 2015-04-23
2015-04-23 1361
1361Существуют две типовые схемы тахогенераторов переменного тока:
а) тахогенератор с переменной частотой;
б) тахогенератор с постоянной несущей частотой (с амплитудной модуляцией).
Тахогенератор с переменной частотой представляет собой бесколлекторную электрическую машину с вращающимся постоянным магнитом и неподвижной статорной обмоткой. Конструкция такого тахогенератора аналогична конструкции датчика магнитного тахометра, изображенного на рис. 8.9; обмотка статора может быть однофазной.
Мгновенное значение электродвижущей силы тахогенератора
 .
.
Из формулы (8.21) следует, что при использовании тахогенератора переменной частоты измерение угловой скорости возможно как путем измерения величины э. д. с. (амплитуды или эффективного значения), так и путем измерения частоты переменного тока.
Тахогенератор переменного тока имеет те же погрешности, что и тахогенератор постоянного тока, за исключением погрешностей, связанных с наличием коллектора.
Электрический дистанционный тахометр переменного тока может быть построен по одной из двух схем. По первой схеме тахогенератор соединяется с гальванометром переменного тока или с гальванометром постоянного тока через выпрямитель (см. рис. 8.13,6). При этом выходной величиной служит эффективное значение силы тока
 ,
,
где L — общая индуктивность электрической цепи;
R — общее омическое сопротивление цепи.
Из формулы (8.22) следует, что при малых со, когда  <<R, сила тока I примерно пропорциональна измеряемой угловой скорости.
<<R, сила тока I примерно пропорциональна измеряемой угловой скорости.
С увеличением  , когда L>R, сила тока I стремится к постоянной величине
, когда L>R, сила тока I стремится к постоянной величине
 .
.
Тахометру, построенному по данной схеме, присущи погрешности тахогенератора и дополнительные погрешности, вносимые измерительной схемой и гальванометром.
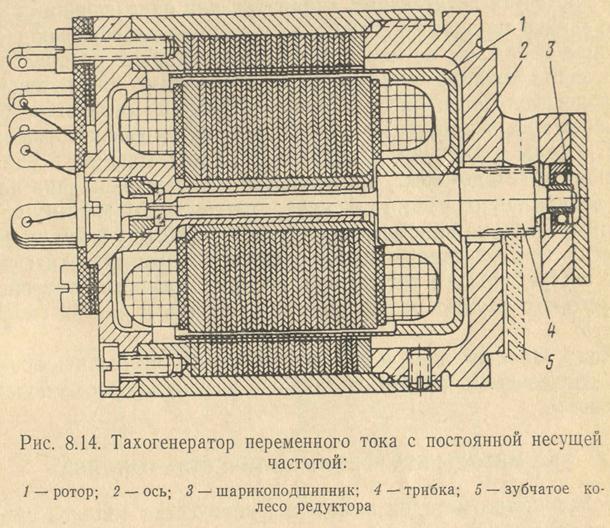
По второй схеме тахогенератор соединяется с устройством, измеряющим частоту переменного тока. Схема измерения частоты предпочтительнее, чем схема измерения напряжения, так как полностью исключаются погрешности тахогенератора, хотя остаются погрешности, вносимые измерителем частоты. Тахогенератор с постояннойнесущей частотой представляет собой электрическую индукционную машину с полым ротором, внутри или снаружи которого помещен статор с двумя взаимно перпендикулярными обмотками (рис. 8.14). Первичная обмотка питается переменным током постоянной амплитуды и постоянной частоты f (обычно f = 400 или 1000 гц). Со вторичной обмотки снимается э. д. с, мгновенное значение которой
 ,
,
где С — постоянный коэффициент, зависящий от геометрических размеров и обмоточных данных машины;
Ф1 — магнитный поток первичной обмотки;
ZK — комплексное сопротивление контура, по которому течет короткозамкнутый ток в теле ротора.
Выходной величиной тахогенератора служит амплитудное значение э. д. с.

или ее эффективное значение
 .
.
Основные погрешности тахогенератора с постоянной несущей частотой следующие:
а) погрешность от изменения магнитного потока Ф1 первичной обмотки; поток Ф1 может изменяться под влиянием изменения напряжения и частоты питания первичной обмотки, а также вследствие изменения температуры;
б) погрешность от изменения несущей частоты f (частота входит сомножителем в выражение Е2т),
в) погрешность от изменения комплексного сопротивления ротора, вызываемая влиянием температуры на удельное электрическое сопротивление материала, из которого изготовлен ротор;
г) погрешность от влияния нагрузки.
Уменьшение погрешностей (п. «а») и (п. «б») может быть достигнуто путем стабилизации напряжения и частоты питания первичной обмотки.
Для уменьшения погрешности (п. «в») ротор может быть изготовлен из материала с малым температурным коэффициентом, а электрического сопротивления, что приведет, однако, к снижению амплитуды выходного напряжения вследствие увеличения удельного электрического сопротивления.
Погрешность (п. «г») носит такой же характер, что и в рассмотренных выше схемах тахогенераторов других типов, и для ее уменьшения следует увеличивать соотношение между сопротивлениями нагрузки и внутренним сопротивлением вторичной обмотки тахогенератора.
Вследствие больших погрешностей тахогенератор с постоянной несущей частотой применяется главным образом в следящих системах в качестве датчика скоростной обратной связи.

