 2015-04-17
2015-04-17 3701
3701Помимо дальномерных РСДН для определения местоположения самолета используются также разностно-дальномерные РСДН.
Принцип действия разностно-дальномерных РСДН основан на вычислении разности расстояний от самолета до той или иной наземной опорной станции. При этом определение местоположения самолета выполняется с помощью бортовой радиоаппаратуры, которая работает в режиме приема радиосигналов. Достоинством разностно-дальномерных РСДН (в отличие,от дальномерных) РСДН является то, что возможное расхождение между шкалами времени наземной и бортовой радиоаппаратуры не оказывает влияния на точность местоопределения самолета. В дальномерной РСДН требуется, как отмечалось выше, точная синхронизация указанных шкал времени. Недостаток разностно-дальномерных РСДН (по сравнению с дальномерными РСДН) – увеличенное количество опорных станций.
Как известно, если имеются две несовпадающие между собой точки ОС-1 и ОС-2, то геометрическим местом прочих точек той же плоскости, разность стояний которых до ОС-1 и ОС-2 является постоянной величиной, оказываются кривые, называемые гиперболами (рис. 3.54).
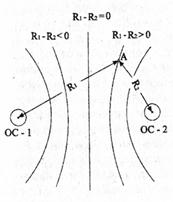 |
| Рис. 3.54. Семейство гипербол для опорных станций ОС-1 и ОС-2 |
Иными словами, если некая точка А будет перемещаться по соответствующей гиперболе, то любое ее местоположение будет характеризоваться соотношением  . Точки ОС-1 и ОС-2 называются фокусами этой гиперболы.
. Точки ОС-1 и ОС-2 называются фокусами этой гиперболы.
Поскольку выражение справедливо для всех точек данной гиперболы, то для, однозначного определения местоположения самолета на плоскости с помощью разностно-дальномерной РСДН необходимо иметь по крайней мере две гиперболы (рис. 3.4.8), описываемых, соответственно, двумя уравнениями: и  . Это означает, что требуется одна фокальная точка – ОС-3.
. Это означает, что требуется одна фокальная точка – ОС-3.
В связи с тем, что разностно-дальномерные РСДН используют в своей практике гиперболические зависимости, их еще называют гиперболическими РСДН.
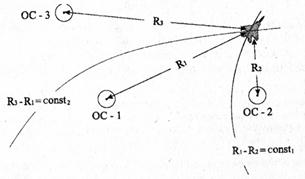 |
| Рис. 3.55. Определение местоположения самолета на плоскости с помощью разностно-дальномерной (гиперболической) РСДН: ОС-1 – первая опорная станция; ОС-2 – вторая опорная станция; ОС-3 – третья опорная станция. |
Фазовая разностно-дальномерная РСДН. В данной РСДН местоположение самолета определяется координатами точки пересечения гипербол, обязанных своим происхождением вычислению разности расстояний между самолетом и той или иной наземной опорной станцией. При этом указанная разность расстояний вычисляется в бортовой аппаратуре фазовым методом, т.е. при помощи использования разности фаз между принятыми радиосигналами и напряжением бортового эталонного генератора.
Обычно в фазовой разностно-дальномерной РСДН используются 3 – 5 опорных станций, одна из которых является ведущей (задает синхронизацию остальных, ведомых, опорных станций). Однако в целях упрощения рассмотрим формирование разности  расстояний
расстояний  и
и  (т. е. величины
(т. е. величины  ) только для двух опорных станций ОС-1 (ведущей) и ОС-2 (ведомой). Упрощенная структурная схема, поясняющая принцип действия фазовой разностно-дальномерной РСБН для этого случая, представлена на рис. 3.56.
) только для двух опорных станций ОС-1 (ведущей) и ОС-2 (ведомой). Упрощенная структурная схема, поясняющая принцип действия фазовой разностно-дальномерной РСБН для этого случая, представлена на рис. 3.56.
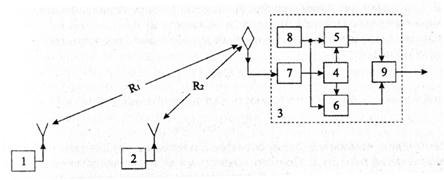 |
| Рис. 3.56. Упрощенная схема, поясняющая принцип действия фазовой разностно-дальномерной РСБН: 1 – первая опорная станция (ОС-1); 2 – вторая опорная станция (ОС-2); 3 – один из каналов бортового оборудования; 4 – коммутатор; 5 – первый измеритель разности фаз; 6 – второй измеритель разности фаз; 7 – радиоприемное устройство; 8 – эталонный генератор; 9 – измеритель разности расстояний и ( ) |
Работа данной РСБН происходит следующим образом.
Первая (ведущая) опорная станция 1 излучает радиосигнал частоты  (10,2 кГц), который принимается антенной бортового оборудования. Поскольку самолет располагается на расстоянии , от опорной станции 1, то принятый радиосигнал может быть записан в виде:
(10,2 кГц), который принимается антенной бортового оборудования. Поскольку самолет располагается на расстоянии , от опорной станции 1, то принятый радиосигнал может быть записан в виде:
 , (3.76)
, (3.76)
где  .
.
Отметим, что излученный опорной станцией 1 радиосигнал одновременно является синхронизирующим для второй (ведомой) опорной станции 2 (канал синхронизации на рис. 3.4.9 не показан). Поэтому опорная станция 2 излучает радиосигнал, когерентный с радиосигналом, ранее излученным опорной станцией 1. Это означает, что радиосигнал, принятый антенной бортового оборудования того же самолета (находящегося на расстоянии от опорной станции 2), может быть записан как
 , (3.77)
, (3.77)
где  .
.
Радиосигналы (3.76) и (3.77) приходят, вообще говоря, в разные моменты времени, поскольку опорные станции 1 и 2 излучают попеременно – в интервале от  и
и  работает первая опорная станция, а вторая опорная станция функционирует в интервале от
работает первая опорная станция, а вторая опорная станция функционирует в интервале от  до
до  ; интервал между и соответствует паузе.
; интервал между и соответствует паузе.
Поскольку моменты  и известны, то в эти моменты бортовой коммутатор 4 переключает бортовые измерители разности фаз – первый измеритель 5 (работает между моментами и ) и второй измеритель 6 (работает между моментами и ).
и известны, то в эти моменты бортовой коммутатор 4 переключает бортовые измерители разности фаз – первый измеритель 5 (работает между моментами и ) и второй измеритель 6 (работает между моментами и ).
На первые входы этих измерителей поступают (через коммутатор 4) с выхода радиоприемного устройства 7 принятые антенной радиосигналы (3.76) и (3.77).
На вторые входы измерителей 5 и 6 разности фаз подается с выхода эталонного генератора 8 напряжение вида
 , (3.78)
, (3.78)
где  – начальная фаза колебания, которая (в силу ослабленных требований к синхронизации генератора 8) является неизвестной.
– начальная фаза колебания, которая (в силу ослабленных требований к синхронизации генератора 8) является неизвестной.
В этом случае измеритель 5 должен будет вычислить разность фаз  колебаний (3.75) и (3.76)
колебаний (3.75) и (3.76)
 , (3.79)
, (3.79)
А измеритель 6 – определить разность фаз  колебаний (3.77) и (3.78)
колебаний (3.77) и (3.78)
 . (3.80)
. (3.80)
Построение измерителей разности фаз 5 и 6 полностью аналогично структуре, приведенной на рис. 3.4.6. Поэтому нахождение и осуществляется в цифровой форме, т.е. на выходах 5 и 6 формируются цифровые коды  и
и  . Эти коды поступают на входы измерителя 9 разности расстояний и .
. Эти коды поступают на входы измерителя 9 разности расстояний и .
Так как цифровые значения и формируются в измерителях 5 и 6 в разные моменты времени, то первой операцией, выполняемой в измерителе 9, является запоминание значения (в цифровой реализации эта операция выполняется достаточно просто). Второй операцией, производимой в измерителе 9, становится нахождение разности 
 , (3.81)
, (3.81)
где  – длина волны радиосигнала частоты
– длина волны радиосигнала частоты  .
.
Как видно из (3.81), данная операция вычитания устраняет зависимость от неизвестной начальной фазы  эталонного генератора 8. Существует лишь единственное требование – фаза должна быть постоянной на интервале измерения. Наконец, в качестве третьей операции осуществляется пересчет по уравнению (3.82) разности расстояний через измеренную разность
эталонного генератора 8. Существует лишь единственное требование – фаза должна быть постоянной на интервале измерения. Наконец, в качестве третьей операции осуществляется пересчет по уравнению (3.82) разности расстояний через измеренную разность
 (3.82)
(3.82)
в цифровой форме, т.е. на выходе измерителя 9 вырабатывается цифровой код  разности расстояний и .
разности расстояний и .
Далее величина , соответствующая параметру одной гиперболы, поступает в бортовую ЭЦВМ, где сравнивается с аналогичной величиной, полученной для первой и третьей опорных станций (см. рис. 3.4.8) и являющейся параметром другой гиперболы, на основании чего указанная бортовая ЭЦВМ вычисляет координаты местонахождения самолета, чаще всего – его долготу и широту.








