2015-04-17
2015-04-17 2063
2063Традиционным (и наиболее часто применяемым в практике авиационных радиосистем) способом измерения путевой скорости летательного аппарата является использование доплеровской частоты  . Вместе с тем, существует еще один радиотехнический метод определения путевой скорости (и угла сноса) – корреляционный. Его суть сводится к следующему.
. Вместе с тем, существует еще один радиотехнический метод определения путевой скорости (и угла сноса) – корреляционный. Его суть сводится к следующему.
Зависимость высот  различных точек земной поверхности в функции от текущего горизонтального расстояния
различных точек земной поверхности в функции от текущего горизонтального расстояния  во вдольполетном направлении является в принципе, случайной функцией – одна из ее возможных реализаций изображена на рис. 3.84,а.
во вдольполетном направлении является в принципе, случайной функцией – одна из ее возможных реализаций изображена на рис. 3.84,а.
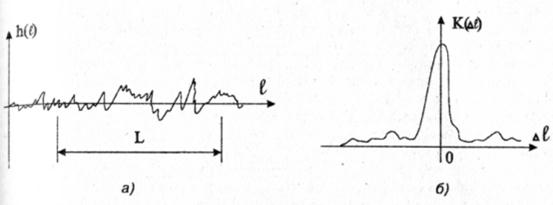 |
| Рис. 3.84. Профиль участка земной поверхности (а) и соответствующая корреляционная функция (б) |
Корреляционной функцией  данной реализации
данной реализации  называется соотношение следующего вида:
называется соотношение следующего вида:
 , (3.108)
, (3.108)
где  – длина вдольполетного участка земной поверхности, на котором вычисляется данная корреляционная функция, а
– длина вдольполетного участка земной поверхности, на котором вычисляется данная корреляционная функция, а  – величина смещения реализации относительно самой себя.
– величина смещения реализации относительно самой себя.
Поскольку зависимость имеет, как правило, узкий пик при  и не обладает значительными боковыми выбросами (рис. 3.84,б), эти обстоятельства обуславливают использование алгоритма (3.108) в задаче нахождения путевой скорости самолета.
и не обладает значительными боковыми выбросами (рис. 3.84,б), эти обстоятельства обуславливают использование алгоритма (3.108) в задаче нахождения путевой скорости самолета.
Предположим, что самолет, на котором установлены одна излучающая 1 и две приемных 2 и 3 антенны (рис. 3.85), летит горизонтально с постоянной скоростью  . Радиосигнал, излучаемый вертикально вниз, принимается двумя (также ориентированными вертикально в сторону земной поверхности) приемными антеннами, которые разнесены на одинаковые расстояния
. Радиосигнал, излучаемый вертикально вниз, принимается двумя (также ориентированными вертикально в сторону земной поверхности) приемными антеннами, которые разнесены на одинаковые расстояния  относительно излучающей антенны.
относительно излучающей антенны.
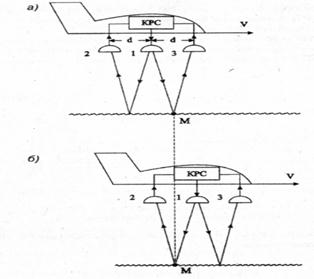 |
Рис 3.85. Геометрическое соотношение для корреляционной радиостанции (КРС) в начальный (а) и конечный (б) моменты интервала длительности  : 1 – излучающая антенна; 2 – антенна первого приемного канала; 3 – антенна второго приемного канала. : 1 – излучающая антенна; 2 – антенна первого приемного канала; 3 – антенна второго приемного канала. |
При этом наиболее благоприятный режим измерения путевой скорости самолета корреляционным методом обеспечивается, когда радиосигнал, отраженный от точки  земной поверхности, сначала поступает на антенну второго приемного канала 3, а спустя интервал времени – на антенну первого приемного канала 2. Это условие означает, что напряжение
земной поверхности, сначала поступает на антенну второго приемного канала 3, а спустя интервал времени – на антенну первого приемного канала 2. Это условие означает, что напряжение  и
и  на выходах первого и второго приемных каналов будут (в силу отражения от одной и той же точки) иметь практически одинаковую структуру:
на выходах первого и второго приемных каналов будут (в силу отражения от одной и той же точки) иметь практически одинаковую структуру:
 . (3.109)
. (3.109)
Поскольку между смещением по земной поверхности во вдоль полетном направлении и смещением  во времени существует линейная зависимость
во времени существует линейная зависимость  , то максимуму корреляционной функции будет соответствовать максимум корреляционной функции
, то максимуму корреляционной функции будет соответствовать максимум корреляционной функции  , которая, с учетом (3.109), может быть записана в виде
, которая, с учетом (3.109), может быть записана в виде
 , (3.110)
, (3.110)
где  . Очевидно, что максимум функции
. Очевидно, что максимум функции  будет достигаться, когда
будет достигаться, когда  или, что то же,
или, что то же,  . Последнее равенство указывает на операцию, которую надо произвести над
. Последнее равенство указывает на операцию, которую надо произвести над  , чтобы обеспечить достижение функцией ее максимального значения, а именно – осуществить временную задержку на величину
, чтобы обеспечить достижение функцией ее максимального значения, а именно – осуществить временную задержку на величину  .
.
Структурная схема корреляционной радиосистемы измерения путевой скорости  самолета представлена на рис. 3.86 (номера 1, 2, 3 бортовых антенн соответствуют обозначениям рис. 3.85).
самолета представлена на рис. 3.86 (номера 1, 2, 3 бортовых антенн соответствуют обозначениям рис. 3.85).
Излучаемый радиосигнал формируется радиопередающим устройством 4 и через антенну 1 направляется к земной поверхности. Отраженные от земной поверхности радиосигналы принимаются антеннами 2 и 3 и через первое 5 и второе 6 радиоприемные устройства подаются на совокупность узлов, вычисляющих корреляционные функции  и
и  :
:
 ;
;
 ,
,
где  и
и  – времена задержки в первой 7 и во второй 8 перестраиваемых линиях задержки. Эти длительности почти одинаковы, т.е.
– времена задержки в первой 7 и во второй 8 перестраиваемых линиях задержки. Эти длительности почти одинаковы, т.е.  . Узлы 9 и 10 выполняют функции перемножения, а блоки 11 и 12 осуществляют интегрирование результатов перемножения – иными словами, совокупность узлов 7, 9 и 11 формирует значение корреляционной функции , а последовательность узлов 8, 10 и 12 – корреляционной функции . В блоке 13 происходит вычисление разности корреляционных функций и , а результат вычитания подается на устройство регулирования задержек.
. Узлы 9 и 10 выполняют функции перемножения, а блоки 11 и 12 осуществляют интегрирование результатов перемножения – иными словами, совокупность узлов 7, 9 и 11 формирует значение корреляционной функции , а последовательность узлов 8, 10 и 12 – корреляционной функции . В блоке 13 происходит вычисление разности корреляционных функций и , а результат вычитания подается на устройство регулирования задержек.
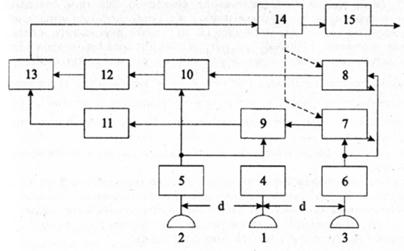 |
Рис. 3.86. Структурная схема корреляционной радиосистемы измерения путевой скорости: 1 –излучающая антенна; 2 – антенна первого приемного канала; 3 – антенна второго приемного канала; 4 – радиопередающее устройство; 5 – радиоприемное устройство первого канала; 6 – радиоприемное устройство второго канала; 7 – первая перестраиваемая линия задержки (на интервал ); 8 – вторая перестраиваемая линия задержки (на интервал  )ервая перестраиваемая линия задержки (на интервал; 9 – первый перемножитель; 10 – второй перемножитель; 11 – первый интегратор; 12 – второй интегратор; 13 – блок вычитания; 14 – устройство регулирования задержек; 15 – индикатор путевой скорости. )ервая перестраиваемая линия задержки (на интервал; 9 – первый перемножитель; 10 – второй перемножитель; 11 – первый интегратор; 12 – второй интегратор; 13 – блок вычитания; 14 – устройство регулирования задержек; 15 – индикатор путевой скорости. |
Обе линии задержки перестраиваются синхронно. При этом, поскольку заранее не известно, нужно ли увеличивать и (чтобы добиться максимума корреляционной функции) или уменьшать их, то наличие двух каналов и блока вычитания позволяет сформировать сигнал рассогласования, воздействующий (посредством устройства регулирования) на и в ту или другую сторону. Регулирование прекращается, когда  , т.е. значения и расположены симметрично относительно
, т.е. значения и расположены симметрично относительно  . В этот момент индикатор 15 путевой скорости самолета вырабатывает, используя соотношение
. В этот момент индикатор 15 путевой скорости самолета вырабатывает, используя соотношение  , значение указанной скорости.
, значение указанной скорости.
Рассмотрим принцип измерения угла сноса  в данной корреляционной радиосистеме.
в данной корреляционной радиосистеме.
Для решения этой задачи антенна второго приемного сигнала 3 «расщепляется» на две ( ,
,  – см. рис. 3.87), смещенные в обе стороны по отношению к оси антенной системы на одинаковые расстояния, и изложенные выше (корреляционным) способом вычисляются соответствующие
– см. рис. 3.87), смещенные в обе стороны по отношению к оси антенной системы на одинаковые расстояния, и изложенные выше (корреляционным) способом вычисляются соответствующие  (проекция на линию 2- ) и
(проекция на линию 2- ) и  (проекция на линию 2- ) путевой скорости ; здесь:
(проекция на линию 2- ) путевой скорости ; здесь:
 (3.111)
(3.111)
 .
.
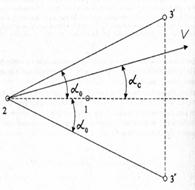 |
| Рис. 3.87. Конфигурация антенной системы корреляционной радиосистемы в режиме измерения угла сноса : 1 – точка расположения излучающей антенны; 2, , – точки расположения приемных антенн. |
После вычисления указанных составляющих антенная система разворачивается до достижения равенства  (в этом случае угол сноса будет равным 0). Данный угол разворота оси антенной системы относительно продольной оси самолета будет углом сноса , а величина определится из соотношения
(в этом случае угол сноса будет равным 0). Данный угол разворота оси антенной системы относительно продольной оси самолета будет углом сноса , а величина определится из соотношения
 . (3.112)
. (3.112)
Если на самолете имеется бортовой вычислитель, то механический поворот антенной системы может быть заменен алгоритмическим расчетом значений и .
Следует отметить, что техническая реализация корреляционных радиосистем достаточно сложна. Кроме того, при использовании этих радиосистем возникает дополнительная проблема компенсации влияния кренов самолета на точность измерений. Поэтому корреляционные радиосистемы применяются сравнительно редко и лишь в ограниченном числе случаев – например, когда измерение путевой скорости доплеровским методом затруднено (полет, скажем, выполняется с вертикально-ориентированной диаграммой направленности; в такой ситуации доплеровская частота либо близка к нулю, либо, что значительно чаще, вовсе отсутствует).