 2015-04-17
2015-04-17 6544
6544Радиосистема посадки (РСП) – это радиосистема посадки совокупность наземных и бортовых радиоустройств, предназначенных для определения местоположения летательного аппарата (ЛА) относительно взлетно-посадочной полосы ВПП на этапах снижения и посадки. При этом информация об указанном местоположении ЛА формируется на борту данного ЛА.
Ранее на рис. 3.1 была приведена типовая структура полетной траектории самолета, причем этап посадки был представлен в достаточно общем виде. Если же рассмотреть этап посадки более детально, то следует воспользоваться рис. 4.16,а, на котором приведен профиль траектории самолета в вертикальной плоскости на заключительных этапах полета.
На этом рисунке показаны:
1 – полет без снижения, в течение которого самолет обычно выполняет развороты согласно требуемым курсовым (в горизонтальной плоскости) углам, чтобы реализовывать полет максимально приближенный к заданной линии курса и в итоге, выйти на глиссаду (на заранее определенную линию снижения);
2 – снижение самолета, происходящее по заданной траектории (глиссаде);
3 – выравнивание; при этом самолет продолжает снижение, однако под меньшим углом к земной поверхности;
4 – коррекция полета относительно оси ВПП (например, для устранения сноса, обуславливаемого боковым ветром);
5 – заключительный этап (от момента касания ВПП до окончания пробега самолета по ВПП).
 |
| Рис. 4.16. Профиль траекторий снижения и посадки самолета в вертикальной плоскости (а) и расположение основных радиомаяков РСП относительно взлетно-посадочной полосы (ВПП) в горизонтальной плоскости (б) |
Здесь: 1 – этап полета без снижения; 2 – этап снижения самолета по заданной (опорной) траектории; 3 – этап выравнивания перед посадкой; 4 – этап коррекции перед посадкой; 5 – заключительный этап посадки самолета.
При этом автоматическое управление (в том числе, и с помощью РСП) посадкой должно обеспечивать отклонение самолета не больше, чем:
а) в горизонтальной плоскости (относительно оси ВПП):
- ±9,1 м (на высоте 30 м);
- ±4,6 м (на высоте 15 м);
- ±4,1 м (на высоте 2,4 м);
б) в вертикальной плоскости (относительно глиссады):
- ±3,0 м (на высоте 30 м);
- ±1,4 м (на высоте 15 м);
- ±0,4 м (на высоте 2,4 м).
Границы зоны допустимых отклонений в горизонтальной плоскости отмечены пунктиром на рис. 4.16,б. Указанные значения заданы ICAO (International Civil Aviation Organization) из соображений обеспечения безопасности посадки самолета. При этом этапы 3 (частично), 4 (полностью) и 5 (полностью) реализуются с помощью ручного управления.
Рассмотрим функционирование используемых в настоящее время радиосистем посадки РСП, работающих в сантиметровом диапазоне радиоволн.
Основным наземным оборудованием этих РСП являются три радиомаяка — дальномерный, азимутальный и угломестный (расположение их изображено на рис. 4.16,б). Что касается бортового оборудования РСП, то оно состоит из независимых друг от друга дальномерной (определяющей расстояние между самолетом и центральной точкой ВПП) и угломерной (измеряющей попеременно во времени угол места и азимут самолета) подсистем. Данный радиомаяк и соответствующая подсистема образуют тот или иной канал РСП.
Дальномерный канал РСП
Дальномерный канал РСП предназначен для измерения расстояния  между находящимся в воздухе летательным аппаратом (самолетом или вертолетом) и центральной точкой ЦТ взлетно-посадочной полосы ВПП.
между находящимся в воздухе летательным аппаратом (самолетом или вертолетом) и центральной точкой ЦТ взлетно-посадочной полосы ВПП.
В рассматриваемом канале используется временной (импульсный) метод измерения дальности, причем принцип действия канала основан на методе «запрос-ответ». Иными словами, запросный радиосигнал формируется бортовой радиоаппаратурой подлетающего самолета, а ответный радиосигнал создается в радиоаппаратуре наземного дальномерного радиомаяка. Собственно измерение дальности происходит в бортовой аппаратуре самолета.
Поскольку принцип функционирования дальномерного канала РСП сходен с принципом действия дальномерного какала РСБН, то аналитическими соотношениями для вычисления дальности с помощью дальномерного канала РСП могут служить выражения (4.1) и (4.2).
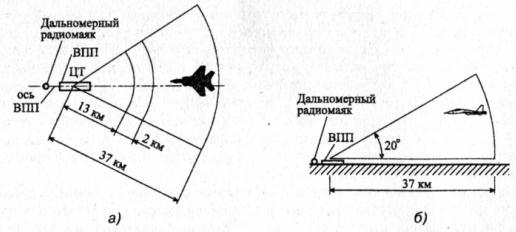 |
| Рис. 4.17. Зона действия дальномерного радиомаяка РСП в горизонтальной (а) и вертикальной (б) плоскостях: ВПП – взлетно-посадочная полоса; ЦТ – центральная точка ВПП. |
Зона действия дальномерного канала РСП изображена на рис. 4.17. Внутри нее выделены три области:
1) 0... 13 км – область дальнометрии повышенной точности;
2) 13...15 км – переходная область (обычно переключение на область повышенной точности происходит в бортовой аппаратуре на дальности 14,5 км);
3) 15...37 км – область дальнометрии обычной точности.
Функционирование дальномерного канала РСП происходит в диапазоне частот от 960 МГц до 1215 МГц.
Структурная схема дальномерного канала РСП представлена на рис. 4.18.
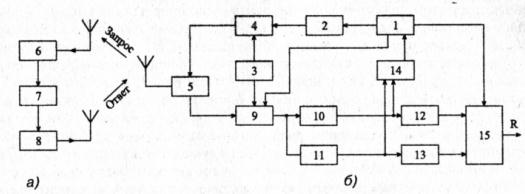 |
| Рис. 4.18. Структурные схемы наземного (а) и бортового (б) радиооборудования дальномерного канала РСН: 1 – видеопроцессор; 2 – модулятор; 3 – синтезатор частоты; 4 – бортовое радиопередающее устройство; 5 – антенный переключатель; 6 – радиоприемное устройство дальномерного радиомаяка; 7 – формирователь ответного сигнала; 8 – радиопередающее устройство дальномерного радиомаяка; 9 – бортовое радиоприемное устройство; 10 – устройство узкополосной фильтрации; 11 – устройство широкополосной фильтрации; 12 – грубая пороговая схема; 13 – точная пороговая схема; 14 – дискриминатор Ферриса; 15 – вычислитель. |
Рассмотрим принцип ее работы.
Видеопроцессор 1, входящий в состав бортового оборудования, вырабатывает два кодовых импульса, которые далее будут излучены в качестве запросного сигнала. При этом интервалы между этими импульсами могут быть различными (в зависимости от выбора того или иного частотного канала для излучения из диапазона 1041...1150 МГц) и составлять величины от 12...18 мкс до 36...42 мкс, а длительность одного импульса располагается в пределах 3...4 мкс. При этом количество запросных кодовых пар импульсов, излучаемых за одну секунду, зависит от области (рис. 4.17 а), в которой находится самолет – для области дальнометрии повышенной точности оно составляет 40, а для области дальнометрии обычной точности это количество равняется 16. В итоге, данные кодовые импульсы сначала поступают на модулятор 2, а затем, будучи заполнены высокочастотным колебанием с синтезатора частот 3 в бортовом радиопередающем устройстве 4, подаются (импульсная мощность составляет 120 Вт) на антенный переключатель 5, с выхода которого через антенную систему излучаются в пространство в качестве запросного радиосигнала.
Запросный радиосигнал поступает на приемную антенну наземного дально- мерного радиомаяка, после чего с выхода радиоприемного устройства 6 подается на формирователь ответного сигнала 7. В этом формирователе запросный сигнал декодируется, а далее вырабатывается ответный сигнал (который так же, как и запросный, состоит из двух импульсов, причем интервал между ними является кодовым и составляет, в зависимости от выбранного частотного канала, величину от 12 до 30 мкс). Данная пара кодированных импульсов вводится в радиопередающее устройство, после чего через передающую антенну излучается в пространство в качестве ответного радиосигнала, обладающего иной частотой заполнения, чем у запросного радиосигнала.
Ответный радиосигнал поступает на антенную систему, находящуюся на борту самолета, а далее, через антенный переключатель 5 вводится в бортовое радиоприемное устройство 9, частотный диапазон которого составляет 978...1213 МГц. На другие входы данного радиоприемного устройства подаются еще радиоколебание от синтезатора 3 (на смеситель для обеспечения формирования промежуточной частоты) и напряжение от видеопроцессора 1 (с целью защиты каскадов от перегрузки путем снижения коэффициентов усиления этих каскадов). Далее выходное напряжение радиоприемного устройства 9 разветвляется на входы двух устройств – узкополосной фильтрации 10 (полоса 0,35 МГц), применяемого при полете самолета в области дальнометрии обычной точности, и широкополосной фильтрации 11 (полоса 3,5 МГц), используемого при полете самолета в области дальнометрии повышенной точности, ибо расширение полосы фильтрации позволяет работать с импульсами, которые обладают более крутыми фронтами, что ведет к повышению точности дальнометрии. Каждое из указанных устройств фильтрации имеет на выходе соответствующую пороговую схему, которая вырабатывает тот или иной отсчетный импульс дальности – грубая пороговая схема 12 установлена после устройства узкополосной фильтрации, а точная пороговая схема 13 (ее структура приведена на рис. 4.19) находится на выходе устройства широкополосной фильтрации. Кроме того, выходы обоих устройств фильтрации подключены к входам так называемого дискриминатора Ферриса 14 (этот дискриминатор является, по своему построению, коммутатором), который предназначен для переключения режимов видеопроцессора 1 в зависимости от того, какая (обычной или повышенной точности) область дальнометрии соответствует полету самолета в данный момент времени. Наконец, выходы грубой и точной пороговых схем соединены со входами вычислителя15, работа которого синхронизируется от видеопроцессора 1. Вычислитель 15 функционирует в соответствии с алгоритмами (4.1) и (4.2), рассчитывая дальность.
Рассмотрим в заключение структуру и работу точной пороговой схемы (рис. 4.19). Поскольку рис. 4.19 раскрывает построение и функционирование одного из узлов, приведенных на рис. 4.18, то нумерация блоков рис. 4.19 продолжает нумерацию блоков рис. 4.18.
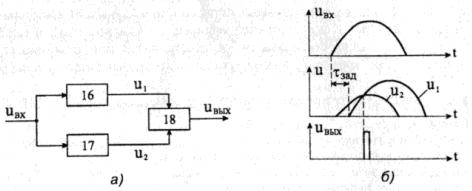 |
Рис. 4.19. Структурная схема точной пороговой схемы (а) и временные диаграммы напряжений (б) 16 – линия задержки (на  ); 17 – аттенюатор; 18 – компаратор. ); 17 – аттенюатор; 18 – компаратор. |
Входной импульс  , передний фронт которого описывается функцией
, передний фронт которого описывается функцией  , а задний – функцией
, а задний – функцией  , поступает на входы линии задержки 16 (
, поступает на входы линии задержки 16 ( нс) и аттенюатора 17 (устройства ослабления сигнала; в данном случае ослабление составляет 6 дБ), а выходные сигналы
нс) и аттенюатора 17 (устройства ослабления сигнала; в данном случае ослабление составляет 6 дБ), а выходные сигналы  и
и  этих узлов подаются на входы компаратора 18 (устройства сравнения напряжений). В тот момент, когда окажется равным , компаратор вырабатывает отсчетный импульс, используемый далее для оценки расстояния .
этих узлов подаются на входы компаратора 18 (устройства сравнения напряжений). В тот момент, когда окажется равным , компаратор вырабатывает отсчетный импульс, используемый далее для оценки расстояния .
Приведем некоторые технические характеристики данные для бортовой аппаратуры дальномерного канала РСП:
Чувствительность радиоприемного устройства, дБ  :
:
- для области дальнометрии повышенной точности 60
- для области дальнометрии обычной точности 80
- потребляемая мощность от сети 115 В, 400 Гц,  75
75
Масса, кг:
- всего комплекта(без кабелей) 5,4
- радиопередающего и радиоприемного устройств 4,77
- объем радиопередающего и радиоприемного устройств, дм3 7,6
Угломерные каналы РСП
Задачей функционирования угломерных каналов РСП является удержание приближающегося к ВПП самолета на заданной траектории (рис. 4.16,а) снижения путем раздельного формирования информации об отклонениях снижающегося самолета от линий курса и глиссады. При этом задачу формирования информации об отклонении реальной траектории от линии курса выполняет азимутальный угломерный канал РСП, а от глиссады – угломестный угломерный канал РСП.
Отметим, что если в азимутальном угломерном канале вычисление отклонения самолета от линии курса производится непосредственно – путем определения текущего азимута самолета, то нахождение отклонения траектории снижающегося самолета от глиссады происходит в угломестном угломерном канале РСП опосредованным образом – при помощи измерения угла места подлетающего самолета с последующим пересчетом полученного значения в текущий угол наклона глиссады и сравнением данного текущего угла с заранее известной величиной требуемого угла наклона глиссады.
Основное радиооборудование каждого из двух угломерных каналов РСП включает в себя соответствующий наземный радиомаяк и бортовое радиооборудование. При этом если азимутальный и угломестный радиомаяки являются самостоятельными наземными радиомаяками (рис. 4.16, б), то бортовое радиооборудование (в силу сходства реализуемых аппаратурных функций) выполняется общим для азимутального и угломестного угломерных каналов РСП, а работа указанного бортового радиооборудования осуществляется попеременно (т.е. раздельным образом) во времени для азимутального и угломестного угломерных каналов РСП.
Приведем некоторые основные параметры угломерных каналов РСП:
Зона действия:
· по азимуту (относительно оси ВПП) 
· по углу места (относительно горизонтальной плоскости,
проходящей через антенну угломестного радиомаяка)  ,
,
т.е. 
Частота формирования информации в бортовом радиооборудовании, измерений в с:
· об азимуте самолета 13, либо 39
· об угле места самолета 39
· диапазон частот заполнения радиосигналов, МГц 5000…5750
Рассмотрим технические особенности функционирования каждого из угломерных каналов РСП.
Азимутальный угломерный канал РСП. Азимутальный угломерный канал РСП предназначен для измерения текущего азимута снижающегося самолета. Аппаратурно-азимутальный угломерный канал РСП состоит из наземного азимутального радиомаяка (который входит в состав канала, информирующего об отклонении подлетающего самолета от продольной оси ВПП, и потому расположен на указанной оси) и бортового радиооборудования (которое выполняет измерение азимута снижающегося самолета).
Функционирование наземного азимутального радиомаяка осуществляется следующим образом.
Азимутальный радиомаяк обладает двумя излучающими антеннами – остронаправленной и слабонаправленной.
Остронаправленная антенна обычно реализуется в виде фазированной антенной решетки (ФАР), обладающей достаточно большим количеством (80-100) излучающих элементов (модулей). В условиях обеспечения строгого контроля амплитуд и фаз радиоколебаний, излучаемых этими модулями, формируется узкая в горизонтальной плоскости и сравнительно широкая в вертикальной плоскости диаграмма направленности  азимутального радиомаяка. В частности, если размеры ФАР составляют в горизонтальной плоскости 3,66 м, а в горизонтальной – 1,22 м, то ширина
азимутального радиомаяка. В частности, если размеры ФАР составляют в горизонтальной плоскости 3,66 м, а в горизонтальной – 1,22 м, то ширина  указанной диаграммы направленности в горизонтальной (азимутальной) плоскости равняется 1º, чем подтверждается отсронаправленность антенны (ровно как и диаграммы направленности); что касается ширины
указанной диаграммы направленности в горизонтальной (азимутальной) плоскости равняется 1º, чем подтверждается отсронаправленность антенны (ровно как и диаграммы направленности); что касается ширины  этой диаграммы в вертикальной (угломестной) плоскости, то она имеет величину порядка 3…5º. При иных размерах ФАР значение и будут, разумеется, другими.
этой диаграммы в вертикальной (угломестной) плоскости, то она имеет величину порядка 3…5º. При иных размерах ФАР значение и будут, разумеется, другими.
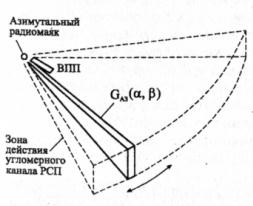 |
| Рис. 4.20. Диаграмма направленности азимутального радиомаяка |
Как отмечалось ранее, важным достоинством ФАР является возможность достаточно быстрого (безынерционного) перемещения диаграммы направленности в пространстве. В ФАР азимутального радиомаяка амплитуды и фазы управляющих напряжений, подводимых к модулям, подбираются таким образом, что диаграмма направленности осуществляет перемещение (сканирует) в азимутальной плоскости (рис. 4.20). При этом данное перемещение выполняется как в одну, так и в другую стороны, что позволяет осуществить облучение всей зоны действия угломерного канала РСП.
В своем движении (как в ту, так и в другую стороны) ФАР излучает непрерывное немодулированное радиоколебание. Поэтому, когда диаграмма направленности проходит мимо самолета, находящегося в зоне действия угломерного канала РСП, то на вход бортового радиоприемного устройства поступает радиоимпульс, длительность  которого равна величине:
которого равна величине:
 ,
,
где  – угловая скорость перемещения диаграммы направленности по азимуту, что, в частности, при скорости сканирования 0,02 град/мкс и ширине диаграммы направленности 1…4º составляет 50…200 мкс, а огибающая этого радиоимпульса повторяет диаграмму . Эта ситуация формирования радиоимпульсов для движения в одну и другую стороны показана на рис. 4.21.
– угловая скорость перемещения диаграммы направленности по азимуту, что, в частности, при скорости сканирования 0,02 град/мкс и ширине диаграммы направленности 1…4º составляет 50…200 мкс, а огибающая этого радиоимпульса повторяет диаграмму . Эта ситуация формирования радиоимпульсов для движения в одну и другую стороны показана на рис. 4.21.
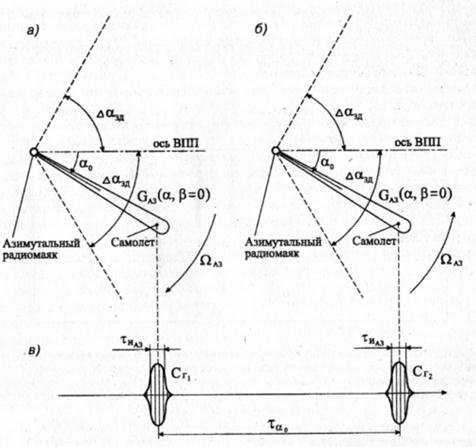 |
Рис. 4.21. Проекции зоны действия угломерного канала РСП на горизонтальную плоскость при движении диаграммы направленности азимутального радиомаяка по (а) и против (б) часовой стрелки и радиосигналы (в) на входе бортового радиоприемного устройства от облучения самолета данной диаграммой направленности:  – азимутальный размер указанной зоны действия. – азимутальный размер указанной зоны действия. |
Отметим, что непрерывное излучение проводится ФАР только внутри (в пределах  ) зоны действия угломерного канала РСП. Когда же диаграмма оказывается на границе этой зоны, данное излучение прекращается. Возникает своеобразная пауза, во время которой начинает излучать слабонаправленная антенна.
) зоны действия угломерного канала РСП. Когда же диаграмма оказывается на границе этой зоны, данное излучение прекращается. Возникает своеобразная пауза, во время которой начинает излучать слабонаправленная антенна.
Излучение слабонаправленной антенны состоит из информационного сигнала ИСг и радиоимпульсов клиренса (Кл и Кп).
Информационный сигнал ИСг состоит из нескольких примыкающих друг к другу радиоимпульсов различной длительности. Каждый из данных радиоимпульсов предназначен для выполнения той или иной функции, например, обеспечения синхронизации (по несущей частоте) работы ФАР и бортового радиоприемного устройства, формирования опорного (начального для данного периода сканирования) момента времени для работы бортового радиооборудования, задания местоположения наземного азимутального радиомаяка, определения внезонного положения самолета, тестирования и т. д.
Радиоимпульсы клиренса предназначены для идентификации (с помощью бортовой радиоаппаратуры) местоположения самолета – находится этот самолет в пределах зоны действия угломерного канала РСП или располагается вне данной зоны.
Такова общая картина радиоизлучений, осуществляемых наземным азимутальным радиомаяком.
Тогда радиосигналы, поступающие на вход бортового радиоприемного устройства, могут быть представлены на рис. 6.4.6,в и рис. 4.22,б,в.
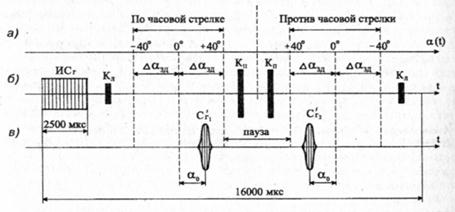 |
Рис. 4.22. Угловые координаты (а) местонахождения максимума диаграммы направленности азимутального радиомаяка за один период сканирования при движении указанной диаграммы по и против часовой стрелки; радиосигналы, принятые бортовым радиоприемным устройством от слабонаправленной (б) и остронаправленной (в) излучающих антенн наземного азимутального радиомаяка:  – азимутальный размер зоны действия угломерного канала РСП (в данном случае – азимутальный размер зоны действия угломерного канала РСП (в данном случае  ); );  – угловое положение самолета в горизонтальной плоскости относительно оси ПП; ИСг – информационный сигнал; Кл и Кп – левый и правый радиоимпульсы клиренса; – угловое положение самолета в горизонтальной плоскости относительно оси ПП; ИСг – информационный сигнал; Кл и Кп – левый и правый радиоимпульсы клиренса;  и и  – радиосигналы, принятые на борту от остронаправленной диаграммы направленности при движении ее по и против часовой стрелки. – радиосигналы, принятые на борту от остронаправленной диаграммы направленности при движении ее по и против часовой стрелки. |
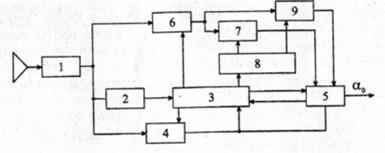 |
| Рис. 4.23. Структурная схема бортового оборудования азимутального угломерного канала РСП: 1 – бортовое радиоприемное устройство; 2 – устройство обработки информационного сигнала ИСг; 3 – синхронизирующее устройство; 4 –устройство обработки сигналов клиренса (Кл, Кп); 5 –вычислительное устройство; 6 – устройство обработки сигналов ( и ) от остронаправленной диаграммы направленности азимутального радиомаяка; 7 – первая ключевая схема; 8 – генератор счетных импульсов; 9 – вторая ключевая схема. |
Радиосигналы, излученные наземным азимутальным маяком, принимаются бортовой антенной рупорного типа, установленной либо в носовой части фюзеляжа, либо под фюзеляжем. Далее эти радиосигналы проходят через бортовое радиоприемное устройство 1, и соответствующие видеосигналы подаются на три узла – на устройство обработки информационного сигнала ИСг 2 (с выхода которого на синхронизирующее устройство 3 поступают видеоимпульсы, соответствующие опорному моменту времени, внезонной индикации, тестированию и т.д.0, на устройство обработки сигналов клиренса 4 (выходные видеоимпульсы которого через синхронизирующее устройство 3 и вычислительное устройство 5 воздействуют далее на систему управления самолетом, направляя его в зону действия угломерного канала РСП) и на устройство обработки сигналов 6, принятых от остронаправленной ФАР наземного азимутального радиомаяка.
Следует отметить, что синхронизирующее устройство 3, функционирующее под воздействием выходных видеоимпульсов устройства обработки информационного сигнала ИСг 2, открывает в нужные моменты (см. рис. 4.22) устройство обработки сигналов клиренса 4 и устройство обработки сигналов от остронаправленной ФАР. Кроме того, выходные видеоимпульсы синхронизирующего устройства 3 включают генератор счетных импульсов 8 (а также отключают его) и задают тактность работы вычислительному устройству 5.
На рис. 4.22,б показано, что наземный азимутальный радиомаяк излучает (а бортовая рупорная антенна принимает) два сигнала клиренса – левый (Кл) и правый (КП).
В устройстве обработки сигналов клиренса 4 происходит сравнение амплитуд этих сигналов. Если амплитуда одного из них меньше амплитуды другого на величину меньшую, чем 15 дБ, это означает, что самолет находится в пределах зоны действия угломерного канала РСП. В противном случае самолет выполняет полет вне данной зоны и проводится анализ соотношения амплитуд Кл и Кп. Если имеет место неравенство Кл > Кп, это означает, что самолет уклонился влево от указанной зоны действия, и на выходе вычислительного устройства 5 вырабатывается сигнал «Лети вправо». Когда же присутствует неравенство Кл < Кп, вычислительное устройство 5 формирует сигнал «лети влево».
Наконец, более точный вывод самолета, располагающегося вне зоны угломерного канала РСП, на продольную ось ВПП выполняется по выходным видеосигналам устройства 6 – эти выходные видеосигналы соответствуют радиоимпульсам и , показанным на рис. 4.21,в и 4.22,в. Данные выходные видеосигналы поступают на первую 7 и вторую 9 ключевые схемы (видеосигнал, соответствующий , подается на ключевую схему 7, а видеосигнал, соответствующий – на ключевую схему 9), в которых заполняются счетными импульсами, вырабатываемыми генератором счетных импульсов 8. Количество счетных импульсов, соответствующее длительностям этих видеоимпульсов (а фактически длительностям и ), для нахождения временных координат максимумов и вводится в вычислительное устройство 5. Кроме того, в указанном вычислительном устройстве определяется также величина  (см. рис. 4.21,в), выраженная количеством тех же счетных импульсов.
(см. рис. 4.21,в), выраженная количеством тех же счетных импульсов.
После получения этих величин вычислительное устройство 5 определяет значение азимутального угла  самолета. Далее величина выводится на бортовую систему управления полетом для снижения этой величины до нуля, т.е. до совпадения в горизонтальной плоскости проекции курсовой линии самолета с продольной осью ВПП.
самолета. Далее величина выводится на бортовую систему управления полетом для снижения этой величины до нуля, т.е. до совпадения в горизонтальной плоскости проекции курсовой линии самолета с продольной осью ВПП.
Угломестный угломерный канал РСП. Угломестный угломерный канал РСП предназначен для измерения текущего углового рассогласования между углом (заранее известным на борту) наклона линии глиссады к плоскости земной поверхности и текущим углом места снижающегося самолета.
Аппаратурно угломестный угломерный канал РСП состоит из наземного угломестного радиомаяка (который входит в состав канала, информирующего об отклонении подлетающего самолета от линии глиссады, и может быть несколько смещен относительно продольной оси ВПП) и бортового радиооборудования (которое выполняет измерение угла места снижающегося самолета и вычисляет разность между требуемым углом наклона линии глиссады и измеренным углом места). Напомним, что бортовое радиооборудование для угломестного угломерного канала РСП является общим с бортовым оборудованием для азимутального угломерного канала РСП (их работа осуществляется поочередно, методом разделения во времени).
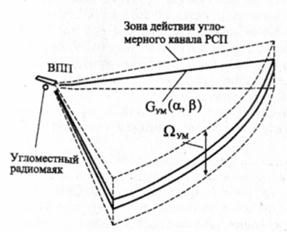 |
Рис. 4.24. Диаграмма направленности  угломестного радиомаяка угломестного радиомаяка |
Функционирование наземного угломестного угломерного радиомаяка происходит следующим образом.
ФАР данного радиомаяка формирует диаграмму направленности узкую (около 1º) в вертикальной плоскости и широкую (80…120º) в горизонтальной плоскости, которая за счет электронного управления элементами (модулями) ФАР выполняет сканирование вверх и вниз в пределах зоны действия угломерного канала РСП – рис. 6.4.9. При этом сканирование (качание диаграммы направленности) осуществляется с постоянной угловой скоростью  , нижний предел которой составляет 0,01…0,02 град/мкс. При этом ФАР наземного угломестного радиомаяка излучает в пространство непрерывное немодулированное радиоколебание.
, нижний предел которой составляет 0,01…0,02 град/мкс. При этом ФАР наземного угломестного радиомаяка излучает в пространство непрерывное немодулированное радиоколебание.
На рис. 4.25 изображен процесс получения радиоимпульсов  и
и  на входе бортового радиоприемного устройства – эти радиоимпульсы формируются во время прохождения диаграммы направленности мимо самолета. Поэтому длительность
на входе бортового радиоприемного устройства – эти радиоимпульсы формируются во время прохождения диаграммы направленности мимо самолета. Поэтому длительность  данных импульсов равна:
данных импульсов равна:
 , (4.11)
, (4.11)
где  – ширина диаграммы направленности в вертикальной (угломестной) плоскости, огибающая указанных радиоимпульсов повторяет форму диаграммы направленности (при фиксированном значении угла
– ширина диаграммы направленности в вертикальной (угломестной) плоскости, огибающая указанных радиоимпульсов повторяет форму диаграммы направленности (при фиксированном значении угла  ), а выходная величина
), а выходная величина  бортового радиооборудования находится согласно соотношению:
бортового радиооборудования находится согласно соотношению:
 , (4.12)
, (4.12)
где  – угол места самолета;
– угол места самолета;  – угол наклона линии глиссады к плоскости земной поверхности (обычно этот угол известен на борту заранее и достаточно мал: 1…3º);
– угол наклона линии глиссады к плоскости земной поверхности (обычно этот угол известен на борту заранее и достаточно мал: 1…3º);  – временной интервал между радиоимпульсами и ;
– временной интервал между радиоимпульсами и ;  – интервал времени между смежными двумя (вверх и вниз) прохождениями максимума диаграммы направленности линии глиссады (при
– интервал времени между смежными двумя (вверх и вниз) прохождениями максимума диаграммы направленности линии глиссады (при  ).
).
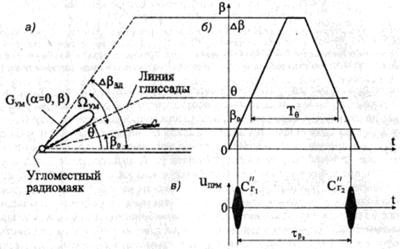 |
Рис. 4.25. Проекция зоны действия угломерного канала РСП на вертикальную плоскость при движении диаграммы направленности угломерного радиомаяка вверх и вниз (а); зависимость угла места  диаграммы направленности от времени (б); радиосигналы на входе бортового радиоприемного устройства (в): диаграммы направленности от времени (б); радиосигналы на входе бортового радиоприемного устройства (в):  – угломестный размер зоны действия угломерного канала РСП; – угол наклона линии глиссады к земной поверхности. – угломестный размер зоны действия угломерного канала РСП; – угол наклона линии глиссады к земной поверхности. |
Реализация алгоритма (6.4.3) осуществляется с помощью бортового радиооборудования угломестного угломерного канала РСП, структурная схема которой приведена на рис. 4.26. Заметим, что поскольку измерение величин  и 5р происходит при помощи одного и того же радиооборудования, то нумерация структурных узлов, изображенных на рис. 4.26, повторяет и продолжает нумерацию структурных узлов, показанных на рис. 4.23.
и 5р происходит при помощи одного и того же радиооборудования, то нумерация структурных узлов, изображенных на рис. 4.26, повторяет и продолжает нумерацию структурных узлов, показанных на рис. 4.23.
Радиоколебания принятые рупорной бортовой антенной, поступают (в виде радиоимпульсов и ) сначала на вход бортового радиоприемного устройства 1, а далее на устройство обработки 6, которое формирует видеосигналы, соответствующие радиоимпульсам и . При этом синхронизирующее устройство 3 осуществляет селекцию данных радиоимпульсов во времени (эта операция необходима, так как в зоне действия угломерного канала РСП могут оказаться и другие самолеты, переизлучения от которых способны образовать на входе бортового радиоприемного устройства ложные радиосигналы), запускает генератор счетных импульсов 8 и выполняет синхронизацию вычислительного устройства 5.
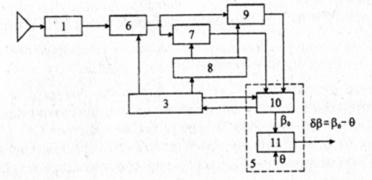 |
| Рис. 4.26. Структурная схема бортового радиооборудования угломестного угломерного канала РСП: 1 – бортовое радиоприемное устройство; 3 – синхронизирующее устройство; 5 – вычислительное устройство; 6 – устройство обработки сигналов и ; 7 – первая ключевая схема; 8 – генератор счетных импульсов; 9 – вторая ключевая схема; 10 – устройство вычисления угла места самолета ; 11 – устройство вычитания; – угол наклона линии глиссады к земной поверхности. |
С выхода устройства обработки 6 видеосигналы подаются на первую 7 и вторую 9 ключевые схемы: видеосигнал, соответствующий радиоимпульсу , поступает на схему 7, а видеосигнал, соответствующий радиоимпульсу – на схему 9. Под воздействием этих видеосигналов ключевые схемы 7 и 9 открываются, и счетные импульсы в течение действия этих видеосигналов вводятся в устройство вычисления 10 угла места самолета . Поскольку количество счетных импульсов, поданных в устройство 10 с выходов ключевых схем 7 и 9, пропорционально длительностям видеосигналов, поступивших на эти схемы, то устройство 10 оказывается способным определить как временное положение максимума каждого из данных видеосигналов, так и временной интервал  между указанными максимумами. С учетом заранее известных данных о
между указанными максимумами. С учетом заранее известных данных о  и
и  устройство 10 способно по полученным значениям
устройство 10 способно по полученным значениям  и вычислить величину угла места самолета .
и вычислить величину угла места самолета .
Поскольку задачей бортового радиооборудования угломестного угломерного канала РСП является не столько нахождение р0. сколько выработка корректирующего значения  (для удержания снижающегося самолета на линии глиссады с помощью бортовой системы управления полетом), то выходным узлом данного бортового радиооборудования является устройство вычитания 11 формирующее разность
(для удержания снижающегося самолета на линии глиссады с помощью бортовой системы управления полетом), то выходным узлом данного бортового радиооборудования является устройство вычитания 11 формирующее разность  . При этом указанное устройство вычитания 11 реализуется внутри вычислительного устройства 5 в качестве отдельного функционального узла.
. При этом указанное устройство вычитания 11 реализуется внутри вычислительного устройства 5 в качестве отдельного функционального узла.
Приведем некоторые технические характеристики бортового радиооборудования угломерного канала РСП:
Погрешность измерения, град:
- по азимуту 0,015…0,017
- по углу места 0,01…0,017
- потребляемая мощность, Вт 30
- масса основного блока, кг 5…6
- объем основного блока, дм3 5,6

