 2015-05-14
2015-05-14 2974
2974Оптимизация – это целенаправленная деятельность, заключающаяся в получении наилучших результатов при соответствующих условиях.
Обычно оптимизируемая величина связана с экономичностью работы рассматриваемого объекта. В общем случае объектом может считаться любой производственный комплекс: аппарат, агрегат, цех, завод, комбинат, отрасль промышленности. Оптимальный, или наилучший, вариант работы объекта должен измеряться количественной мерой – критерием оптимальности.
Критерий оптимальности – количественная оценка оптимизируемого качества. Это главный признак, по которому судят о том, насколько хорошо функционирует данная система, работает данный процесс, насколько хорошо решена задача оптимизации.
На основании выбранного критерия оптимальности составляется так называемая целевая функция F(x), представляющая собою зависимость критерия оптимальности от параметров, влияющих на его значение. Вид критерия оптимальности (или целевой функции) определяется конкретным содержанием решаемой задачи оптимизации.
Формулировка задачи оптимизации может быть различной в зависимости от преследуемой цели, в общей постановке оназаключается в определении значений управляющих параметров, оптимизирующих принятый показатель качества – критерий оптимальности, который имеет максимально или минимально возможную величину, при условии, что выполняются ограничения на переменные, накладываемые технологическими, эксплуатационными, конструктивными требованиями, условиями устойчивости, пропускной способности, наличия сырья и т. п.
Различают:
1) задачи статической оптимизации для процессов, протекающих в установившихся режимах, которые решают вопросы создания и реализации оптимальной модели процесса;
2) задачи динамической оптимизации, или задачи создания и реализации системы оптимального управления процессом при неустановившихся режимах эксплуатации, для решения которых требуется изучение динамики процесса (например, пуск процесса или перевод его с одного режима в другой при минимальных отклонениях качества продукции, оптимальное управление периодическим процессом).
Для решения задач оптимизации необходимо:
1. Составить математическую модель объекта оптимизации;
2. Выбрать критерий оптимальности и сформировать функцию цели (целевая функция может быть как без ограничений, так и с ограничениями на значения отдельных параметров);
3. Определить управляющие параметры и их возможные ограничения;
4. Выбрать и реализовать метод оптимизации, который позволит найти экстремальные значения искомых величин.
Процедура решения задачи оптимизации процессов включает установление (или выбор) управляющих параметров (факторов) и их количества, возможность изменения которых позволяет управлять и оптимизировать процесс (это может быть температура, давление, время, состав исходной смеси и др.).
Остальные параметры при этом не регулируются, хотя их значения, учитывают при определении оптимальных условий.
Как только определены управляющие параметры, в большинстве задач оптимизации устанавливают ограничения на область изменения этих параметров (переменных).
Ограничения – технологические величины, которые в процессе работы агрегата (аппарата) не должны выходить из предписываемых технологией допусков.
Выделяют ограничения типа равенств и типа неравенств. Ограничения типа равенств устанавливают определенное значение того или иного параметра
hi=ai
Параметр hi можно рассматривать как один из контролируемых нерегулируемых входов (состав сырья, размеры аппаратов и т. д.)
Ограничения типа неравенств определяют пределы, в которых допустимо изменение параметров X процесса

Все методы решения оптимальных задач подразделяются на следующие основные группы.
1. Аналитические методы. Их применяют, когда мы можем продифференцировать целевую функцию и найти ее экстремум.
2. Методы математического программирования (линейного, динамического, нелинейного). Для их применения нужно, чтобы целевая функция была вычислимой: должен быть известен алгоритм, по которому можно рассчитать значение критерия оптимальности при заданных значениях факторов.
3. Методы случайного поиска (экспериментальная оптимизация), применяемые, если вид целевой функции неизвестен. Тогда проводят планирование и реализацию эксперимента таким образом, чтобы в результате достичь района оптимума.
Известны также комбинированные методы, сочетающие некоторые достоинства отдельных методов из различных групп.
Поиск оптимума численными методами. Суть численных методов: вычисляется ряд значений F при различных значениях аргументов; сопоставление этих значений показывает, в каком направлении нужно двигаться в пространстве факторов, чтобы приближаться к оптимуму.
1. Оптимизация перебором применяется, если число возможных вариантов конечно. Рассчитывают целевую функцию для всех возможных вариантов и выбирают наибольшее (или наименьшее) значение.
2. Сканирование – метод, близкий к перебору, но применяемый к непрерывным функциям.
Рассмотрим для примера одномерное сканирование – случай, когда ищем максимум целевой функции от одного фактора (поиск минимума осуществляется точно так же).
Зададим пределы изменения фактора х от а до b. Здесь а и b – ограничения, которые можно установить в любой реальной задаче.
Данный интервал [а, b], на котором производится поиск экстремума целевой функции называется интервал неопределенности. Задача поиска экстремума сводится к сужению интервала неопределенности. Методом сканирования она решается следующим образом (рисунок 1):
Выберем целое число q – количество значений целевой функции, которое придется рассчитывать. Рассчитаем интервал Δх

Отложим от точки а до точки b интервалы Δх (рисунок 1). Границы каждого интервала назовем узлами; на рисунке 1 каждый узел – обозначен крестиком.
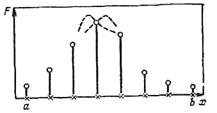
а, b – границы интервала неопределенности.
Рисунок 1 – График исследования функции сканированием:
В каждом узле расссчитаем F(х) (см. точки на рис. 1). Теперь принимают за максимум наибольшее из полученных значений – на рисунке это 4–я точка слева. К концу расчета интервал неопределенности δ составит 2 Δх: истинный максимум может лежать либо справа, либо слева от полученной наилучшей точки (пунктиры на рис.1).
Формула определяет эффективность метода

Методы направленного поиска. Методы направленного поиска более эффективны, но не обладают той универсальностью, которой отличается сканирование. Их эффективность связана с тем, что продвижение в факторном пространстве происходит в сторону искомого экстремума. Но направленность поиска имеет следующее основное требование – условие унимодальности функции, т.е. функция, должна иметь в допустимой области только один экстремум нужного знака (один максимум, если ищем максимум, один минимум в противоположном случае).
При выборе метода поиска экстремума различают два основных случая: 1) F зависит только от одного фактора, F=F(x): тогда говорят об одномерном поиске; 2) факторов больше одного – многомерный поиск. Рассмотрим метод одномерного поиска (метод дихотомий) и три – многомерного – покоординатный спуск, градиентный метод, метод случайного поиска.
Дихотомия. Как и при описании сканирования, рассмотрим поиск максимума на отрезке [а, b], показанном на рисунке 2.
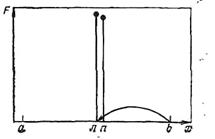 |
Рисунок 2 – График поиска максимума методом дихотомий.
Разделим отрезок пополам – точка л(левая) на рисунке. Рассчитаем значение F=F(л) в этой точке. Выберем малое приращение фактора, равное ε, и поставим на отрезке правую точку n =л+ ε. Рассчитаем F(n). Поскольку F(л)>F(n), как изображено на рисунке 2, можно утверждать, что, если F(x) унимодальна, то максимум находится в левой половине отрезка.
Отбросим правую половину отрезка (на ней максимума нет). Для этого правый конец – точку b – перенесем в точку л. Точку л обозначим через b. На рисунке 2 этот перенос обозначен стрелкой. (Разумеется, если бы было F(л)<F(n), то точку л мы перенесли бы точку а).
После того, как правый конец отрезка перенесен, задача вернулась к исходным условиям: задан отрезок от а до b, на котором нужно найти максимум. Поэтому проводится следующий цикл расчета, ничем не отличающийся от предыдущего, кроме значения b. Такой алгоритм (расчет слагается из одинаковых циклов, различающихся лишь начальными условиями) называют итерационным. Останавливают итерации, когда интервал неопределенности окажется меньше ε:

Эффективность алгоритма дихотомии определяется так: каждая пара расчетов (точки л и n) уменьшает отрезок [а, b] вдвое. Обозначим исходный отрезок индексом исх. Если сделать q расчетов (q – четное), то

Покоординатный спуск. Выбираются координаты начальной точки поиска х1н и х2н, единичные приращения обоих факторов (шаги) H1 и H2, а также малые приращения факторов ε1 и ε2.
Рассчитывается значение F (х1н, х2н) в точке 1 (рисунок 3). Далее, не меняя величины х2, начинаем двигаться вдоль оси x1, давая на каждом шаге этому фактору приращение H1 (или – H1, в зависимости от того, при движении в какую сторону будет наблюдаться рост F). На каждом шаге – в точках 2, 3, 4 и т.д. – проводится расчет F. Шаги продолжаются до тех пор, пока продолжается рост F. Неудачными будем считать те шаги, на которых получено меньшее значение F, чем на предыдущих; на рисунке они обозначены крестиками. После первого неудачного шага (точка 6 ) возвращаемся в предыдущую точку (в данном случае – в точку 5), фиксируем величину x1 и начинаем изменять х2, давая ему приращения Н2 или – H 2 (точки 7, 8, 9, 10).
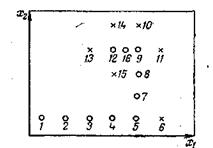
о – удачные шаги; х – неудачные шаги.
Рисунок 3. График движения в пространстве факторов при оптимизации
методом покоординатного спуска
Затем снова движемся вдоль оси x1 (точки 11, 12, 13), снова меняем направление (точки 14, 15) и т. д. На рисунке 3 изображена ситуация, когда из точки 12 двигаться некуда: во всех окружающих точках (9, 13, 14, 15) значение F меньше, чем в данной. Это значит, что мы уже приблизились к максимуму и прежние крупные шаги из точки 12 переносят нас через него. Поэтому уменьшаем шаги (например, вдвое – см. точку 16) и продолжаем поиск уменьшенными шагами. Уменьшение шага может производиться неоднократно. Но в тот момент, когда уменьшенные шаги оказываются меньше, чем соответственно ε1 и ε2, считают, что максимум зафиксирован достаточно точно и можно закончить расчет, приняв лучшую точку за оптимум.
Метод градиента существует в большом числе вариантов. Рассмотрим один из простейших.
Выберем координаты исходной точки х1н и х2н, шаги H1 и H 2 и малые приращения ε1 и ε2. Движение к оптимуму начнем не вдоль какой-либо оси координат, а в направлении градиента целевой функции (или, если ищем минимум, то в противоположном градиенту направлении). Поскольку H1 и H 2 приняты за единичные приращения координат, формула градиента получит вид:
Для расчета направления градиента необходимо знать частные производные целевой функции по факторам. Для расчета производных проводится вспомогательная серия расчетов (рисунок 4).
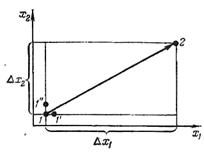 |
1 – исходная точка, 1' и 1 " – вспомогательные точки.
Рнсунок 4 – Графическая схема расчетов по методу градиента
Около начальной точки 1 ставятся две вспомогательные точки: 1' на расстоянии ε1 вдоль оси x1 и 1 " на расстоянии ε2 вдоль оси x2 и в них рассчитывается F. Производные находят по формулам:
После этого делают шаг в точку 2 для следующего расчета F. Ее координаты находятся по формуле
причем

Здесь i – номер точки; j – номер фактора.
Если шаг оказался удачным, т. е. если Fi+1>Fi (при поиске максимума), то делают следующий шаг в том же направлении. Если и этот шаг удачен, шагнем еще раз и т. д.
Если шаг неудачен, очевидно, поверхность настолько искривлена, что, мы «перескочили» через ту окрестность предыдущей точки, в которой функция возрастала. Поэтому в таком случае обычно уменьшают шаг, например, вдвое. Теперь, если уменьшенный шаг в том же направлении будет удачен, нет смысла делать еще шаг, поскольку он приведет в «плохую» точку (см. рис. 5, а: крестик – неудачный шаг, (i +2)–точка половинного шага).
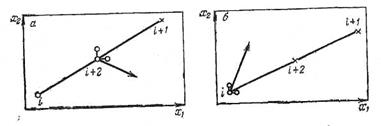 |
а – уменьшенный шаг удачен; б – уменьшенный шаг неудачен; Х– неудачный шаг; стрелка – новое направление градиента.
Рисунок 5 – Графическая схема расчетов после совершения неудачного шага
В этом случае около точки (i +2) поставим вспомогательные точки для расчета производных, найдем новое направление градиента и двинемся по нему (на рисунке 5 вспомогательные точки – кружки, новое направление градиента – стрелка). Если же и уменьшенный шаг не приведет в «хорошую» точку (рисунок 5, б), то вернемся в точку i и будем в ней искать направление градиента.
Движение продолжим до тех пор, пока шаги не станут очень малыми. Завершают вычисления, если оба приращения Δхij окажутся меньше, чем соответствующие малые величины εj.
Случайный поиск. В случайном поиске шаг из исходной точки осуществляется в случайном направлении. Пользуясь формулой определяют Δхij

где аij – случайное число, которое обычно либо находят по таблицам случайных чисел, имеющимся в большинстве книг и справочников по теории вероятностей, математической статистике и теории эксперимента, либо (чаще) рассчитывают на ЭВМ (датчики случайных чисел).
Если шаг оказался удачным, обычно продолжают движение в том же направлении; если неудачным – рассчитывают новое случайное направление.
 |
0 – исходная точка; 1 – случайная точка
Рисунок 6 – График определения случайного направления
Задача. Задана целевая функция:
1. F(x)=-12∙x+2∙x2
найти значение x при котором F(x) будет минимальна. Поиск оптимума осуществить с использованием численных методов оптимизации: сканирования и дихотомии. Принять величину интервала неопределенности [а, b] равной [0,10], а значение ε=0,2;
2. F(x)=x1∙x2+x12+2∙x22
найти значения переменных x1 и x2 при которых F(x) будет минимальна. Поиск оптимума осуществить с использованием численных методов оптимизации: градиентного метода, поокоординатного спуска, случайного поиска. Начальные координаты поиска x10=2 и x20=2, значение ε1=0,2, ε2=0,2.








