 2015-04-17
2015-04-17 978
978Одной из особенностей, присущих современной авиационной ситуации, является достаточно высокая плотность воздушного движения, особенно в районах крупных аэропортов. Эта особенность, относящаяся как к военной, так и к гражданской авиации, приводит нередко к возникновению конфликтной обстановки, которая чаще всего характеризуется возможным пересечением самолетных траекторий. При этом, если указанное пересечение прогнозируется на различных и далеко относящихся друг от друга по величине высотах полета, то уровень конфликтности имеет здесь весьма малую величину, и необходимость в принятии каких-либо предупредительных мер практически исчезает. Иное дело, если пересечение маршрутов будет, по предположению, происходить при малой разнице высот или в одной плоскости (наихудший случай) – такое возможное событие приобретает высокий уровень конфликтности, поскольку чревато столкновением самолетов, и расценивается как чрезвычайное происшествие, которого необходимо избегать всеми возможными средствами.
Радиосистемы предупреждения столкновений являются одними из основных средств предотвращения гибельного развития конфликта, поскольку позволяют заранее прояснить сложившуюся воздушную ситуацию и выработать сигнал аварийного предупреждения. Разумеется, бортовые радиосистемы предупреждения столкновений (РСПС) нередко работают в радиоконтакте с наземными службами (контрольными пунктами, навигационными радиомаяками и т.д.), однако, поскольку контролируемое на земном шаре воздушное пространство составляет величину порядка 25%, далее рассматриваются только бортовые РСПС.
Концепция функционирования РСПС в наиболее общем виде состоит в реализации так называемого « -критерия», заключающегося в вычислении (и индикации) текущего значения интервала времени и сравнении его с заранее определенными пороговыми величинами
-критерия», заключающегося в вычислении (и индикации) текущего значения интервала времени и сравнении его с заранее определенными пороговыми величинами  и
и  .
.
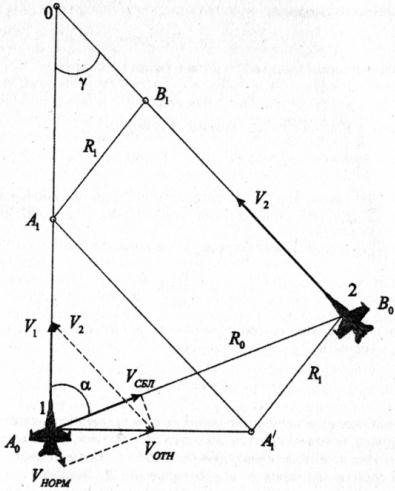
Рассмотрим процесс нахождения более подробно. Для этого воспользуемся геометрической картиной, изображенной на рис. 3.61.
|
| Рис. 3.61. Геометрические величины, характеризующие сближение самолетов |
Пусть траектории двух самолетов, движущихся в одной плоскости прямолинейно и с постоянными скоростями, пересекаются в точке О под углом  . При этом в начальный момент времени
. При этом в начальный момент времени  самолет 1 находится в точке
самолет 1 находится в точке  , а самолет 2 – в точке
, а самолет 2 – в точке  . Расстояние между этими точками обозначим
. Расстояние между этими точками обозначим  , а угол, под которым самолет 2 наблюдается из самолета – как
, а угол, под которым самолет 2 наблюдается из самолета – как  . Тогда в некий следующий момент времени
. Тогда в некий следующий момент времени  самолет 1, летящий со скоростью
самолет 1, летящий со скоростью  , окажется в точке
, окажется в точке  , а самолет 2, перемещающийся со скоростью
, а самолет 2, перемещающийся со скоростью  , – в точке
, – в точке  . В общем случае из-за различных скоростей отрезок
. В общем случае из-за различных скоростей отрезок  (расстояние между точками и ) не будет параллелен отрезку . Такова исходная геометрическая ситуация.
(расстояние между точками и ) не будет параллелен отрезку . Такова исходная геометрическая ситуация.
Выполним дополнительные построения.
Переместим отрезок параллельно самому себе так, чтобы точка совместилась с точкой – тогда новым положением точки окажется точка  . Соединим точки и .
. Соединим точки и .
Перенесем вектор к вектору ; тогда разностью этих векторов окажется вектор относительной скорости  , ориентированный вдоль отрезка
, ориентированный вдоль отрезка  . Разложим вектор на две ортогональные составляющие – скорость сближения
. Разложим вектор на две ортогональные составляющие – скорость сближения  (вдоль отрезка
(вдоль отрезка  ) и скорость
) и скорость  .
.
Также можно записать следующие тригонометрические соотношения:
для скорости сближения
 (3.85)
(3.85)
для относительной скорости
 (3.86)
(3.86)
для нормальной (ортогональной) составляющей скорости
 (3.87)
(3.87)
для расстояния  в произвольный момент времени
в произвольный момент времени 
 (3.88)
(3.88)
где  .
.
Время  , отсчитываемое от момента времени
, отсчитываемое от момента времени  до минимального (в пределах треугольника
до минимального (в пределах треугольника  ) расстояния между самолетами 1 и 2, будет определяться из уравнения
) расстояния между самолетами 1 и 2, будет определяться из уравнения  и запишется в окончательном виде как
и запишется в окончательном виде как
 (3.89)
(3.89)
Если изначально вычисляемую величину рассматривать как минимально время  , то полагая
, то полагая  , получим:
, получим:
 (3.90)
(3.90)
Формальный анализ этого соотношения говорит о равноправности влияния  и
и  на ; однако, исходя из результатов летней практики, можно сделать вывод, что основным компонентом, влияющим на выбор , как интервала времени до наибольшего сближения, является все же величина . Выражение (3.90) можно трактовать и иначе – наиболее опасной является ситуация, когда
на ; однако, исходя из результатов летней практики, можно сделать вывод, что основным компонентом, влияющим на выбор , как интервала времени до наибольшего сближения, является все же величина . Выражение (3.90) можно трактовать и иначе – наиболее опасной является ситуация, когда  и, следовательно,
и, следовательно,  . Правда, при малых значениях алгоритм (3.90) обладает весьма небольшой эффективностью, ибо движение самолетов 1 и 2 по почти параллельным траекториям. Тем не менее, величина является основной при формировании -критерия.
. Правда, при малых значениях алгоритм (3.90) обладает весьма небольшой эффективностью, ибо движение самолетов 1 и 2 по почти параллельным траекториям. Тем не менее, величина является основной при формировании -критерия.
Для получения конкретных значений и (пороговых величин  ) воспользуемся выражениями для вычисления длительности маневра
) воспользуемся выражениями для вычисления длительности маневра  и
и  в вертикальной и горизонтальной плоскостях:
в вертикальной и горизонтальной плоскостях:
 (3.91)
(3.91)
и
 (3.92)
(3.92)
где  – безопасная разность высот самолетов 1 и 2;
– безопасная разность высот самолетов 1 и 2;  – скорость самолета, выполняющего маневр;
– скорость самолета, выполняющего маневр;  – нормальное ускорение в вертикальной плоскости;
– нормальное ускорение в вертикальной плоскости;  – безопасное расстояние в горизонтальной плоскости;
– безопасное расстояние в горизонтальной плоскости;  – радиус разворота в горизонтальной плоскости.
– радиус разворота в горизонтальной плоскости.
При этом величина рассчитывается как
 (3.93)
(3.93)
где  – угол крена;
– угол крена;  – нормальное ускорение в горизонтальной плоскости.
– нормальное ускорение в горизонтальной плоскости.
Если в соотношения (3.91) – (3.93) подставить конкретные величины, взятые из традиционной летней практики, то можно найти соответствующие значения для и . В частности, для гражданской авиации ( м;
м;  м;
м;  ;
;  ) минимальная длительность маневра
) минимальная длительность маневра  составляет 20 с, а с учетом реакции пилота и так называемого интервала запаса оно принимается равным 30 с. Поэтому алгоритм работы РСПС согласно -критерию формулируется следующим образом: если в процессе измерения величина окажется равной значению
составляет 20 с, а с учетом реакции пилота и так называемого интервала запаса оно принимается равным 30 с. Поэтому алгоритм работы РСПС согласно -критерию формулируется следующим образом: если в процессе измерения величина окажется равной значению  с, самолетами 1 и 2 должно быть начато формирование взаимно-координированных маневров по уклонению от столкновения, а если – равной
с, самолетами 1 и 2 должно быть начато формирование взаимно-координированных маневров по уклонению от столкновения, а если – равной  с, то маневр должен начать выполняться.
с, то маневр должен начать выполняться.
При этом, когда текущее значение меньше, чем , на индикаторном табло пилота должен загореться сигнал, запрещающий горизонтальные маневры, а в запросный (излучаемый) радиосигнал включается информация о степенях свободы защищаемого (от столкновения) самолета: вверх – свободна верхняя зона пространства, вверх-вниз – свободны обе области, прямо 0 обе зоны предупреждения заняты. На указанный запрос сближающийся самолет отвечает радиосигналом, в состав которого включается (соответствующим кодом) рекомендация защищаемому самолету выполнить один из трех маневров – вверх, вниз, прямо. Полученная рекомендация отображается на индикаторе пилота. При  на индикатор пилота выдается команда на выполнение маневра. В случае, когда сближающиеся самолеты достигают высоты безопасного расхождения, указанные команды не передаются, а в запросных радиосигналах защищаемого самолета перестают передаваться данные о его степенях свободы.
на индикатор пилота выдается команда на выполнение маневра. В случае, когда сближающиеся самолеты достигают высоты безопасного расхождения, указанные команды не передаются, а в запросных радиосигналах защищаемого самолета перестают передаваться данные о его степенях свободы.








