 2015-04-17
2015-04-17 2001
2001Радиосистемой измерения малых высот (РСМВ) называется дальномерная навигационная автономная радиосистема, устанавливаемая на борту летательного аппарата и предназначенная для определения текущей высоты полета этого летательного аппарата в условиях (в основном) режима посадки. Обычно максимальное значение высоты полета, при которой используется РСМВ, не превышает 1500 м.
Свойство автономности позволяет применять РСМВ как для самостоятельного определения высоты полета, так и в качестве узла, входящего в самолетную систему траекторного управления.
Наиболее стандартной является следующая ситуация: при заходе на посадку в систему траекторного управления, начиная с высоты примерно 200 м, поступают сигналы от РСМВ, которые служат для уменьшения коэффициента передачи по каналу глиссады от максимального значения до нуля на высоте начала выравнивания (15...20 м). Одновременно эти же сигналы используются для снижения вертикальной составляющей скорости (до значения 0,45 м/с при начале выравнивания) и уменьшения (примерно в два раза) коэффициента передачи системы траекторного управления по каналу курса по мере снижения самолета.
Рассмотрим принцип функционирования РСМВ.
Существуют различные типы РСМВ, которые отличаются друг от друга видом модуляции излучаемого и характером обработки принимаемого сигналов. Наиболее часто используется РСМВ, основанная на частотном методе измерения высоты – структурная схема данной РСМВ показана на рис. 4.12, а временные диаграммы поясняющие принцип ее работы, приведены на рис. 4.13.
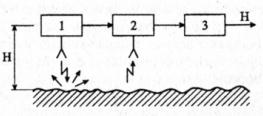 |
| Рис. 4.12. Структурная схема РСМВ: 1 – радиопередающее устройство; 2 – радиоприемное устройство; 3 – измерительное устройство. |
Радиосигнал, излучаемый радиопередающим устройством 1 вертикально вниз, в сторону земной поверхности, является непрерывным во времени и модулированным по частоте.
В качестве закона частотной модуляции избрана линейная зависимость, т. е. в соответствии с модулирующим напряжением  , имеющим линейно-нарастающие и линейно-спадающие участки, происходит и изменение частоты
, имеющим линейно-нарастающие и линейно-спадающие участки, происходит и изменение частоты  излучаемого радиосигнала. Указанное изменение является циклически повторяющимся (с периодом модуляции
излучаемого радиосигнала. Указанное изменение является циклически повторяющимся (с периодом модуляции  ).
).
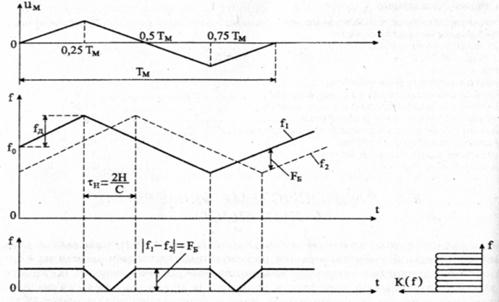 |
Рис. 4.13. Временные диаграммы, поясняющие принцип работы РСМВ: – модулирующее напряжение;  – период модуляции; – период модуляции;  – центральная частота излучаемого радиосигнала; – переменная во времени частота излучаемого радиосигнала; – центральная частота излучаемого радиосигнала; – переменная во времени частота излучаемого радиосигнала;  – частота девиации; – частота девиации;  – переменная во времени частота принимаемого радиосигнала; – переменная во времени частота принимаемого радиосигнала;  – частота биений (модуль разностной частоты между частотами и ); – частота биений (модуль разностной частоты между частотами и );  – время запаздывания принятого радиосигнала относительно излученного; – время запаздывания принятого радиосигнала относительно излученного;  – высота полета; – высота полета;  – амплитудно-частотные характеристики узкополосных измерительных фильтров. – амплитудно-частотные характеристики узкополосных измерительных фильтров. |
Одновременно с излучением в сторону земной поверхности тот же излучаемый радиосигнал (но со значительно меньшей амплитудой) поступает на один из входов радиоприемного устройства 2. На второй вход этого устройства подается радиосигнал, отраженный от земной поверхности. Частота заполнения этого радиосигнала обозначена как ; при этом закон изменения частоты повторяет закон изменения частоты , а одинаковые значения частот и , расположенные на соответственных линейных участках, смещены относительно друг друга на величину времени распространения радиосигнала от летательного аппарата до земной поверхности и обратно:
 , (4.6)
, (4.6)
где – высота полета самолета или вертолета;  – скорость распространения электромагнитных волн.
– скорость распространения электромагнитных волн.
Частоты и , радиосигналов, поступивших на вход радиоприемного устройства 2, сравниваются между собой, формируя частоту биений как модуль разности частот и , т.е.
 (4.7)
(4.7)
и измерительное устройство 3 по данной частоте биений осуществляет оценку высоты полета ; при этом используется следующий алгоритм:
 , (4.8)
, (4.8)
где  – частота девиации;
– частота девиации;  – частота модуляции; откуда:
– частота модуляции; откуда:
 . (4.9)
. (4.9)
Развернутая структурная схема РСМВ, реализующая частотный метод измерения высоты, представлена на рис. 4.14. При этом нумерация блоков этой схемы продолжает нумерацию узлов, приведенных на рис. 4.12.
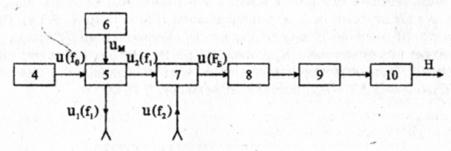 |
Рис. 4.14. Развернутая структурная схема РСМВ с использованием линейной частотной модуляции: 4 – генератор радиоколебаний  частоты ; 5 – частотный модулятор и высокочастотный усилитель; 6 – генератор модулирующего напряжения ; 7 – балансный смеситель; 8 – усилитель низкой частоты; 9 – блок узкополосных измерительных фильтров; 10 – вычислитель. частоты ; 5 – частотный модулятор и высокочастотный усилитель; 6 – генератор модулирующего напряжения ; 7 – балансный смеситель; 8 – усилитель низкой частоты; 9 – блок узкополосных измерительных фильтров; 10 – вычислитель. |
Работа данной РСМВ заключается в следующем.
Генератор 4 вырабатывает непрерывное гармоническое колебание частоты (обычно в РСМВ используется значение частоты вблизи 4300 МГц). Это колебание подается на первый вход частотного модулятора, входящего в блок 5. На второй вход данного частотного модулятора от генератора 6 подается линейно-изменяющееся модулирующее напряжение , имеющее участки нарастания и спада. Частота модуляции  обычно лежит в пределах от 120 Гц до 150 Гц.
обычно лежит в пределах от 120 Гц до 150 Гц.
В результате взаимодействия напряжений и в частотном модуляторе на его выходе формируется непрерывное во времени и линейно-модулированное по частоте (обычно частота девиации  выбирается из интервала 40...60 МГц) напряжение , которое далее вводится на первый вход балансного смесителя 7. Кроме того, напряжение
выбирается из интервала 40...60 МГц) напряжение , которое далее вводится на первый вход балансного смесителя 7. Кроме того, напряжение  усиливается по амплитуде в усилителе, входящем в блок 5, и выходное напряжении
усиливается по амплитуде в усилителе, входящем в блок 5, и выходное напряжении  этого усилителя подается на радиопередающую антенну (рупорного типа, имеющую диаграмму направленности
этого усилителя подается на радиопередающую антенну (рупорного типа, имеющую диаграмму направленности  шириной
шириной  °), которая осуществляет излучение электромагнитного радиосигнала в сторону земной поверхности.
°), которая осуществляет излучение электромагнитного радиосигнала в сторону земной поверхности.
Отраженный от земной поверхности электромагнитный радиосигнал поступает на радиоприемную антенну (рупорного типа с шириной  диаграммы направленности, равной 40...60°), а с ее выхода напряжение
диаграммы направленности, равной 40...60°), а с ее выхода напряжение  вводится на второй вход балансного смесителя 7. Балансный смеситель 7 вырабатывает низкочастотное напряжение
вводится на второй вход балансного смесителя 7. Балансный смеситель 7 вырабатывает низкочастотное напряжение  частоты биений
частоты биений  , которое затем усиливается в усилителе низкой частоты 8, после чего подается на блок узкополосных измерительных фильтров 9. Амплитудно-частотные характеристики
, которое затем усиливается в усилителе низкой частоты 8, после чего подается на блок узкополосных измерительных фильтров 9. Амплитудно-частотные характеристики  этих фильтров показаны на рис. 4.13. На выходе блока 9 формируется номер того узкополосного измерительного фильтра, в полосу пропускания которого попала частота биений . Вычислитель 10 преобразует номер сработавшего узкополосного измерительного фильтра в значение измеряемой высоты полета
этих фильтров показаны на рис. 4.13. На выходе блока 9 формируется номер того узкополосного измерительного фильтра, в полосу пропускания которого попала частота биений . Вычислитель 10 преобразует номер сработавшего узкополосного измерительного фильтра в значение измеряемой высоты полета  летательного аппарата.
летательного аппарата.
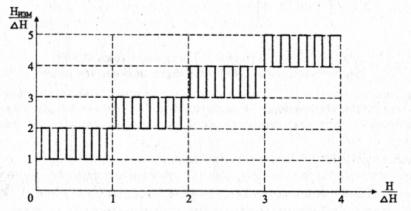 |
Рис. 4.15. Зависимость относительной величины  измеряемой высоты от относительной величины истинной высоты измеряемой высоты от относительной величины истинной высоты  для РСМВ с использованием линейной частотной модуляции для РСМВ с использованием линейной частотной модуляции |
Отметим, что минимальная высота  , измеряемая данной РСМВ, соответствует равенству
, измеряемая данной РСМВ, соответствует равенству  и определяется из соотношения (4.10):
и определяется из соотношения (4.10):
 (4.10)
(4.10)
Особенностью работы рассматриваемой РСМВ является наличие дискретности  отсчета высоты , которая не зависит от значения высоты . Существование указанной дискретности обусловлено различными (и к тому же случайными) соотношениями фаз между напряжениями и , а влияние этой дискретности выражается в случайных изменениях измеряемой высоты полета на величины
отсчета высоты , которая не зависит от значения высоты . Существование указанной дискретности обусловлено различными (и к тому же случайными) соотношениями фаз между напряжениями и , а влияние этой дискретности выражается в случайных изменениях измеряемой высоты полета на величины  относительно истинной высоты полета (рис. 4.15). При этом в зависимости от значения разности фаз между напряжениями и величина
относительно истинной высоты полета (рис. 4.15). При этом в зависимости от значения разности фаз между напряжениями и величина  может равняться либо , либо
может равняться либо , либо  . Из этого следует, что снижения дискретности
. Из этого следует, что снижения дискретности  можно достичь увеличением частоты девиации . При значении
можно достичь увеличением частоты девиации . При значении  МГц величина
МГц величина  составляет величину 0,75 м.
составляет величину 0,75 м.
Достоинством РСМВ является достаточно низкая мощность излучаемая радиопередающей антенной: 0,1…0,4 Вт.
Пример технических характеристик типового радиовысотомера малых высот были приведены в подпункте 3.2.2. Они включают такие параметры как:
- диапазон измеряемых высот;
- ошибки измерения;
- мощность излучения;
- параметры радиосигнала;
- масса, объем.

