2015-05-06
2015-05-06 857
857Колебательным движением материальной системы называется такое ее движение, при котором она через некоторые промежутки времени постоянно возвращается к определенному положению.
Нетрудно обнаружить, что большинство окружающих нас систем совершают колебательное движение.
Если время, за которое все точки системы возвращаются к любому определенному положению с равными скоростями, постоянно и одинаково, то такое время Т называется периодом колебаний. А эти колебания – периодическим колебательным движением.
На рис.79 показан пример изменения какой-то обобщенной координаты q при довольно сложном колебательном процессе. А на рис.80 – при более организованных, периодических колебаниях.
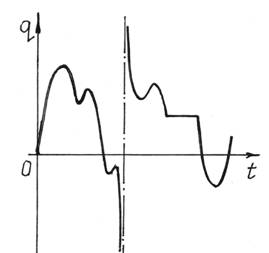
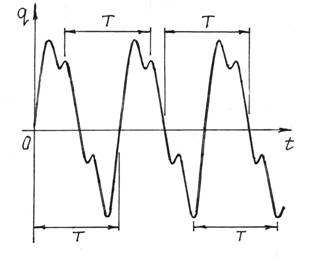
Рис.79 Рис.80
При периодическом процессе значения функции, описывающей движение системы, повторяются через каждый период Т, т.е.
 (1)
(1)
Если эта функция имеет вид
 (2)
(2)
то такое колебательное движение называется гармоническим. График такого движения дан на рис.81.
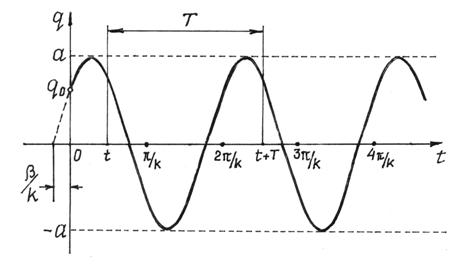
Рис.81
По (2)  – начальная координата, определяющая положение системы в начале движения;
– начальная координата, определяющая положение системы в начале движения;
 – амплитуда колебаний, имеет размерность обобщенной координаты;
– амплитуда колебаний, имеет размерность обобщенной координаты;
 – фаза колебаний,
– фаза колебаний,  – начальная фаза;
– начальная фаза;
k – частота колебаний, размерность ее с-1.
Период колебаний найдем используя свойство (1):

Отсюда, т.к. период синуса равен  ,
,  . Значит, период колебаний
. Значит, период колебаний
 (3)
(3)
Вообще, существует много всяких типов колебаний. Выделим, в первую очередь, линейные и нелинейные колебания. Названия их определяются видом дифференциальных уравнений, которые описывают колебательное движение материальной системы.
Исследование нелинейных колебаний значительно усложняется, т.к. нет общих методов решения нелинейных дифференциальных уравнений.
Но, если рассматривать малые колебания, такие, при которых координата и скорость изменяются на малую величину, то многие нелинейные уравнения станут линейными и исследование движения значительно упростится.
В дальнейшем мы будем рассматривать лишь малые, линейные колебания. И, мало того, колебания системы только с одной степенью свободы.
Естественно, колебания системы могут совершаться только около устойчивого положения равновесия.
Если система консервативная, то найти положение равновесия и определить устойчивость его можно с помощью потенциальной энергии.
Ранее было установлено, что в положении равновесия выполняется условие  и если в положении равновесия
и если в положении равновесия  то равновесие будет устойчиво.
то равновесие будет устойчиво.
Договоримся отсчитывать координату от положения равновесия  а потенциальную энергию там считать равной нулю
а потенциальную энергию там считать равной нулю  Тогда, по определению малых колебаний, обобщенная координата q всегда будет малой величиной.
Тогда, по определению малых колебаний, обобщенная координата q всегда будет малой величиной.
Разложим потенциальную энергию в ряд Маклорена около положения равновесия:
 .
.
Так как П(0) = 0 и  и, отбросив члены третьего и выше порядка малости, получим
и, отбросив члены третьего и выше порядка малости, получим  (4)
(4)
где коэффициент  по условию устойчивости.
по условию устойчивости.
Поэтому потенциальная энергия колебательной системы, отсчитываемая от положения устойчивого равновесия, будет всегда положительной.
Кинетическую энергию системы при малых колебаниях также можно преобразовать.
Кинетическая энергия системы  а так как радиус-вектор точек
а так как радиус-вектор точек  и
и  то
то 
Поэтому  где
где 
Эту функцию  можно разложить в ряд Маклорена по степеням q около положения равновесия и учесть только первый член:
можно разложить в ряд Маклорена по степеням q около положения равновесия и учесть только первый член:  . Остальные члены можно не учитывать, т.к. после подстановки в Т, они станут величинами третьего и выше порядка.
. Остальные члены можно не учитывать, т.к. после подстановки в Т, они станут величинами третьего и выше порядка.
Обозначив постоянную  получим
получим
 . (5)
. (5)
Коэффициент a называется коэффициентом инерции. Конечно,  т.к. кинетическая энергия не может быть отрицательной.
т.к. кинетическая энергия не может быть отрицательной.
Замечание. Практически, при исследовании конкретных колебательных систем приходится раскладывать в ряд функции, содержащие, чаще всего, 

 Разложение их с точностью до малых второго порядка известны:
Разложение их с точностью до малых второго порядка известны: