 2015-04-23
2015-04-23 1899
1899Известны тахогенераторы постоянного тока двух видов: с ограниченным и неограниченным углом поворота ротора.
Первый имеет неподвижную статорную обмотку, внутри которой помещен двух-, трех- или четырехполюсный постоянный
магнит, связанный с валом, скорость вращения которого контролируется. Величина э. д. с, наводимая в статорной обмотке, равна
 ,
,
где С — постоянный коэффициент, зависящий от геометрических размеров и обмоточных данных тахогенератора;
В — магнитная индукция в рабочем пространстве, зависящая от угла ф поворота ротора.
Приближенно зависимость В от  можно представить в виде
можно представить в виде
 ,
,
где Вт — максимальное значение магнитной индукции (при = 0).
Поскольку при повороте ротора от нулевого положения магнитная индукция может уменьшаться до нуля, подобные тахогенераторы применимы для контроля угловой скорости систем с ограниченным углом вращения вала, они могут быть использованы, например, в системе автопилота в качестве датчиков скоростной обратной связи, контролирующих угловую скорость вращения рулей.
Достоинством тахогенератора постоянного тока с ограниченным углом поворота является отсутствие коллектора и других трущихся контактов, что обуславливает высокую надежность и плавное изменение снимаемого напряжения.
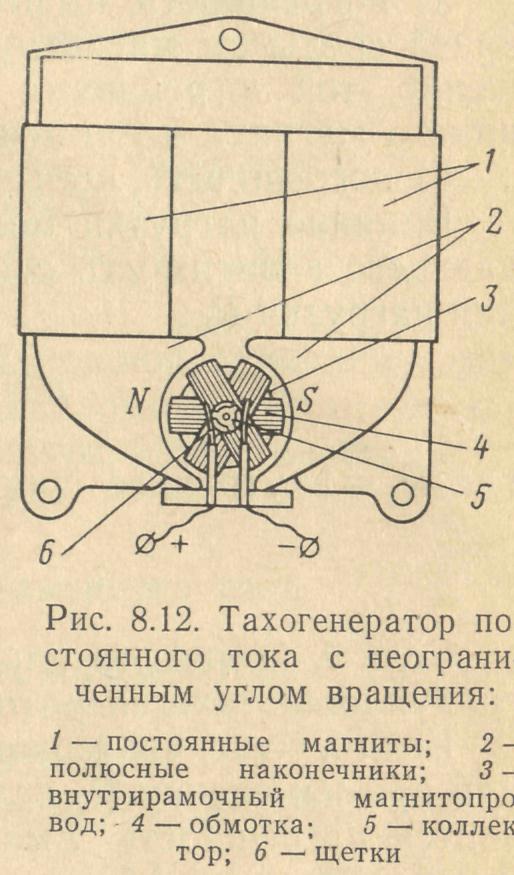
Второй вариант тахогенератора постоянного тока представляет собой коллекторную электрическую машину с неограниченным углом вращения (рис. 8.12).
Электродвижущая сила, развиваемая тахогенератором, так же как и в первом варианте, пропорциональна угловой скорости:
.
Магнитная индукция В при повороте ротора в пределах одной коллекторной ламели несколько изменяется (закон изменения В в пределах ламели можно изобразить «верхушкой» синусоиды), поэтому при непрерывном вращении ротора снимаемая э. д. с. пульсирует в некоторых пределах. Она содержит переменную составляющую, амплитуда которой уменьшается с увеличением числа ламелей на коллекторе.
Основным недостатком тахогенератора постоянного тока с неограниченным углом вращения является наличие коллектора и щеток. При длительной работе трущиеся контакты изнашиваются, и продукты износа попадают в изоляционный промежуток между ламелями. При этом возможны отказы двух видов:
а) вызванные нарушением контакта;
б) вызванные закорачиванием ламелей.
В перспективе представляется возможным усовершенствование тахогенераторов постоянного тока на основе бесколлекторных электрических машин постоянного тока.
Основные погрешности тахогенераторов постоянного тока:
а) погрешность, вызываемая влиянием температуры окружающей среды на магнитную индукцию в рабочем зазоре. Уменьшение этой погрешности достигается термостабилизацией постоянного магнита и применением термомагнитного шунта;
б) погрешность, вызываемая влиянием нагрузки.
Влияние нагрузки можно оценить с помощью выражения, дающего зависимость снимаемого напряжения и от сопротивления нагрузки RH:
 ,
,
где RВ – внутреннее сопротивление тахогенератора,
 .
.
Если  =const, то влияние нагрузки может быть учтено при градуировке тахогенератора.
=const, то влияние нагрузки может быть учтено при градуировке тахогенератора.
Если = var, что может иметь место при переменной нагрузке или при изменении RB вследствие изменения температуры, то появится погрешность. Уменьшение этой погрешности достигается уменьшением коэффициента , т. е. выбором
 ,
,
в) погрешность, вызванная влиянием сопротивления утечки. Эта погрешность присуща главным образом коллекторным машинкам, и ее устранение возможно путем перехода на бесколлекторные машины.
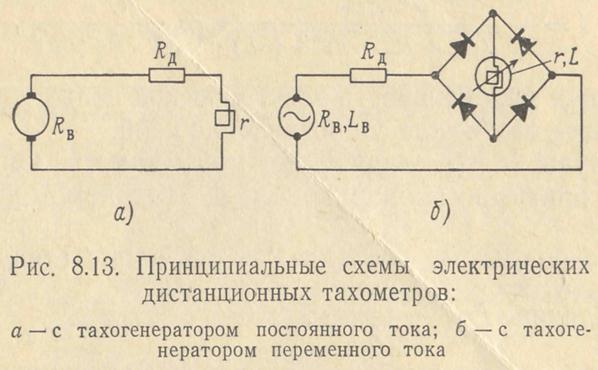
Электрический дистанционный тахометр постоянного тока может быть построен путем соединения тахогенератора постоянного тока с магнитоэлектрическим гальванометром (рис. 8.13, а), измеряющим силу тока
 ,
,
где RД – добавочное сопротивление,
r – сопротивление гальванометра.
Погрешности тахометра, построенного по схеме, приведенной на рис. 8.13, а, складываются из перечисленных выше погрешностей тахогенератора постоянного тока и дополнительных погрешностей, вносимых электрической цепью и гальванометром. Дополнительные погрешности подобны погрешностям других электрических дистанционных приборов с генераторными датчиками, например термоэлектрических термометров.
Для уменьшения погрешности, вызванной влиянием температуры на сопротивление г рамки гальванометра, применимы схемы температурной компенсации, рассмотренные на стр. 217 (см. рис. 7.15).

