 2015-04-17
2015-04-17 1631
1631Радиосистема навигации по картам местности (РНКМ) относится к числу наиболее современных навигационных радиосистем, входящих в состав навигационно-пилотажного комплекса. Полномасштабное (на всем этапе активного полета) использование РНКМ обусловлено мощным развитием как электронно-вычислительной техники, способной ориентировать с гигантскими объемами цифровых данных, так и микроэлектронных технологий, обеспечивающих малые массо-габаритные показатели различных узлов бортовой аппаратуры.
Принцип навигации по картам местности известен практически со времен зарождения авиации. Экипаж, отправляющийся в полет, брал с собой географическую карту тех районов местности, над которыми предстояло лететь; во время полета экипаж наблюдал расположение наземных ориентиров (излучин рек, лесных построек, особенностей дорог и т.п.) и сравнивал их с указанными позициями на карте и, таким образом выяснял местонахождение самолета. Та же процедура определения местоположения самолета лежит в основе функционирования РНКМ: предполетная закладка в память бортовой ЭЦВМ эталонной карты местности (над которой самолету предстоит совершать полет); формирование (с помощью радиосредств) во время полета текущей карты местности; автоматическое (в бортовой ЭЦВМ) сравнение эталонной и текущей карт местности с последующей выдачей результатов сравнения для вычисления местонахождения самолета.
Рассмотрим некоторые узловые моменты, относящиеся к функционированию РНКМ.
Формирование карты местности в электронном (цифровом) виде означает следующее. Каждому элементарному участку площади местности  ставится в соответствие (как показано на рис. 3.88) двоичное число
ставится в соответствие (как показано на рис. 3.88) двоичное число  , отражающее высоту объекта
, отражающее высоту объекта  , расположенного на элементарном участке
, расположенного на элементарном участке  . Например, если
. Например, если  (двоичное число «101» равняется десятичному числу «5»), это означает, что на данном участке находится объект, высота которого равна 5 условным единицам (скажем, 5 м). Тогда совокупность
(двоичное число «101» равняется десятичному числу «5»), это означает, что на данном участке находится объект, высота которого равна 5 условным единицам (скажем, 5 м). Тогда совокупность  значений (здесь:
значений (здесь:  ;
;  ), занесенных в соответствующем порядке в матрицу памяти бортовой ЭЦВМ, будет называть цифровой картой местности. Если речь идет об эталонной карте местности, то совокупность вводится в матрицу памяти до полета; если же имеется в виду текущая карта местности, то совокупность формируется по отраженным от земной поверхности радиосигналам в процессе полета самолета с последующей рассылкой двоичных чисел в соответствующие (
), занесенных в соответствующем порядке в матрицу памяти бортовой ЭЦВМ, будет называть цифровой картой местности. Если речь идет об эталонной карте местности, то совокупность вводится в матрицу памяти до полета; если же имеется в виду текущая карта местности, то совокупность формируется по отраженным от земной поверхности радиосигналам в процессе полета самолета с последующей рассылкой двоичных чисел в соответствующие ( ) ячейки матрицы памяти бортовой ЭЦВМ.
) ячейки матрицы памяти бортовой ЭЦВМ.
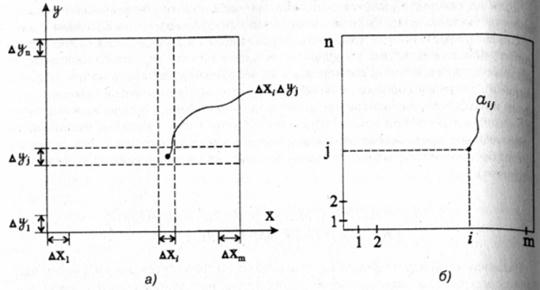 |
| Рис. 3.88. Площадь участка местности (а) и матрица памяти бортовой ЭЦВМ (б) |
Процесс получения значений требует выполнения так называемой операции квантования (разбиения на определенное количество уровней) величины  . Так, в частности, на рис. 3.89 приведена развертка (вдоль оси Х) профиля местности, принадлежащему полосе
. Так, в частности, на рис. 3.89 приведена развертка (вдоль оси Х) профиля местности, принадлежащему полосе  .
.
При этом осуществляется разбиение (квантование) зависимости  уровнями квантования, интервал между любыми двумя соседними из которых равен величине
уровнями квантования, интервал между любыми двумя соседними из которых равен величине  (за нулевой обычно принимается уровень мирового океана). Из рисунка видно, что значения зависимости , принадлежащие элементу
(за нулевой обычно принимается уровень мирового океана). Из рисунка видно, что значения зависимости , принадлежащие элементу  , располагаются в пределах 5 …6 . Поэтому значению на интервале присваивается величина , равная 101.
, располагаются в пределах 5 …6 . Поэтому значению на интервале присваивается величина , равная 101.
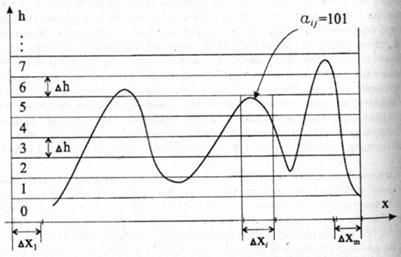 |
| Рис. 3.89. К пояснению принципа квантования высоты |
Следует отметить особенность составления карты местности – она строится в системе координат XY (т.е. в плоскости земли), в то время как бортовые радиосистемы измеряют дальность до какого-то объекта на земной поверхности в местной сферической системе координат. Поэтому, чтобы согласовать указанные координатные системы, РНКМ должна еще дополнительно определять высоту  полета.
полета.
Одним из способов нахождения полета является использование на борту барометрического высотомера; однако при полете над равнинной местностью в условиях турбулентности или на больших высотах в РНКМ применяются радиовысотомеры больших высот, работающие в импульсном режиме.
Расположение диаграмм направленности антенной системы показано на рис. 3.90.
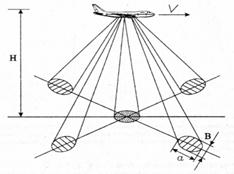 |
| Рис. 3.90. Расположение диаграмм направленности антенной системы РНКМ |
Центральный луч, направленный вертикально вниз, необходим для измерения высоты полета; остальные четыре луча предназначены для получения карты местности. При этом ширина  наземного отражающего участка выбирается с учетом возможного максимального поперечного смещения
наземного отражающего участка выбирается с учетом возможного максимального поперечного смещения  самолета относительно линии полета, происходящего из-за погрешности системы счисления пути, в именно:
самолета относительно линии полета, происходящего из-за погрешности системы счисления пути, в именно:  . В свою очередь, величина определяет ширину
. В свою очередь, величина определяет ширину  диаграммы направленности в азимутальной плоскости; обычно
диаграммы направленности в азимутальной плоскости; обычно  º. Продольный размер
º. Продольный размер  отражающего участка земной поверхности обусловлен требуемой детальностью изображения карты местности. Из рассмотрения рис 3.11.4 можно видеть, что указанная детальность определяется количеством
отражающего участка земной поверхности обусловлен требуемой детальностью изображения карты местности. Из рассмотрения рис 3.11.4 можно видеть, что указанная детальность определяется количеством  ячеек в
ячеек в  -й строке матрицы памяти бортовой ЭЦВМ и величиной расстояния
-й строке матрицы памяти бортовой ЭЦВМ и величиной расстояния  , соответствующего интервалу между соседними ячейками, т.е. в итоге можно записать
, соответствующего интервалу между соседними ячейками, т.е. в итоге можно записать
 ,
,
где  – длительность излученного радиоимпульса.
– длительность излученного радиоимпульса.
Тогда при  мкс и
мкс и  получим
получим  км.
км.
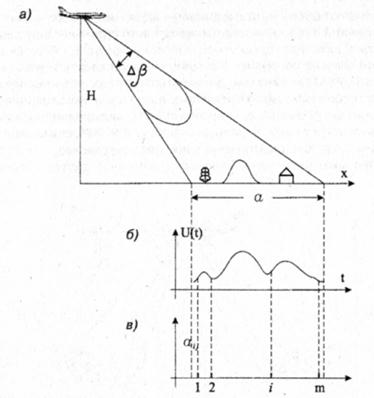 |
| Рис. 3.91. Принцип формирования текущей карты местности в РНКМ: а – сечение диаграммы направленности угломестной плоскостью и объекты на облучаемом участке земной поверхности; б – видеонапряжение на выходе бортового радиоприемного устройства, соответствующее указанным объектам; в – набор двоичных чисел , помещаемых в -ю строку матрицы памяти бортовой ЭЦВМ. |
Структурная схема РНКМ изображена на рис. 3.92.
Устройство управления и синхронизации 1 запускает радиопередающее устройство 2, которое формирует радиоимпульс короткой длительности, излучаемый далее антенной системой 3 в сторону земной поверхности.
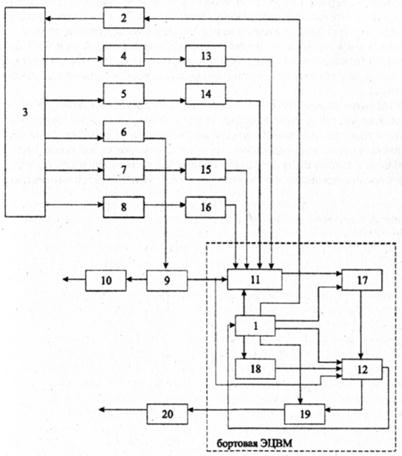 |
| Рис. 3.92. Структурная схема РНКМ: 1 – устройство управления и синхронизации; 2 – радиопередающее устройство; 3 – антенная система; 4 – первое радиоприемное устройство; 5 – второе радиоприемное устройство; 6 – третье радиоприемное устройство; 7 – четвертое радиоприемное устройство; 8 – пятое радиоприемное устройство; 9 – измеритель высоты полета; 10 – индикатор высоты полета; 11 – преобразователь-распределитель; 12 – устройство сравнения; 13 – первый квантователь; 14 – второй квантователь; 15 – третий квантователь; 16 – четвертый квантователь; 17 – устройство обработки; 18 – блок памяти; 19 – устройство определения местоположения самолета; 20 – индикатор местонахождения самолета. |
Отраженные от земной поверхности радиоимпульсы, пройдя через антенную систему 3, поступаю на входы первого 4, второго 5, третьего 6, четвертого 7 и пятого 8 радиоприемных устройств. При этом третье радиоприемное устройство 6 соединено с выходом антенного устройства, формирующего вертикальный (по отношению к земной поверхности) луч. Видеоимпульс с выхода третьего радиоприемного устройства подается на измеритель 9 высоты , показания которого далее высвечиваются на индикаторе высоты 10. Одновременно значение высоты полета вводится в преобразователь-распределитель 11 и в устройство сравнения 12.
Что касается выходов оставшихся четырех радиоприемных устройств, то каждый из этих выходов соединен с соответствующим (первым 13, вторым 14, третьим 15 и четвертым 16) квантователем, в результате чего отраженные от земной поверхности и принятые по наклонным лучам сигналы преобразуются в цифровую форму – совокупность двоичных чисел  . Все эти числа вводятся в преобразователь-распределитель 11. Задачами преобразователя-распределителя являются как пересчет дальности
. Все эти числа вводятся в преобразователь-распределитель 11. Задачами преобразователя-распределителя являются как пересчет дальности  от самолета до наземного объекта во вдоль полетное расстояние
от самолета до наземного объекта во вдоль полетное расстояние  этого объекта по земной поверхности, так и рассортировка чисел по соответствующим ячейкам местной (локальной) памяти. Фактически преобразователь-распределитель 11 выполняет формирование первичной текущей карты местности.
этого объекта по земной поверхности, так и рассортировка чисел по соответствующим ячейкам местной (локальной) памяти. Фактически преобразователь-распределитель 11 выполняет формирование первичной текущей карты местности.
Первичная текущая карта местности отличается от окончательной текущей карты местности большей «засоренностью» случайными, хаотически возникающими выбросами. Формирование окончательной текущей карты местности на основе ряда операций (фильтрация, сравнение и т.д.), выполняемых над набором первичных текущих карт местности, осуществляет устройство обработки 17. Текущая карта местности в ее окончательном виде подается на один из входов устройства сравнения 12.
На другой вход устройства сравнения 12 поступает эталонная карта местности, ранее находившаяся в блоке памяти 18. Устройство сравнения сопоставляет между собой указанные карты местности при помощи корреляционного алгоритма, выявляя степень их сходства. Если степень (значение функции корреляции) сходства окажется ниже наперед заданного значения, устройство сравнения посылает в устройство управления и синхронизации соответствующий импульс. Если же заданная величина степени сходства достигнута (или превзойдена), устройство сравнения оповещает об этом устройство определения местоположения самолета 19, и его пространственные координаты высвечиваются на индикаторе местонахождения самолета 20.
Так осуществляется навигация самолета с помощью РНКМ.
Следует отметить, что корреляционный алгоритм сравнения текущей и эталонной карт местности достаточно чувствителен как к геометрическим (появление дополнительных наземных объектов, изменения ракурса антенны и т.д.), так и к амплитудным (наличие снежного покрова, весенние паводки и т.п.) искажениям текущей (относительно эталонной) карты местности. Поэтому в целях обеспечения большей достоверности процедуры сравнения используются усложненные алгоритмы.
Что касается самой РНКМ, то ее основным недостатком является плохое картографирование (получение текущей карты местности) при маловысотном полете. Дело в том, что отдельные складки местности могут создавать в таком случае достаточно протяженные радиотени, которые маскируют собой более мелкие детали рельефа. Поэтому в случае полета на небольших высотах в качестве основного поставщика информации о земной поверхности используется вертикальный луч.








