 2015-05-06
2015-05-06 681
681Фильтрация сейсмических сигналов
1. Фильтры и их классификация
В широком смысле под фильтром понимается система, при прохождении через которую входной сигнал  преобразуется в выходной сигнал
преобразуется в выходной сигнал  .
.
Фильтрация – совокупность процедур разделения регулярных волн на основе различия их динамических (как правило – частотных) и кинематических (как правило – скоростных) характеристик.
Характеристики основных классов сейсмических волн в МОВ,
возникающих при возбуждении продольных колебаний
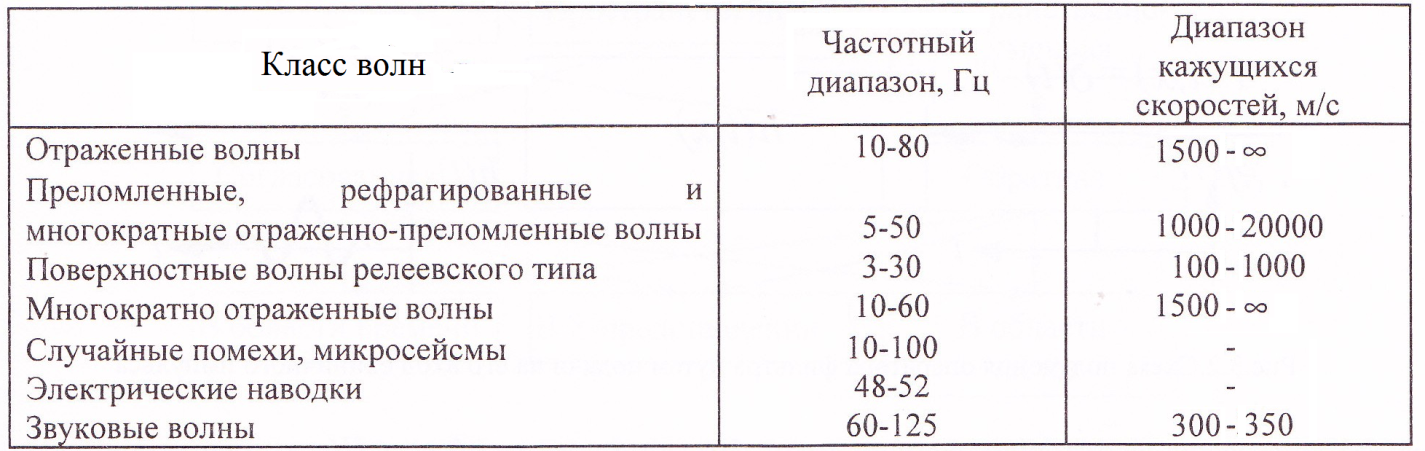
Полезными в МОВ являются однократно отраженные волны, в МПВ – преломленные (головные).
Целью применения фильтрации является повышение амплитудной или временной разрешенности записи.
Под амплитудной разрешенностью понимается превышение сигнала полезной волны над интерферирующей с ней помехой, численно амплитудная разрешенность выражается отношением «сигнал-помеха»: Асигн/Апом = S/N.
Под временнóй разрешенностью понимается возможность раздельного выделения двух следующих друг за другом сигналов
Удовлетворительное выделение полезного сигнала в зонах интерференции возможно при S/N ³ 2-3, хорошее – при S/N» 8-10. Очень часто подавление помех достигается за счет выделения в спектре сигнала области, где сигнал превалирует на помехой, т.е. за счёт сужения спектра сейсмической записи, что автоматически приводит к увеличению длительности сигналов и, соответственно, к снижению временнóй разрешенности. И наоборот – повышение временнóй разрешенности достигается за счёт сокращения длительности сигналов, что ведёт к расширению спектров и снижению амплитудной разрешенности.
Т.О. задачи повышения амплитудной и временнóй разрешенности сейсмической записи противоречивы и их решение достигается компромиссным путём. Этим объясняется существования большого числа разного вида фильтраций, решающих частные задачи.
Математическую модель одиночной сейсмической трассы можно представить как
P(t) = s(t) + n(t) (1)
где s(t) – сумма сигналов однократно отраженных волн s(t) =  (2)
(2)
Si (t) – форма импульса сигнала i - той отраженной волны,
Ai – амплитуда импульса i- того отражения,
Dti – время вступления сигнала i -того отражения.
n(t) – компонента, объединяющая сигналы всех остальных регистрируемых волн, исключая однократно
отраженные: n(t) = nкрат(t) + nпов (t) + nслуч (t) (3)
nкрат(t) – совокупность сигнал nслуч (t) ов многократно отраженных волн
nпов (t) – совокупность сигналов поверхностных волн-помех,
nслуч (t) – совокупность сигналов микросейсм и других случайных волн-помех.
Из равенства (1) следует, что целью фильтрации должно быть получение на выходе фильтра сигнала  :
:
| P(t) | ® | P(t)*h(t) | ® | 
|
здесь P(t) и и – входной и выходной сигналы,
* – операция свертки, описываемая интегралом Дюамеля,
h(t) – импульсная реакция фильтра (название данной функции связано с практическим способом её
определения: подав на вход фильтра d-импульс на выходе фильтра получим сигнал, тождест-
венный h(t))
Импульсная реакция фильтра h(t) однозначно описывает свойства фильтра во временной области. Однако часто свойства фильтров выгодно рассматривать в частотной (спектральной) области, где эти свойства описываются комплексной частотной характеристикой фильтра H(ω), которая связана с h(t) парой Фурье-преобразований:
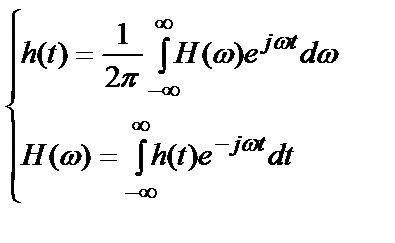 (4)
(4)
В частотной области сигналу P(t) соответствует комплексный спектр S(ω). Операция фильтрации в частотной области описывается равенством Sвых(ω) = Sвх(ω)·H(ω) (5)
Классификация основных видов фильтров
Ниже приводится упрощённая схема, в основу которой положена схема В.И. Бондарева (рис.3.3 изд. 2002 г., рис. 26.3 изд. 2007 г.)








