 2015-04-30
2015-04-30 666
666Система уравнений динамики модуля БМТ имеет вид:
 (1)
(1)
где  – угловая скорость вращения выходного звена (нагрузки); ωXX – угловая скорость идеального холостого хода; u – кинематическое передаточное отношение ПЗВМ; η – КПД ПЗВМ; U упр – управляющее напряжение на входе двигателя; U 0 – номинальное напряжение двигателя; М 2 – момент нагрузки в суставе; М П – пусковой момент двигателя; T γ – электромеханическая постоянная времени привода.
– угловая скорость вращения выходного звена (нагрузки); ωXX – угловая скорость идеального холостого хода; u – кинематическое передаточное отношение ПЗВМ; η – КПД ПЗВМ; U упр – управляющее напряжение на входе двигателя; U 0 – номинальное напряжение двигателя; М 2 – момент нагрузки в суставе; М П – пусковой момент двигателя; T γ – электромеханическая постоянная времени привода.
Момент нагрузки в суставе М 2 зависит от величины угла разгибания φ2, мышечного тонуса и показателя контрактуры по степенному закону:
 , (2)
, (2)
где М 0 – момент сопротивления, вызванным начальным мышечным тонусом сгибателей; М пр – момент сопротивления при полном разгибании сустава на угол φпр; k – показатель контрактуры.
Показатель контрактуры k меняется в пределах от 0 до 1. Чем выше этот показатель, тем меньше подвижность в суставе, которая ограничена пороговым значением момента нагрузки М кр. Критическое значение М кр соответствует значению, выше которого наступает фаза контрактуры (например, возникают болезненные ощущения). На рис. 1 показана зависимость момента нагрузки от угла разгибания при различных показателях контрактуры на примере локтевого сустава (за начальное положение принято положение с углом 90º). Для данной модели при показателе k = 0,1 амплитуда подвижности сустава составляет 56,2º, при k = 0,05 – 71,1º, при k = 0,01 – 85,9º, при k = 0,001 – 89,6º.
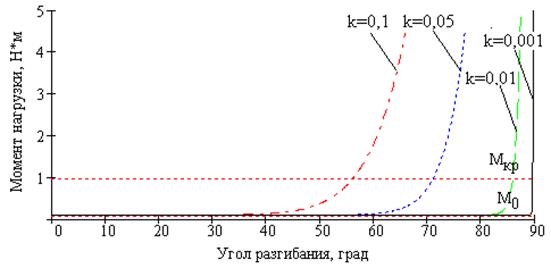
Рис. 1. Закон изменения момента нагрузки при различных значениях показателя контрактуры
Показатель контрактуры не является постоянным параметром, а уменьшается в процессе разработки. Для формализации этой зависимости следует обладать достаточно большим объемом клинических данных, кроме того, эта зависимость, по-видимому, индивидуальна для каждого пациента.
В приводе БМТ реализован алгоритм управления движением шарнирно-рычажной системы тренажера для разработки контрактур с уменьшением болевых ощущений. Действие алгоритма основано на учете величины момента сопротивления. Привод совершает разгибательное движение в суставе, пока сопротивление не достигнет порогового значения М кр (этот момент фиксируется датчиком тока, т.к. потребляемый ток прямо пропорционален преодолеваемой нагрузке). В этом случае привод переключается на осциллирующий режим, заставляя сустав совершать быстрые колебательные движения малой амплитуды. Амплитуда осциллирующего напряжения U 1 определяется из условия прохождения заданного угла разгибания α за полупериод. Такой режим способствует расслаблению сгибательных мышц и снижению болевых ощущений. Осциллирующий режим функционирует некоторый период времени (от нескольких секунд до нескольких минут), задаваемый программно, после чего привод возвращается в исходное положение, заставляя сустав сгибаться и давая возможность для восстановления локального кровообращения и релаксации разгибателей. Затем цикл повторяется вновь.
Для проверки работоспособности предложенного алгоритма проведен комплекс исследований по имитационному моделированию динамики БМТ в реальном времени. Заметим, что для работы алгоритма не важен точный вид зависимости (2) и тем более значение показателя контрактуры (который существенно привязан к предложенной модели). Но для имитационной модели необходимо формализованное описание зависимости усилия сопротивления разгибанию от угла разгибания, причем с учетом положительной динамики в процессе разработки. На рис. 2 представлены результаты имитационного моделирования: показаны диаграммы изменения угла разгибания. Для наглядности предложен идеализированный случай, когда каждая осцилляция эффективна – после каждой осцилляции показатель степени 1/ k в выражении (2) увеличивается на единицу. Режим осцилляции – Т осц = 0,1 с, α = 20º. Подвижность в суставе до начала разработки составляла 56,1º, в конце цикла разработки – 80,1º.
Рис. 2. Диаграмма изменения угла разгибания за цикл разработки
Пульт управления состоит из кнопочного пульта из 16 клавиш и двухстрочного алфавитно-цифрового ЖКИ DV-16252. На индикацию выводится информация о режимах работы, значения параметров управления: М кр – пороговое значение момента сопротивления, характеризующего наступление контрактуры; М – число циклов разработки в течение сеанса разработки; N – число осцилляций в течение цикла разработки; Т осц – полупериод осцилляции; α – амплитуда осцилляции. С помощью клавиатуры возможно изменение указанных параметров.
Разработанная система управления мехатронным приводом БМТ состоит из однокристального 8-миразрядного микроконтроллера (МК) AT89S8252 фирмы ATMEL, блока управления электродвигателем и пульта управления.
В приводе используется бесконтактная синхронная трехфазная машина, работающая в режиме вентильного двигателя. Для коммутации обмоток применен силовой трехфазный транзисторный мост CPV362M4U. Для согласования управляющих выходных сигналов МК с входами силового моста применен драйвер IR2133S. В качестве датчика тока используется шунт R14. Для регулирования скорости вращения МК соответствии с запрограммированным алгоритмом генерирует ШИМ-сигналы для силовых ключей.
В начале работы осуществляется настройка аппаратных и программных устройств микроконтроллера (таймер, порты ввода-вывода, система прерываний, внутренних регистров). Далее система управления переходит в режим управления двигателем и ожидания приема команды от пульта управления.








