В установившемся режиме (при постоянном уровне напряжения на входе системы АРУ) из (5.2) – (5.4) следует:
 при u д < u з;
при u д < u з;
 при u д ³ u з, (5.8)
при u д ³ u з, (5.8)
где k упт – коэффициент усиления УПТ.
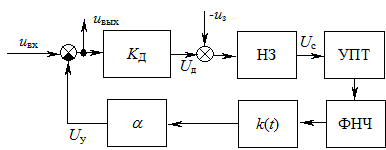
Рис. 5.6 - Структурная схема системы АРУ с обратной связью
Уравнение (5.5) определяет регулировочную характеристику системы АРУ с обратной связью.
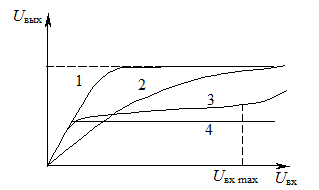
Рис. 5.7 - Амплитудные характеристики системы АРУ
Амплитудные характеристики замкнутой системы АРУ (рис. 5.7) представлены для случаев: 1 – без системы АРУ, 2 – простая АРУ, 3 – задержанная АРУ, 4 – усиленная и задержанная АРУ.

