2015-05-05
2015-05-05 14025
14025Клиновые зажимы, как правило, применяют в качестве промежуточного звена в сложных зажимных системах. Они просты в изготовлении, легко размещаются в приспособлении, позволяют увеличить и изменять направление передаваемой силы. В приспособлениях в основном применяют плоские клиновые механизмы, которые бывают одно и двускосыми, с трением скольжения, качения или комбинированного трения.
При расчете клинового механизма решаются следующие задачи:
- Выбирается рабочий угол наклона клина  .
.
- Определяется необходимое зажимное усилие  , позволяющее получить требуемую силу зажима
, позволяющее получить требуемую силу зажима  .
.
- Рассчитывается величина перемещения клина, в зависимости от длины хода плунжеров.
Обычно при конструировании приспособления стремятся создать самотормозящий клиновой механизм. При этом должно обеспечиваться условие самоторможения, при котором
 ,
,
где  - угол трения между плунжером и клином;
- угол трения между плунжером и клином;  - угол трения между клином и опорной поверхностью.
- угол трения между клином и опорной поверхностью.
Для клинового механизма с трением скольжения в двух звеньях  ; при комбинированном тернии
; при комбинированном тернии  ; при трении качения в двух парах
; при трении качения в двух парах  .
.
Применение роликов позволяет увеличить к.п.д. механизма, сделать его работу плавной без заеданий и срывов. Но при этом механизм получается сложнее.
Рассмотрим методику определения зажимного усилия односкосого клинового механизма (Рис.5.14). Зажимной механизм при закреплении заготовки в приспособлении находится в состоянии силового равновесия. Наша задача найт соотношение между исходной силой и силой зажима (без учета трения в направляющих плунжера).
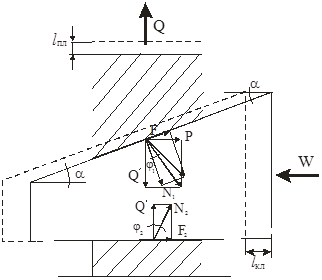
Рисунок 5.14 – Расчетная схема клина
 ,
,
где – Р – сопротивление перемещению клина со стороны плунжера 
F – сила трения в паре «клин - опора»

Тогда

Определение величины перемещения клина lкл выполняется по длине хода плунжера lпл из прямоугольного треугольника с катетами lпл и lкл.
Так как  , то
, то 
Расчет исходного усилия при учете потерь на трение в плунжере выполняется по расчетной схеме (Рис. 5.15)
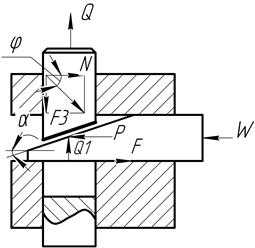
Рисунок 5.15 – Расчетная схема для клинового механизма
При этом исходим из того, что 
Из рассмотренной ранее схемы на рисунке 5.14 определим

тогда
откуда
 ,
,
где  – Угол трения между плунжером и опорной поверхностью
– Угол трения между плунжером и опорной поверхностью
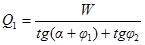
Рассмотрим клин двустороннего действия (Рис.5.16). В этом случае исходное усилие W распределяется на два плунжера, и силы зажима Q будет определяться в зависимости от углов α.
 ,
,
где α 1 и α 2 – углы наклона рабочих поверхностей; φ 1 и φ 2 – углы трения на этих поверхностях.
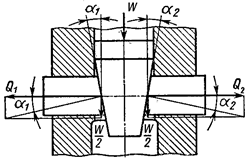
Рисунок 5.16 – Клин двустороннего действия
Если клин сделать с одним углом, обеспечивающем условия самоторможения(αр), то для перемещения плунжера на величину подвода плунжера (hП) он должен переместиться на величину (lП). При этом ход клина будет значительным, что приводит к увеличенным габаритам приспособления и потерям времени при зажиме заготовки. Для устранения этого недостатка клин делают с двумя углами подъема (Рис.5.17). На участке подвода плунжера к заготовке (hп) угол определяется условиями работы механизма без заклинивания (αп), тогда ход клина (lП) будет меньше. На рабочем участке параметры клина остаются неизменными, обеспечивающими условия самоторможения (αр).
Комбинированный клин позволяет уменьшить длину хода lп и, соответственно, времяна подвод плунжера.
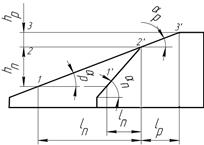
Рисунок 5.17 – Расчетная схема комбинированного клина
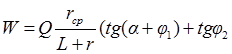
Торцовый кулачок является разновидностью клинового механизма (Рис.5.18.), у которого плоский односкосый клин расположен на цилиндре радиуса rср.
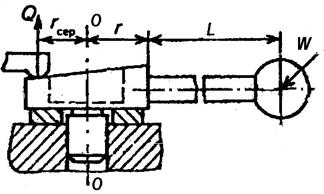
Рисунок 5.18 – Торцевой кулачок
Для создания силы зажима Q кулачок должен вращаться вокруг оси 00 силой W, приложенной на рукоятке длиной L. Силу W можно определить по формуле