 2015-04-30
2015-04-30 411
411
КАЧЕСТВО УПРАВЛЕНИЯ: УСТОЙЧИВОСТЬ, ОШИБКИ, СТАТИЧЕСКИЕ И АСТАТИЧЕСКИЕ СИСТЕМЫ.
Все понятия, перечисленные в заголовке этого параграфа описывают, в сущности, то, как протекает переходный процесс в системе и чем он заканчивается.
При проектировании систем с обратной связью ключевой проблемой является обеспечение устойчивости системы. Устойчивость – это необходимое, хотя и не достаточное условие нормальной работы системы.
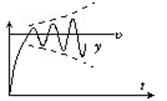
На (рис.1) показана реакция (выходной сигнал у) неустойчивой системы на ограниченное ступенчатое воздействие в виде единичной функции
(a) (б)
(в)
Выходной сигнал, как видно из рисунка, либо неограниченно монотонно нарастает, либо совершает незатухающие колебания.
Причиной такой неадекватной реакции системы на ограниченное задающее воздействие может быть, например, инерционность и запаздывания, присущие звеньям системы и ее связям, а также недостаток информации, используемой при управлении.
Действительно, для точной остановки, например, тяжелого автомобиля мало знать рассогласование (расстояние до места остановки) нужно еще знать скорость и, может быть, ускорение движения. В этом случае можно, введя в систему дополнительный блок, оценивающий эти параметры движения, уменьшить ошибку выполнения команды. Так поступает опытный водитель, заранее нажимающий на тормоза и поворачивающий руль, чтобы предупредить возможность переезда через заданную точку остановки или уклонение от намеченного курса движения.
Итак, в первом приближении, устойчивая система – это динамическая система, обладающая ограниченной реакцией на ограниченный входной сигнал. [13]
Рис. 2
Рис. 3
На рис. 2, 3 показаны выходные сигналы  в устойчивых системах. Предполагается, что система работает в следящем режиме и
в устойчивых системах. Предполагается, что система работает в следящем режиме и  является ошибкой системы, ошибкой рассогласования.
является ошибкой системы, ошибкой рассогласования.
Системы, соответствующие рис.2, это статические системы, у которых в установившемся режиме ошибка  может быть очень небольшой, но не равной нулю:
может быть очень небольшой, но не равной нулю:  .
.
На рис. 4 приведен пример такой системы:
Рис. 4
Из последнего соотношения видно, что даже при очень больших k  . Дело в том, что в такой системе существует пропорциональность между ошибкой и выходной величиной:
. Дело в том, что в такой системе существует пропорциональность между ошибкой и выходной величиной:  ; если
; если  , то и
, то и  .
.








