 2015-04-17
2015-04-17 1390
1390Спутниковые РСДН относятся к классу глобальных радиосистем, позволяющих определить местоположение самолета практически в любой точке земного шара. К преимуществам спутниковых РСДН относятся также высокая (погрешность определения местоположения самолета составляет 17,8…100 м) точность измерения и малое (6…8 с) время определения местоположения самолета.
Наиболее часто в авиационной практике используется пассивная спутниковая РСДН. Принцип ее функционирования представлен на рис. 3.57.
Искусственный спутник (ИСЗ) осуществляет радиоконтакт как самолетом местоположение которого определяется с помощью данной спутниковой РСДН, так и с наземным командно-измерительным пунктом (КИП). При этом радиосвязь ИСЗ и КИП является двунаправленной, а с самолетом – однонаправленной (от ИСЗ к самолету). При таком (пассивном) варианте реализации спутниковой РСДН сложность, масса и объем радиоаппаратуры, установленной на ИСЗ, оказывается минимальным (в отличие, скажем, от активной спутниковой РСДН, когда радиоконтакт между ИСЗ и самолетом является двунаправленным).
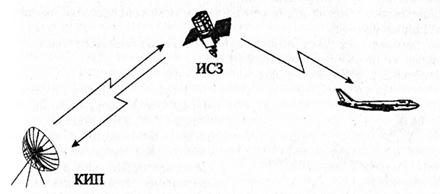 |
| Рис. 3.57. Принцип функционирования пассивной спутниковой РСДН: ИСЗ – искусственный спутник Земли; КИП – командно-измерительный пункт |
В наземном КИП решается ряд задач, основными из которых являются следующие:
- слежение за ИСЗ (с помощью радиосигналов, получаемых от ИСЗ, происходит определение орбит движения ИСЗ, измерение расхождений шкал времени ИСЗ и КИП);
- вычисление эфемерид (координат, рассчитанных для определения момента времени) ИСЗ и предсказание их на будущие моменты времени (равно как и прогнозирование уходов времени на ИСЗ);
- трансляция на ИСЗ сигналов коррекции для эталонных генераторов ИСЗ, ввода поправок времени и параметров орбиты ИСЗ, также различного рода служебной информации.
В свою очередь, ИСЗ передает на КИП свои текущие эфемериды, а также радиосигналы, необходимые для определения местоположения самолета, и служебную информацию.
Наконец, ИСЗ пересылает на самолет радиосигналы, предназначенные для определения местоположения самолета, основными из которых являются следующие:
- кодовые радиосигналы идентификации данного (среди прочих) ИСЗ;
- навигационные (например, фазо-манипулированные) радиосигналы, по которым осуществляется измерение координат самолета;
- радиосигналы эфемерид данного ИСЗ, погрешностей его (ИСЗ) эталона времени, а также так называемого альманаха (содержащего эфемериды всех прочих ИСЗ, входящих в состав используемой спутниковой РСДН), употребляемого при выборе того или иного ИСЗ;
- радиосигналы дополнительных сведений (поправка на ионосферную рефракцию, сведения о «возрасте» то или иной информации, служебная информация и т.д.).
Что касается приемно-измерительной аппаратуры, установленной на борту самолета, то основными задачами ее функционирования являются:
- осуществление радиоконтакта с тем или иным ИСЗ (поскольку количество ИСЗ, находящихся в зоне видимости, обычно составляет 3 – 5 штук, то для обеспечения непрерывности процесса местоопределения самолета используется бортовая самолетная ФАП, каждый из лучей которой осуществляет слежение за соответствующим ИСЗ);
- определение местоположения самолета при помощи обработки принятых от ИСЗ радиосигналов;
- учет временных поправок, обусловленный расхождением шкал времени;
- выполнение поиска того или иного ИСЗ;
- обработка служебной информации.
Отметим, что обычно местоположение самолета (координаты Xc, Yc, Zc) и ИСЗ (X, Y, Z) определяются в геометрической системе координат, начало которой находится в центре земного шара (ЦЗШ) (рис. 3.4.15), ось Х3 направлена к точке пересечения плоскости экватора (ПЭ) с Гринвичским меридианом (ГМ), а ось Z3 – к северному полюсу (СП). Однако, самолетная бортовая радиоаппаратура получает от ИСЗ его координаты в виде эфемерид; поэтому эфемеридные данные ИСЗ пересчитываются на борту самолета в геоцентрическую систему координат.
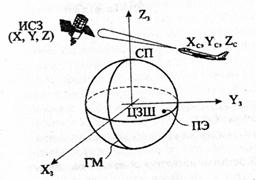 |
| Рис. 3.58. Геоцентрическая система координат: ЦЗШ – центр земного шара; ПЭ – плоскость экватора; ГМ – гринвичский меридиан; СП – северный полюс; X, Y, Z – координаты ИСЗ; Xc, Yc, Zc – координаты самолета |
В большинстве спутниковых РСДН употребляется дальномерный метод местоопределения самолета – в отличие, например, от разностно-дальномерного метода, используемого значительно реже (из-за сложности формирования пространственных гиперболоидов). Основным уравнением дальномерного метода, вычисляющим расстояние R между самолетом и данным ИСЗ, является соотношение (рис 3.58):
 , (3.83)
, (3.83)
где  – ошибка измерения дальности, обусловленная расхождением эталонов времени
– ошибка измерения дальности, обусловленная расхождением эталонов времени  на самолете и ИСЗ. Для снижения этой погрешности необходимо использовать высокостабильные генераторы радиосигналов. Если, например, указанная ошибка не должна превышать 3 м, то расхождение эталонов времени должно составлять величину, меньшую 0,01 мкс. Следовательно, если осуществлять синхронизацию такого эталонного генератора, то данный генератор обязан обладать стабильностью не хуже, чем 10-14. Такой, достаточно высокой, стабильностью обладают, например, цезиевый и водородный эталоны.
на самолете и ИСЗ. Для снижения этой погрешности необходимо использовать высокостабильные генераторы радиосигналов. Если, например, указанная ошибка не должна превышать 3 м, то расхождение эталонов времени должно составлять величину, меньшую 0,01 мкс. Следовательно, если осуществлять синхронизацию такого эталонного генератора, то данный генератор обязан обладать стабильностью не хуже, чем 10-14. Такой, достаточно высокой, стабильностью обладают, например, цезиевый и водородный эталоны.
Для того чтобы однозначно определить местоположение самолета дальномерным методом, спутниковая РСДН должна включать в себя не один, а по меньшей мере, три ИСЗ. На практике, однако, в целях повышения надежности местоопределения в зоне видимости располагаются не менее четырех ИСЗ.
Чтобы обеспечить указанное количество (четыре) ИСЗ для самолета, который может находиться над любой точкой земного шара, спутниковая РСДН должна обладать так называемым созвездием ИСЗ. В частности, одно из созвездий состоит из 18 ИСЗ – по 3 ИСЗ на 6 круговых орбитах, смещенных друг относительно друга на 60º по долготе. Высота орбит составляет величину порядка 20 тыс. км, 8 период обращения ИСЗ – около 12 ч.
Радиосигналы, излучаемые аппаратурой ИСЗ, имеют несущие частоты, примерно равные 1,2 и 1,6 ГГц и одинаковые для всех ИСЗ. Указанные частоты соответствуют дециметровым длинам волн и выбраны из условия наилучшего распространения электромагнитных колебаний в атмосфере.
Таким образом, ИСЗ, входящие в состав спутниковой РСДН, являются подвижными опорными станциями, координаты которых в любой момент времени известны на самолете и относительно которых бортовая аппаратура самолета выполняет расчет своего собственного местонахождения. Информация о координатах ИС3 содержится в радиосигнале, излучаемом ИСЗ.
Рассмотрим структуру радиосигнала, излучаемого ИСЗ.
Поскольку находящаяся на ИСЗ аппаратура имеет энергетические ограничения, а дальности, на которых работает спутниковая РСДН, весьма значительны, радиоизлучение с ИСЗ происходит в непрерывном режиме при небольшой (порядка сотен ватт) мощности радиопередающего устройства. При этом излучаемый радиосигнал служит для определения как дальности, так и скорости движения самолета. В любой момент времени на входе приемной антенны бортового оборудования самолета присутствует одновременно несколько радиосигналов, излучаемых различными ИСЗ на одной и той же частоте. При этом радиосигнал каждого из ИСЗ является фазо-манипулированным, причем изменение фазы от одного дискрета к другому подчиняется строго определенному для каждого из ИСЗ закону – в таком случае бортовая аппаратура самолета сможет выделить радиосигнал, принадлежащий определенному ИСЗ.
Отметим, что фазовая манипуляция несущей от дискрета к дискрету может быть различной – например, значении фаз 0º и 180º обычно используется в радиосигнале, по которому измеряется грубая дальность, а величины 90º и 270º употребляются для определения уточненной дальности. Такая традиционная для дальнометрии проблема как однозначность измерения решается путем увеличения длительности интервала  соответствующей фазовой манипуляции (например, при =5 мс величина однозначно измеряемой дальности составляет 1,5 тыс. км), а повышение точности дальнометрии осуществляется при помощи уменьшения длительности дискрета
соответствующей фазовой манипуляции (например, при =5 мс величина однозначно измеряемой дальности составляет 1,5 тыс. км), а повышение точности дальнометрии осуществляется при помощи уменьшения длительности дискрета  (а частности, при =0,5 мкс получающаяся точность измерения составит 150 м).
(а частности, при =0,5 мкс получающаяся точность измерения составит 150 м).
Перейдем к вопросу функционировании бортовой аппаратуры самолета.
Данная аппаратура выполняет целый ряд функций, основными из которых являются:
- выбор ИСЗ;
- поиск радиосигнала выбранного ИСЗ;
- измерение дальности до выбранного ИСЗ;
- измерение скорости взаимного сближения (или расхождения) самолета и выбранного ИСЗ.
Выбор того или иного ИСЗ производится на основании альманаха, хранящегося в памяти бортовой ЭЦВМ, а также данных, поступающих от других (нерадиотехнического типа) навигационных систем (например, от системы счисления пути). Данный выбор осуществляется при помощи пространственного перемещения диаграммы направленности бортовой антенны до установления радиоконтакта с выбранным ИСЗ. Отметим, что использование современных ФАР (фазированных антенных решеток) позволяет сформировать четыре (по одному на каждый ИСЗ) приемных луча одновременно.
Поиск радиосигнала, выбранного ИСЗ, происходит путем сравнения копий (вырабатываются в бортовой аппаратуре самолета по информации о кодах ИСЗ, находящейся в памяти бортовой ЭЦВМ) радиосигналов, излучаемых данным ИСЗ, с реальным принятым радиосигналом. При этом собственно поиск выполняется путем регулярного смещения во времени радиосигнала-копии относительно принятого радиосигнала до их подискретного совпадения (в этом случае выходной импульс устройства поиска будет иметь максимально возможную величину), либо до окончания заданного (90 с) времени поиска.
Измерение дальности до выбранного ИСЗ осуществляется путем определения времени запаздывания  между излученным с ИСЗ радиосигналом (таковым является участок непрерывного во времени радиоколебания длительностью , обладающий заданной фазовой структурой) и максимальным значением так называемой корреляционной функции
между излученным с ИСЗ радиосигналом (таковым является участок непрерывного во времени радиоколебания длительностью , обладающий заданной фазовой структурой) и максимальным значением так называемой корреляционной функции  , которая вырабатывается в бортовой аппаратуре самолета. При этом момент излучения фазо-манипулированного радиосигнала с ИСЗ известен на самолете (за счет синхронизации работы стабилизированных опорных генераторов на ИСЗ и самолете).
, которая вырабатывается в бортовой аппаратуре самолета. При этом момент излучения фазо-манипулированного радиосигнала с ИСЗ известен на самолете (за счет синхронизации работы стабилизированных опорных генераторов на ИСЗ и самолете).
Этот принцип измерения дальности реализуется с помощью части узлов бортовой самолетной аппаратуры (рис. 3.59), образующих канал измерения дальности.
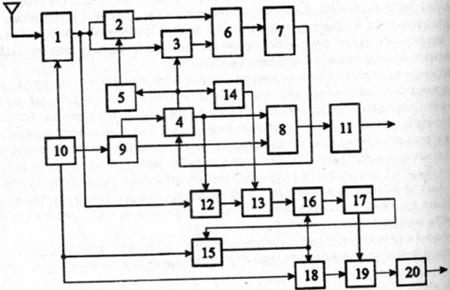 |
| Рис. 3.59. Упрощенная структурная схема каналов измерения дальности и скорости для бортовой самолетной аппаратуры спутниковой РСДН |
Здесь: 1 – радиоприемное устройство; 2 – первый коррелятор; 3 – второй коррелятор; 4 – генератор кода; 5 – элемент временной задержки на  ; 6 – блок вычитания; 7 – устройство изменения временной задержки
; 6 – блок вычитания; 7 – устройство изменения временной задержки  ; 8 – измеритель времени запаздывания
; 8 – измеритель времени запаздывания  ; 9 – синхронизатор; 10 – стабилизированный эталонный генератор; 11 – индикатор дальности; 12 – блок включения; 13 – модулятор; 14 – элемент задержки на
; 9 – синхронизатор; 10 – стабилизированный эталонный генератор; 11 – индикатор дальности; 12 – блок включения; 13 – модулятор; 14 – элемент задержки на  ; 15 – управляемый генератор; 16 – первый блок формирования разностной частоты; 17 – фильтр; 18 – второй блок формирования разностной частоты; 19 – измеритель доплеровской частоты
; 15 – управляемый генератор; 16 – первый блок формирования разностной частоты; 17 – фильтр; 18 – второй блок формирования разностной частоты; 19 – измеритель доплеровской частоты  ; 20 – индикатор скорости сближения
; 20 – индикатор скорости сближения 
Фазо-манипулированный радиосигнал от выбранного ИСЗ поступает на антенну и далее на вход радиоприемного устройства 1, после которого блоки 2 и 3 вычисляют функцию корреляции  указанного радиосигнала.
указанного радиосигнала.
Поясним процесс нахождения функции корреляции . Алгоритм ее получения в данном случае (рис. 3.4.17) описывается соотношением
 , (3.84)
, (3.84)
где  – фазо-модулированный радиосигнал на выходе радиоприемного устройства;
– фазо-модулированный радиосигнал на выходе радиоприемного устройства;  – видеонапряжение с выхода генератора кода 4, в котором сохранена структура фазо-манипулированного радиосигнала и которое смещено на величину относительно этого радиосигнала.
– видеонапряжение с выхода генератора кода 4, в котором сохранена структура фазо-манипулированного радиосигнала и которое смещено на величину относительно этого радиосигнала.
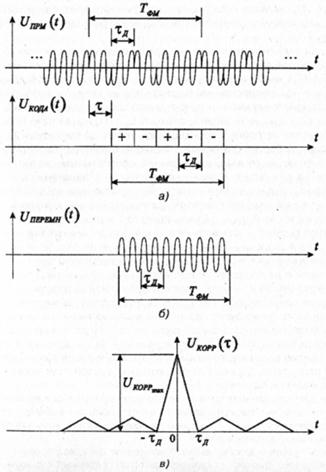 |
| Рис. 3.60. Эпюры сигналов (а, б) в разных точках схемы 3.59 и вид корреляционной функции (в) |
Поскольку закон фазовой манипуляции излученного с ИСЗ радиосигнала известен на самолете, то формула (3.84) фактически, предназначена для отыскания степени сходства сигналов  и . Очевидно, что максимальная степень сходства
и . Очевидно, что максимальная степень сходства  будет соответствовать нулевому смещению (
будет соответствовать нулевому смещению ( ) между этими сигналами, что достигается в момент времени
) между этими сигналами, что достигается в момент времени  , где
, где  .
.
С технической точки зрения операция перемножения  сводится либо к изменению фазы радионапряжения в пределах дискрета длительности на противоположную (при отрицательном дискрете
сводится либо к изменению фазы радионапряжения в пределах дискрета длительности на противоположную (при отрицательном дискрете  , совпадающем во времени с данным дискретом фазо-манипулированного радиосигнала), либо к оставлению этой фазы неизменной (при положительном дискрете ). На рис. 3.60,б представлен результат
, совпадающем во времени с данным дискретом фазо-манипулированного радиосигнала), либо к оставлению этой фазы неизменной (при положительном дискрете ). На рис. 3.60,б представлен результат  перемножения для случая, когда , т.е. произошло полное совпадение во времени фазо-манипулированного сигнала и его видеокопии.
перемножения для случая, когда , т.е. произошло полное совпадение во времени фазо-манипулированного сигнала и его видеокопии.
Следующим этапом нахождения функции корреляции  , согласно соотношению (3.84), является интегрирование (суммирование) результата перемножения за время (длительность)
, согласно соотношению (3.84), является интегрирование (суммирование) результата перемножения за время (длительность)  видеосигнала, выработанного генератором кода 4.
видеосигнала, выработанного генератором кода 4.
Наконец, последним этапом технической реализации выражения (3.4.17) становится амплитудное детектирование проинтегрированного радиосигнала.
На рис 3.60,в изображен результат амплитудного детектирования (для случая, когда фазо-манипулированный радиосигнал не является непрерывно повторяющимся радионапряжением, а представляет собой одиночный радиоимпульс длительности  ). Как легко видеть, функция имеет один большой центральный выброс (по которому и производится отсчет ) амплитуды
). Как легко видеть, функция имеет один большой центральный выброс (по которому и производится отсчет ) амплитуды  и несколько боковых выбросов значительно меньших амплитуд. Такая структура корреляционной функции (с ярко выраженным центральным пиком) характерна, строго говоря, не для любых, а лишь для достаточно ограниченного класса фазо-манипулированных радиосигналов – например, для так называемых М-последовательностей, которые получили широкое распространение в спутниковых РСДН.
и несколько боковых выбросов значительно меньших амплитуд. Такая структура корреляционной функции (с ярко выраженным центральным пиком) характерна, строго говоря, не для любых, а лишь для достаточно ограниченного класса фазо-манипулированных радиосигналов – например, для так называемых М-последовательностей, которые получили широкое распространение в спутниковых РСДН.
Так формируются выходные сигналы первого 2 и второго 3 корреляторов. Поскольку заранее дальность «самолет – выбранный ИСЗ» неизвестна, видеосигналы генератора кода должны осуществлять перемещение (поиск) по дальности – до достижения значения . Этот поиск реализуется следующим образом.
Видеосигналы кода подаются на коррелятор 3 непосредственно от генератора кода 4, а на коррелятор 2 – через элемент временной задержки на 5. Выходные напряжения корреляторов поступают на входы блока вычитания 6. Тогда выходной сигнал этого блока будет равен нулю в случае такой настройки видеосигнала кода на фазо-манипулированный радиосигнал, когда их взаимные смещения (на входах обоих корреляторов) окажутся равными  . Если же эта настройка будет иметь другую величину, то на выходе блока вычитания 6 возникнет положительное или отрицательное напряжение, которое, воздействуя через устройство измерения временной задержки 7 на генератор кода 4, заставит смещаться момент запуска данного генератора в ту или иную сторону по оси времени. При отсутствии сигнала на выходе устройства 7 генератор кода 4 вырабатывает отсчетный импульс (соответствующий времени запаздывания ), который подается на измеритель времени запаздывания 8.
. Если же эта настройка будет иметь другую величину, то на выходе блока вычитания 6 возникнет положительное или отрицательное напряжение, которое, воздействуя через устройство измерения временной задержки 7 на генератор кода 4, заставит смещаться момент запуска данного генератора в ту или иную сторону по оси времени. При отсутствии сигнала на выходе устройства 7 генератор кода 4 вырабатывает отсчетный импульс (соответствующий времени запаздывания ), который подается на измеритель времени запаздывания 8.
Измеритель времени запаздывания 8 вычисляет интервал времени между импульсом запуска (его формирует синхронизатор 9, связанный с синхронизированным эталонным генератором 10) и отсчетным импульсом (с выхода генератора кода). Далее измеренное время запаздывания преобразуется в индикаторе дальности 11 в цифровой код дальности, и этот цифровой код вводится в бортовую ЭЦВМ.
Так осуществляется работа узлов бортовой самолетной аппаратуры, образующих канал измерения дальности.
Рассмотрим работу канала измерения скорости.
Измерение скорости взаимного сближения (или расхождения) самолета  и выбранного ИСЗ осуществляется путем определения доплеровской частоты
и выбранного ИСЗ осуществляется путем определения доплеровской частоты  в бортовой аппаратуре самолета. Этот принцип измерения скорости реализуется с помощью части узлов бортовой самолетной аппаратуры (см. рис. 3.59), образующих канал измерения скорости.
в бортовой аппаратуре самолета. Этот принцип измерения скорости реализуется с помощью части узлов бортовой самолетной аппаратуры (см. рис. 3.59), образующих канал измерения скорости.
Измерение скорости происходит после измерения дальности  , т.е. отсчетный импульс с выхода генератора кода 4, помимо измерителя времени запаздывания , 8 поступает также и на блок включения 12, в результате чего радионапряжение, частота которого содержит доплеровскую составляющую , начинает подаваться на один из входов модулятора 13. На второй вход этого модулятора поступает задержанный (в элементе задержки 14) на величину
, т.е. отсчетный импульс с выхода генератора кода 4, помимо измерителя времени запаздывания , 8 поступает также и на блок включения 12, в результате чего радионапряжение, частота которого содержит доплеровскую составляющую , начинает подаваться на один из входов модулятора 13. На второй вход этого модулятора поступает задержанный (в элементе задержки 14) на величину  видеоимпульс длительности . Поэтому на выходе модулятора 13 формируется радиоимпульс, совпадающий по времени с принятым фазо-манипулированным радиосигналом.
видеоимпульс длительности . Поэтому на выходе модулятора 13 формируется радиоимпульс, совпадающий по времени с принятым фазо-манипулированным радиосигналом.
На временном интервале длительности происходит сравнение частот – фазо-манипулированного радиосигнала (содержащей ) и сформированной в бортовой аппаратуре (с помощью стабилизированного эталонного генератора 10) самолета. При этом управляемый генератор 15, способный вырабатывать радионапряжение с перестраиваемой частотой, является узлом, общим для двух каналов – канала слежения и канала индикации.
В канал слежения, помимо данного генератора, входят первый блок формирования разностной частоты 16 и фильтр 17, входное напряжение которого изменяет частоту управляемого генератора  15. Частота складывается из двух составляющих:
15. Частота складывается из двух составляющих:  – частоты стабилизированного эталонного генератора (равная, в силу периодически проводимой синхронизации, частоте заполнения фазо-модулированного радиосигнала – при отсутствии частоты ) и
– частоты стабилизированного эталонного генератора (равная, в силу периодически проводимой синхронизации, частоте заполнения фазо-модулированного радиосигнала – при отсутствии частоты ) и  – переменной частоты, т.е.
– переменной частоты, т.е. 
Случай, когда выходное напряжение фильтра 17 окажется равным нулю, означает, что  . В этот момент фильтр 17 вырабатывает отсчетный импульс, поступающий на измеритель доплеровской частоты 19.
. В этот момент фильтр 17 вырабатывает отсчетный импульс, поступающий на измеритель доплеровской частоты 19.
В канал индикации входят второй блок формирования разностной (между и частотой заполнения фазо-манипулированного радиосигнала, содержащей ) частоты 18, измеритель доплеровской частоты 19 и индикатор скорости сближения  20.
20.
По отсчетному импульсу с выхода фильтра 17 происходит определение величины в измерителе 19 и, после пересчета индикатором 20 в скорость сближения , величина этой скорости в виде цифрового кода передается в бортовую ЭЦВМ.
Так происходит работа узлов бортовой аппаратуры самолета, образующих канал измерения скорости сближения (или расхождения).
Аналогичная обработка фазо-манипулированных радиосигналов, поступивших от другого ИСЗ, выполняется в других сходных по построению узлах бортовой аппаратуры того же самолета – с последующей передачей цифровых кодов дальности (до другого ИСЗ) и скорости сближения (с другим ИСЗ) в единую бортовую ЭЦВМ, которая и выполняет окончательное вычисление местоположения самолета.
Приведем основные тактико-технологические характеристики спутниковой РСДН:
- частотные диапазоны, МГц 960…1215 и 1535…1660
- дальность действия глобальная РСДН
Погрешности определения:
- дальности, м 5,6…30
- скорости, м/с 0,2
- времени, нс 48
- местоположения, м 17,8…100
- полное время передачи альманаха,с 750
- максимальное время поиска кода, с 90
Некоторые составляющие дальномерной погрешности, м:
- прогноз эфемерид 3,5
- эталон времени ИСЗ 1,7
- ионосферная рефракция 0,5
Некоторые данные бортового оборудования самолета:
- потребляемая мощность от сети 27 В постоянного тока, В 50…100
- масса комплекта (без кабелей), кг 10…20
- объем комплекта, дм3 15…25
- средняя наработка до отказа, тыс.ч 5

