 2015-04-17
2015-04-17 3323
3323Определение направления (текущих угловых величин) полета является весьма важной задачей самолетовождения, которая решается с помощью радиосистем навигационно-пилотажного комплекса. Одно из наиболее часто используемых для определения углового направления полета радиосистем является автоматический радиокомпас.
Необходимость установки на борту данной радиосистемы связана с тем, что приборы, ориентирующиеся по силовым линиям постоянного магнитного поля Земли, имеют значительный погрешности. Угловые ошибки таких приборов особенно возрастают, когда полет происходит над районами залежей железных руд или местами магнитных аномалий. Использование же радиосистем позволяет измерить угловые координаты с высокой точностью.
Автоматический радиокомпас предназначен для определения углового положения  радиомаяка (географическое местоположение которого известно экипажу) относительно продольной оси летательного аппарата (самолета, вертолета) – рис. 3.79. Курсовой угол индицируется на приборах в кабине экипажа. В качестве радиомаяка могут использоваться не только специализированные наземные излучатели, но и большой класс других наземных излучающих пунктов – например, широковещательные радиостанции.
радиомаяка (географическое местоположение которого известно экипажу) относительно продольной оси летательного аппарата (самолета, вертолета) – рис. 3.79. Курсовой угол индицируется на приборах в кабине экипажа. В качестве радиомаяка могут использоваться не только специализированные наземные излучатели, но и большой класс других наземных излучающих пунктов – например, широковещательные радиостанции.
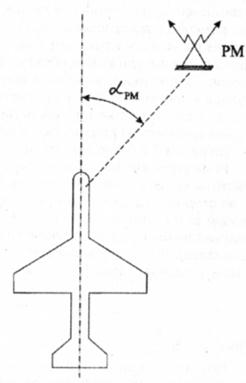 |
| Рис. 3.79. Курсовой угол () радиомаяка (РМ), определяемый самолетным автоматическим радиокомпасом |
 |
| Рис. 3.80. Рамка, используемая в автоматическом радиокомпасе: а – ее вид; б – диаграмма направленности; в – векторная диаграмма напряжений. |
Специфическим элементом автоматического радиокомпаса является антенный блок, состоящий из рамочной антенны (вместе с гониометром) и ненаправленной антенны. Рассмотрим подробнее работу этого блока.
Начнем с отдельной рамки. Ее внешний вид представлен на рис. 3.80,а.
Излученное радиомаяком электромагнитное поле пронизывает плоскость рамки, и в ее боковых сторонах возникают напряжения  и
и  . Поскольку антенна радиомаяка обычно (для обеспечения круговой в горизонтальной плоскости диаграммы направленности) выполняется в виде вертикального штыря, то рамка, соответственно, рассчитана на прием только вертикальной составляющей поля; прием рамкой горизонтальных составляющих, обусловленных, чаще всего, отражениями радиоволн от ионосферы, рассматривается как мешающий, помеховый фактор. На выходе рамки образуется (снимаемое индуктивным образом) напряжение
. Поскольку антенна радиомаяка обычно (для обеспечения круговой в горизонтальной плоскости диаграммы направленности) выполняется в виде вертикального штыря, то рамка, соответственно, рассчитана на прием только вертикальной составляющей поля; прием рамкой горизонтальных составляющих, обусловленных, чаще всего, отражениями радиоволн от ионосферы, рассматривается как мешающий, помеховый фактор. На выходе рамки образуется (снимаемое индуктивным образом) напряжение  , в котором заключена информация о стороне (относительно перпендикуляра к плоскости рамки) местоположения радиомаяка и о величине отклонения (относительно того же перпендикуляра к плоскости рамки) этого радиомаяка. Поясним физическую сторону формирования данной информации.
, в котором заключена информация о стороне (относительно перпендикуляра к плоскости рамки) местоположения радиомаяка и о величине отклонения (относительно того же перпендикуляра к плоскости рамки) этого радиомаяка. Поясним физическую сторону формирования данной информации.
На рис 3.80,б показан вид на рамку сверху и расположение радиомаяка.
Радиомаяк излучает в пространство непрерывный гармонический радиосигнал частоты  . Электромагнитное поле той же частоты достигает рамки и наводит в ее сторонах напряжения и той же частоты . При этом амплитуды напряжений и оказываются практически одинаковыми (поскольку размер
. Электромагнитное поле той же частоты достигает рамки и наводит в ее сторонах напряжения и той же частоты . При этом амплитуды напряжений и оказываются практически одинаковыми (поскольку размер  между вертикальными сторонами рамки много меньше, чем расстояние от рамки до радиомаяка). Что же касается фаз напряжения и , то они оказываются различными, и разность этих фаз
между вертикальными сторонами рамки много меньше, чем расстояние от рамки до радиомаяка). Что же касается фаз напряжения и , то они оказываются различными, и разность этих фаз  может быть вычислена как
может быть вычислена как
 , (3.106)
, (3.106)
где  .
.
Оба эти напряжения являются компонентами, формирующими (рис. 3.80,в) выходное напряжение данной рамки, которое может быть записано в виде
 , (3.107)
, (3.107)
где  .
.
Иными словами, амплитуда  высокочастотного напряжения зависит от величины курсового угла
высокочастотного напряжения зависит от величины курсового угла  , и поэтому можно сказать, что диаграмма направленности рамки
, и поэтому можно сказать, что диаграмма направленности рамки  , описываемая соотношением
, описываемая соотношением  , имеет двухлепестковый (в форме «восьмерки») вид. При этом фаза (0º или 180º) каждого лепестка определяется фазой (0º или 180º) выходного напряжения рамки . Таким образом, величина отклонения радиомаяка от перпендикуляра к плоскости рамки пропорциональна амплитуде
, имеет двухлепестковый (в форме «восьмерки») вид. При этом фаза (0º или 180º) каждого лепестка определяется фазой (0º или 180º) выходного напряжения рамки . Таким образом, величина отклонения радиомаяка от перпендикуляра к плоскости рамки пропорциональна амплитуде  напряжения . В частности, если радиомаяк, расположенный на рис. 3.80,б справа от перпендикуляра к плоскости рамки, окажется слева от этого перпендикуляра, то напряжения и на рис 3.80,в поменяются местами, а вектор изменит свое направление на противоположное.
напряжения . В частности, если радиомаяк, расположенный на рис. 3.80,б справа от перпендикуляра к плоскости рамки, окажется слева от этого перпендикуляра, то напряжения и на рис 3.80,в поменяются местами, а вектор изменит свое направление на противоположное.
Перейдем к рассмотрению принципа работы рамочной антенны (вместе с гониометром), устанавливаемой на средних и тяжелых самолетах гражданской авиации.
Данная рамочная антенна состоит из двух взаимно перпендикулярных неподвижных рамок ( и
и  ), в плоскости одной () из которых находится продольная ось самолета, и гониометра, состоящего из двух взаимно перпендикулярных неподвижных статорных обмоток (
), в плоскости одной () из которых находится продольная ось самолета, и гониометра, состоящего из двух взаимно перпендикулярных неподвижных статорных обмоток ( и
и  ), в поле которых располагается подвижный ротор (катушка), соединенный с электродвигателем (рис. 3.81). При этом рамки и имеют, соответственно, диаграммы направленности
), в поле которых располагается подвижный ротор (катушка), соединенный с электродвигателем (рис. 3.81). При этом рамки и имеют, соответственно, диаграммы направленности  и
и  , описываемые выражениями:
, описываемые выражениями:  и
и  .
.
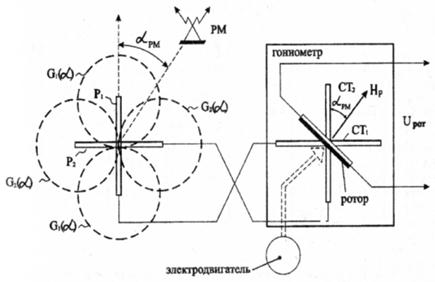 |
| Рис 3.81. Структура рамочной антенны (вместе с гониометром) для автоматического радиокомпаса |
Электромагнитное излучение радиомаяка РМ, достигая рамочной антенны, наводит в рамках и выходные напряжения:
 ;
;
 ,
,
с одинаковыми (по причине симметрии рамок) значениями . Далее эти напряжения подаются на статорные (неподвижные) обмотки ( и ) гониометра.
В результате магнитные поля, создаваемые обмотками и внутри гониометра, полностью воспроизводят структуру электромагнитного поля, существующую в точке местонахождения рамок и , так как амплитуды напряженностей магнитных полей, формируемых обмотками и , будут равны:
 ;
;
Это означает, что вектор результирующего магнитного поля  располагается по отношению к плоскости статора под углом
располагается по отношению к плоскости статора под углом  .
.
В поле статоров располагается подвижный ротор (катушка) выходное напряжение  которого принимает нулевое значение, когда угол поворота ротора (относительно плоскости статорной обмотки ) оказывается равным . Отметим, что напряжения и (рис. 3.80,в) идентичны.
которого принимает нулевое значение, когда угол поворота ротора (относительно плоскости статорной обмотки ) оказывается равным . Отметим, что напряжения и (рис. 3.80,в) идентичны.
Аппаратура автоматического радиокомпаса строится таким образом, чтобы во время полета угол поворота ротора поддерживался равным – эта операция осуществляется при помощи воздействия на электродвигатель, который осуществляет поворот ротора на нужный угол. Однако, антенный блок автоматического радиокомпаса состоит не только из рамочной антенны (вместе с гониометром). Он еще включает в себя ненаправленную антенну (НА), принимающую от радиомаяка колебания частоты  (рис. 3.82,а):
(рис. 3.82,а):
 .
.
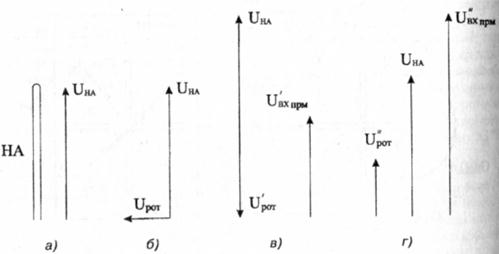 |
| Рис. 3.82. Ненаправленная антенна (НА) и векторные диаграммы напряжений |
Указанное напряжение является, фактически, базовым, поскольку обеспечивает формирование амплитудно-модулированного колебания  на входе радиоприемного устройства. Дело в том, что электродвигатель, разворачивающий ротор, слабо реагирует на изменение фазы (0º или 180º), зато уверенно воспринимает амплитудную модуляцию.
на входе радиоприемного устройства. Дело в том, что электродвигатель, разворачивающий ротор, слабо реагирует на изменение фазы (0º или 180º), зато уверенно воспринимает амплитудную модуляцию.
Принцип формирования амплитудной модуляции состоит в суммировании напряжений  и . Однако непосредственное суммирование не принесет желаемого эффекта, поскольку напряжение на выходе ротора и напряжение ненаправленной антенны всегда сдвинуты на 90º по фазе (один из вариантов изображен на рис. 3.82,б). Поэтому на выходе ротора устанавливается фазовращатель, изменяющий фазу напряжения на 90º. На рис. 3.82,в и г приведены два случая – когда напряжения
и . Однако непосредственное суммирование не принесет желаемого эффекта, поскольку напряжение на выходе ротора и напряжение ненаправленной антенны всегда сдвинуты на 90º по фазе (один из вариантов изображен на рис. 3.82,б). Поэтому на выходе ротора устанавливается фазовращатель, изменяющий фазу напряжения на 90º. На рис. 3.82,в и г приведены два случая – когда напряжения  и
и  на выходе фазовращателей оказываются либо противофазными (рис 3.82,в), либо синфазными (рис 3.82,г) напряжению . Соответственно, итоги их суммирования обозначены как
на выходе фазовращателей оказываются либо противофазными (рис 3.82,в), либо синфазными (рис 3.82,г) напряжению . Соответственно, итоги их суммирования обозначены как  и
и  . Как видим, в зависимости от стороны расположения радиомаяка относительно продольной оси самолета входное напряжение радиоприемного устройства оказывается либо меньшей, либо большей амплитуды. Так возникает амплитудная модуляция, необходимая для управления электродвигателем.
. Как видим, в зависимости от стороны расположения радиомаяка относительно продольной оси самолета входное напряжение радиоприемного устройства оказывается либо меньшей, либо большей амплитуды. Так возникает амплитудная модуляция, необходимая для управления электродвигателем.
Структурная схема автоматического радиокомпаса показана на рис. 3.83.
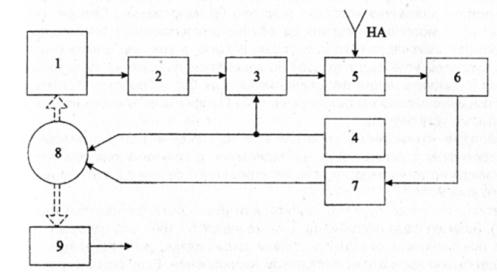 |
| Рис. 3.83. Структурная схема автоматического радиокомпаса: 1 – рамочная антенна (вместе с гониометром); 2 – первое фазосдвигающее на 90º устройство; 3 – балансный модулятор; 4 – генератор низкочастотного колебания; 5 – блок суммирования; 6 – радиоприемное устройство; 7 – второе фазосдвигающее на 90º устройство; 8 – электродвигатель; 9 – индикатор курсового угла. |
Электромагнитное колебание частоты принимается рамочной антенной 1 (вместе с гониометром), и выработанное этим узлом напряжение поступает на первое фазосдвигающее на 90º устройство 2. После смещения по фазе напряжение  (или ) частоты подается на балансный модулятор 3, на второй вход которого вводится низкочастотное (20…80 Гц) колебание частоты
(или ) частоты подается на балансный модулятор 3, на второй вход которого вводится низкочастотное (20…80 Гц) колебание частоты  , формируемое генератором низкочастотного колебания 4. необходимость постановки балансного модулятора объясняется требованием создать переключение фаз (на 0º или 180º) в напряжении частоты .
, формируемое генератором низкочастотного колебания 4. необходимость постановки балансного модулятора объясняется требованием создать переключение фаз (на 0º или 180º) в напряжении частоты .
Дело в том, что поворот ротора является (по сравнению с напряжением частоты ) достаточно инерционным процессом, а судя по векторной диаграмме рис 3.9.4,б, смена фаз напряжения на противоположную произойдет лишь при переходе радиомаяка на другую сторону относительно продольной оси самолета. Поэтому переключение фаз напряжения (для создания дальнейшей амплитудной модуляции) осуществляется искусственным путем – подачей переключающего колебания частоты на балансный модулятор. Прием с использованием балансного модулятора эквивалентен прямому переключению выхода ротора, но выполняется технически проще.
С выхода балансного модулятора напряжение (или ) частоты вводится на один на один из входов блока суммирования 5. На другой вход этого блока поступает напряжение частоты , подаваемое с выхода направленной антенны.
После сложения этих напряжений результирующее колебание ( или – см. векторные диаграммы рис. 3.9.4,в,г) частоты оказывается амплитудно-модулированным, причем частота модуляции равна величине . Данное амплитудно-модулированное колебание поступает далее на вход радиоприемного устройства 6, на выходе которого вырабатывается огибающая этого колебания, т.е. напряжение частоты . Отметим, что в случае точной настройки на радиомаяк (курсовой угол  ) амплитудная модуляция входного напряжения радиоприемного устройства отсутствует, и выходное напряжение радиоприемного устройства равно 0.
) амплитудная модуляция входного напряжения радиоприемного устройства отсутствует, и выходное напряжение радиоприемного устройства равно 0.
Для дальнейшего управления (поворота) ротором на электродвигатель 8 необходимо подать два низкочастотных (частоты ) напряжения. Первое, опорное, поступает на обмотку возбуждения двухфазного асинхронного электродвигателя от генератора низкочастотного колебания. Второе, в котором заключена информация о курсовом угле  , подается на управляющую обмотку того же электродвигателя с выхода второго фазосдвигающего на 90º устройства 7 (которое выполняет смещение фазы напряжения частоты , сформированного на выходе радиоприемного устройства).
, подается на управляющую обмотку того же электродвигателя с выхода второго фазосдвигающего на 90º устройства 7 (которое выполняет смещение фазы напряжения частоты , сформированного на выходе радиоприемного устройства).
В результате совместного действия этих напряжений ротор разворачивается своей плоскостью в направлении на радиомаяк, а величина курсового угла , определяемая по углу поворота вала электродвигателя, передается на индикатор курсового угла 9.
Отметим, что когда  , электродвигатель останавливается (поскольку º). Если же фаза напряжения меняется на 180º, это означает, что продольная ось самолета оказалась правее радиомаяка, и тогда вращение вала электродвигателя происходит в обратном направлении. Если ротор окажется развернутым не на радиомаяк ( º), а от радиомаяка (
, электродвигатель останавливается (поскольку º). Если же фаза напряжения меняется на 180º, это означает, что продольная ось самолета оказалась правее радиомаяка, и тогда вращение вала электродвигателя происходит в обратном направлении. Если ротор окажется развернутым не на радиомаяк ( º), а от радиомаяка ( º), то такое положение ротора будет неустойчивым, а именно – при небольшом изменении (например, вследствие рыскания самолета) или из-за наличия помехового напряжения, электродвигатель начнет отрабатывать это рассогласование, уменьшая его, и стрелка индикатора курсового угла установится на истинное значение
º), то такое положение ротора будет неустойчивым, а именно – при небольшом изменении (например, вследствие рыскания самолета) или из-за наличия помехового напряжения, электродвигатель начнет отрабатывать это рассогласование, уменьшая его, и стрелка индикатора курсового угла установится на истинное значение
Приведем некоторые технические характеристики автоматического радиокомпаса.
- дальность действия, км 2000…400
- диапазон рабочих частот, кГц 200…1750
- максимальная погрешность измерения курсового угла (), º  3
3
- амплитуда колебаний стрелки индикатора курсового угла, º 2
- средняя скорость отработки курсового угла, град/с 30
- чувствительность приемника, мкВ 50
- масса комплекта (без кабелей), кг 15
- объем блока приемника вместе с амортизационной рамой, дм3 15,2
- потребляемая мощность от сети:36 В, 400 Гц,  36
36
- 27 В постоянного тока, Вт 54
- время непрерывной работы, ч 24
- средняя наработка на отказ,ч 1000








