 2015-04-17
2015-04-17 1915
1915Профильным (рис. 3.62) называется такой полет летательного аппарата (самолета или вертолета), когда траектория движения этого летательного аппарата повторяет профиль местности, расположенной под летательным аппаратом (ЛА).
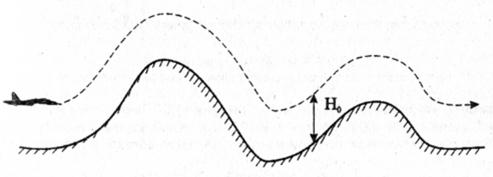 |
| Рис 3.62. Профильный полет ЛА |
Необходимость осуществления профильного полета диктуется (в основном, для военной авиации) требованием преодолеть систему противовоздушной обороны (ПВО) противника и скрытно выйти в район заданного объекта. Данное требование может быть выполнено с максимальной эффективностью лишь при полете ЛА на малых высотах, поскольку:
– измерение расстояния до низколетящего ЛА радиосистемами ПВО противника возможно лишь в условиях прямой видимости;
– радиосигналы, отраженные от низколетящих ЛА, в значительной степени маскируются другими отраженными (от земной поверхности, от местных объектов) радиосигналами;
– низколетящий ЛА может обладать повышенными скоростью (за счет использования складок земной поверхности или выступающих местных объектов) и внезапностью появления, оставляя средствам ПВО противника малое время на отражение атаки.
Однако режим маловысотного полета ЛА связан с усложнением самолетовождения в условиях близости к земной поверхности или местным объектам. Данное усложнение связано, в первую очередь, с резко ограниченным временным ресурсом (возникающим как из-за малых дальностей, так и высоких скоростей полета ЛА). Психологические нагрузки на летчика (экипаж) при пилотировании ЛА на малых высотах оказываются достаточно значительными, и потому целый ряд функций, связанных с маневрированием ЛА, в настоящее время выполняются автоматическими устройствами. В число этих автоматических устройств входит радиолокационная система профильного полета (РСПП).
Задача РСПП состоит в выработке управляющих сигналов для обеспечения маловысотного профильного полета ЛА, на борту которого располагается данная РСПП. Иными словами, управляющие сигналы РСПП должны в каждый момент реализовывать сохранение уравнения профильного полета
 , (3.94)
, (3.94)
где  – высота полета ЛА.
– высота полета ЛА.
Рассмотрим геометрическую картину формирования уравнения (3.63).
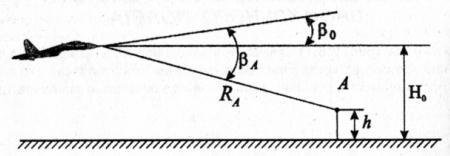 |
| Рис. 3.63. Геометрическая картина, поясняющая принцип получения уравнения профильного полета |
Очевидно, что движение ЛА диктует обращение РСПП не к точке, находящейся в данный момент непосредственно под ЛА, а к некой упрежденной точке ( на рис 3.6.2), расположенной впереди по курсу ЛА. Тогда составим уравнение
на рис 3.6.2), расположенной впереди по курсу ЛА. Тогда составим уравнение
 (3.95)
(3.95)
где  – высота точки над земной поверхностью;
– высота точки над земной поверхностью;  – расстояние от ЛА до точки ;
– расстояние от ЛА до точки ;  – угол места (относительно оптической оси антенны) точки ;
– угол места (относительно оптической оси антенны) точки ;  – угол атаки ЛА, из которого получим:
– угол атаки ЛА, из которого получим:

или полагая углы и малыми
 (3.96)
(3.96)
Соотношение (3.6.3) справедливо для некоторого момента времени  , когда высота полета ЛА равна величине . Для момента времени
, когда высота полета ЛА равна величине . Для момента времени  , когда ЛА окажется непосредственно над точкой , уравнение (3.94) профильного полета примет вид:
, когда ЛА окажется непосредственно над точкой , уравнение (3.94) профильного полета примет вид:
 (3.97)
(3.97)
Следовательно, бортовая РСПП, измерив расстояние  в момент времени , должна (при фиксированных
в момент времени , должна (при фиксированных  ,
,  и ) выработать сигнал, который через интервал времени
и ) выработать сигнал, который через интервал времени  приведет ЛА к расположению на высоте над точкой . Поскольку высота полета, согласно уравнению (3.6.4), определяется (при неподвижном луче) лишь дальностью до упрежденной точки , рассматриваемые РСПП относятся к радиосистемам дальномерного типа. Что касается конкретных значений величины , то они зависят от скорости движения ЛА, его маневренных способностей и рельефа местности. В частности, для современных самолетов при
приведет ЛА к расположению на высоте над точкой . Поскольку высота полета, согласно уравнению (3.6.4), определяется (при неподвижном луче) лишь дальностью до упрежденной точки , рассматриваемые РСПП относятся к радиосистемам дальномерного типа. Что касается конкретных значений величины , то они зависят от скорости движения ЛА, его маневренных способностей и рельефа местности. В частности, для современных самолетов при  км/ч значения должны быть меньше 5…20 км, а для вертолетов 0,5…5 км.
км/ч значения должны быть меньше 5…20 км, а для вертолетов 0,5…5 км.
Эти значения обуславливают, в свою очередь, при маловысотном ( – несколько десятков метров) полете небольшие (порядка единиц градусов) величины угла  , что влечет за собой требование достаточной (порядка сотых долей градуса) узости диаграммы направленности антенны РСПП и неизбежное увеличение (в сантиметровом диапазоне – до 5…6 м) линейных размеров этой антенны. Поскольку в носовой части фюзеляжа ЛА возможна установка антенн лишь со сравнительно небольшими (40…60 см) линейными размерами, является более целесообразным, чтобы антенна РСПП формировала не один, а два луча. Тогда отсчет углового положения точки
, что влечет за собой требование достаточной (порядка сотых долей градуса) узости диаграммы направленности антенны РСПП и неизбежное увеличение (в сантиметровом диапазоне – до 5…6 м) линейных размеров этой антенны. Поскольку в носовой части фюзеляжа ЛА возможна установка антенн лишь со сравнительно небольшими (40…60 см) линейными размерами, является более целесообразным, чтобы антенна РСПП формировала не один, а два луча. Тогда отсчет углового положения точки  может быть осуществлен методом сравнения (равносигнальным), при котором требуемая точность измерения (доли угловых минут) достигается при реально-обеспечиваемой (порядка 1…3º) ширине луча. Используемая на практике в РСПП моноимпульсная система измерения угла в вертикальной плоскости позволяет, одновременно с измерением указанного угла определить и высоту (на участке
может быть осуществлен методом сравнения (равносигнальным), при котором требуемая точность измерения (доли угловых минут) достигается при реально-обеспечиваемой (порядка 1…3º) ширине луча. Используемая на практике в РСПП моноимпульсная система измерения угла в вертикальной плоскости позволяет, одновременно с измерением указанного угла определить и высоту (на участке  – рис 3.6.3,а) полета ЛА без качания (сканирования) диаграммы направленности.
– рис 3.6.3,а) полета ЛА без качания (сканирования) диаграммы направленности.
Структурная схема РСПП и эпюры напряжений в различных точках РСП приведены на рис. 3.64.
Работа РСПП осуществляется следующим образом.
Под воздействием импульсного запуска, поступившего от синхронизатора 1, радиопередающее устройство 2 вырабатывает высокочастотный радиоимпульс малой (для необходимой точности измерения дальности) длительности, который через антенный блок 3 и систему из двух антенн, формирующих двухлучевую (в вертикальной плоскости) диаграмму направленности, излучается в пространство.
Отраженный от земной поверхности радиоимпульс принимается двумя антеннами и, пройдя через антенный блок, подается на входы радиоприемных устройств суммарного 4 и разностного 5 сигналов.
Поскольку в данной РСПП реализуется метод сравнения (равносигнальный), то измерение дальности будет осуществлено от ЛА до точки на земной поверхности – именно эта точка соответствует пересечению радиосигнального направления (РСН) с земной поверхностью, и временная задержка  отраженного от данной точки радиосигнала (относительно момента излучения) будет измеряться по моменту нулевого напряжения (рис 3.64,б) на выходе радиоприемного устройства разностного сигнала и следующего за ним фазового детектора 6.
отраженного от данной точки радиосигнала (относительно момента излучения) будет измеряться по моменту нулевого напряжения (рис 3.64,б) на выходе радиоприемного устройства разностного сигнала и следующего за ним фазового детектора 6.
На рис. 3.64,б сплошной линией показан вид напряжения на выходе фазового детектора без учета мешающих флуктуаций отдельных отражающих точек земной поверхности, а пунктирной линией – возможные искажения указанного напряжения, возникающее при наличии флуктуаций. В частности, одним из эффектов, сопровождающих действие этих флуктуаций, являются хаотические спады выходного напряжения до нуля и, соответственно, появление ложных отсчетных импульсов (вырабатываемых формирователем 7) – 3.64,в.
Для устранения ошибочных измерений дальности по ложным отсчетным импульсам используется детектор 8, находящийся на выходе радиоприемного устройства суммарного сигнала, и селектор 9. Видеонапряжение (огибающая) суммарного сигнала с выхода детектора (рис. 3.64,г) подается на один вход селектора, а последовательность отсчетных импульсов – на второй. В итоге, на выходе селектора вырабатывается отсчетный импульс (рис. 3.64,д), соответствующий точке .
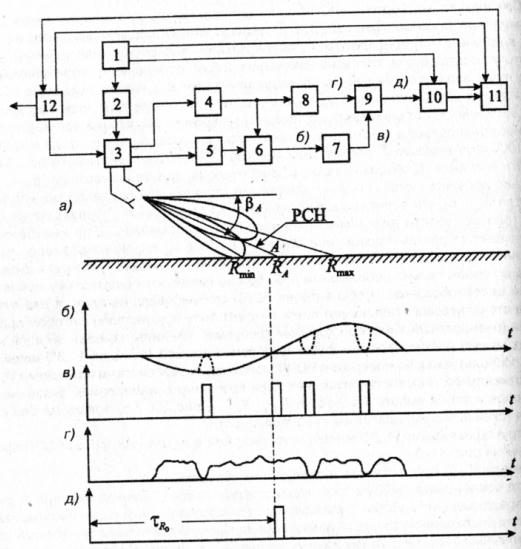 |
| Рис. 3.64. Структурная схема (а) РСПП и эпюры (б, в, г, д) напряжений: 1 – синхронизатор; 2 – радиопередающее устройство; 3 – антенный блок; 4 – радиоприемное устройство суммарного сигнала; 5 – радиоприемное устройство разностного сигнала; 6 – фазовый детектор; 7 – формирователь отсчетных импульсов; 8 – детектор; 9 – селектор; 10 – измеритель дальности ; 11 – вычислительное устройство; 12 – управляющее устройство |
Данный отсчетный импульс поступает далее на измеритель дальности  10, а сформированный код дальности – из измерителя в вычислительное устройство 11, которое запоминает полученный код дальности и, с учетом информации, поступающей от управляющего устройства 12, рассчитывает упрежденную высоту полета ЛА над точкой . Затем результаты расчета пересылаются в управляющее устройство, которое в свою очередь регулирует (при необходимости) положение антенной системы и направляет расчетные данные в систему автоматического управления полетом ЛА согласно профилю земной поверхности (на рис. 3.64 не показана)
10, а сформированный код дальности – из измерителя в вычислительное устройство 11, которое запоминает полученный код дальности и, с учетом информации, поступающей от управляющего устройства 12, рассчитывает упрежденную высоту полета ЛА над точкой . Затем результаты расчета пересылаются в управляющее устройство, которое в свою очередь регулирует (при необходимости) положение антенной системы и направляет расчетные данные в систему автоматического управления полетом ЛА согласно профилю земной поверхности (на рис. 3.64 не показана)
Отметим, что рассмотренная моноимпульсная РСПП обеспечивает повышенную точность измерения высоты неровностей земной поверхности и местных объектов, поскольку положение нулевой точки весьма стабильно и не зависит от параметров схем и возможных рассогласований в каналах РСПП.








