 2015-05-14
2015-05-14 1920
1920Лабораторная работа №12
ИССЛЕДОВАНИЕ ПОТЕНЦИОМЕТРИЧЕСКОЙ СЛЕДЯЩЕЙ СИСТЕМЫ
Цель работы: 1. Ознакомиться с устройством и принципом действия потенциометрической следящей системы.
2.Снятие статической характеристики потенциометрической следящей системы при различных сопротивлениях нагрузки.
3. Изучение схем следящих систем с релейным управлением.
Общие сведения
Следящей системой называется такая автоматическая система, которая на выходе (на объекте управления) воспроизводит задаваемую ей величину на входе, произвольно изменяющуюся во времени.
Следящие системы представляют по существу автоматические регуляторы положения, в которых регулируемой величиной является линейное или угловое перемещение. Наиболее распространены следящие системы с угловым перемещением, в которых задающей величиной является угол поворота задающей оси, а регулируемой величиной – угол поворота выходной оси, т.е. выходная ось как бы “следит” за положением задающей оси. Отсюда происходит название этих систем.
Обязательной составной частью любой следящей системы должно быть устройство, преобразующее угол рассогласования между положением задающей оси в электрическое напряжение. Для этой цели используются различные измерительные преобразователи, в частности, потенциометрические и сельсинные.
Схема следящей системы с использованием потенциометрических измерительных преобразователей угловых перемещений приведена на рис.1. Принцип действия такой системы заключается в следующем. Поворотом оси задающего потенциометра задаётся любой закон изменения угла поворота во времени  . Тот же самый закон угла поворота во времени должен быть автоматически воспроизведён на выходе системы
. Тот же самый закон угла поворота во времени должен быть автоматически воспроизведён на выходе системы  , т.е. на управляемом объекте. Для этого напряжение UX, пропорциональное углу поворота, передаётся по цепи обратной связи на вход системы, где оно вычитается из напряжения пропорционального задаваемому углу
, т.е. на управляемом объекте. Для этого напряжение UX, пропорциональное углу поворота, передаётся по цепи обратной связи на вход системы, где оно вычитается из напряжения пропорционального задаваемому углу  .
.
Напряжение рассогласования  , усиленное усилителем воздействует на исполнительный двигатель, который через редуктор связан с осью потенциометра обратной связи и управляемым объектом. Если ось задающего потенциометра повернётся на некоторый угол , то появится угол рассогласования
, усиленное усилителем воздействует на исполнительный двигатель, который через редуктор связан с осью потенциометра обратной связи и управляемым объектом. Если ось задающего потенциометра повернётся на некоторый угол , то появится угол рассогласования  , а следовательно и напряжение рассогласования U. При этом исполнительный двигатель будет поворачивать ось потенциометра обратной связи до тех пор, пока не станет равным
, а следовательно и напряжение рассогласования U. При этом исполнительный двигатель будет поворачивать ось потенциометра обратной связи до тех пор, пока не станет равным  . В случае, если
. В случае, если  , напряжение рассогласования
, напряжение рассогласования  и исполнительный двигатель остановится. Таким образом, следящая система всё время автоматически работает на уничтожение рассогласования.
и исполнительный двигатель остановится. Таким образом, следящая система всё время автоматически работает на уничтожение рассогласования.
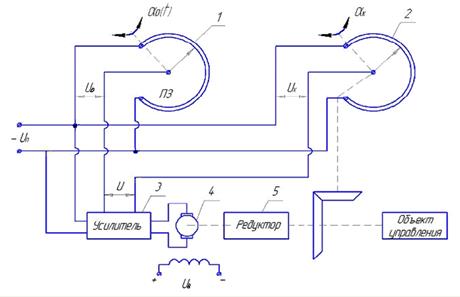
Рис.1. Схема следящей системы с потенциометрическими измерительными преобразователями
(1 – задающий потенциометр; 2 – потенциометр обратной связи; 3 – усилитель; 4 – двигатель;
5 – редуктор).
Величина напряжения рассогласования зависит не только от угла рассогласования, но также и от сопротивления нагрузки и от соотношения между величинами сопротивлений нагрузки и потенциометрических измерительных преобразователей. Функции нагрузки обычно выполняют входное сопротивление усилителя или реле.
Если величина сопротивления нагрузки  значительно больше, чем величины сопротивлений потенциометрических измерительных преобразователей, то потенциометры работают в режиме холостого хода и напряжение рассогласования зависит только от угла рассогласования, т.е.
значительно больше, чем величины сопротивлений потенциометрических измерительных преобразователей, то потенциометры работают в режиме холостого хода и напряжение рассогласования зависит только от угла рассогласования, т.е.  .
.
Чувствительность системы при холостом ходе определяется отношением величины напряжения рассогласования к величине угла рассогласования, т.е.  .
.
Чувствительность системы при наличии нагрузки равна:
 , где:
, где:  ;
;  ;
;  .
.
В тех случаях, когда к следящей системе не предъявляется особо высоких требований по точности и плавности действия, усилитель с линейной характеристикой может быть заменён релейным устройством. Пример следящей системы с релейным управлением показан на рис.2. Между движками потенциометров включена обмотка поляризованного реле, которое своими контактами переключает цепь питания исполнительного двигателя, меняя направление его вращения.
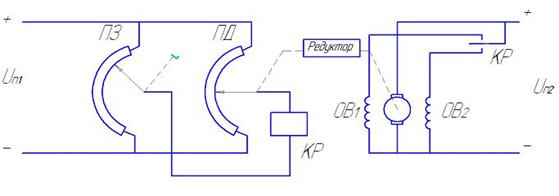
Рис.2. Следящая система с релейным управлением
Следящие системы с релейным управлением разделяются на системы без зоны нечувствительности и системы с зоной нечувствительности.
На рис.3. показаны характеристики этих систем.
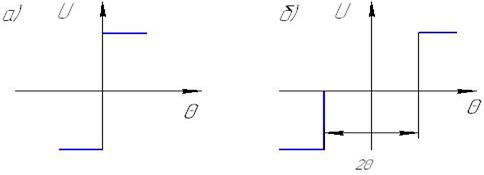
Рис.3. Характеристики релейных систем:
а – без зоны нечувствительности; б – с зоной нечувствительности.
Зона нечувствительности определяется, в данном случае, величиной изменения угла рассогласования до тех пор, пока поляризованное реле не сработает и не изменит направление вращения исполнительного двигателя. Момент срабатывания реле определяется силами трения и зазорами, наличием переменных переходных сопротивлений в электрических контактах, сопротивлением нагрузки.
Если реле является двухпозиционным и срабатывает как в одну, так и в другую сторону при ничтожных рассогласованиях, то система относится к первому типу т.е. без зоны нечувствительности. Если реле является трехпозиционным и для срабатывания в одно из крайних положений требует заметного рассогласования, то система относится ко второму типу (с зоной нечувствительности).
В системах без зоны нечувствительности неизбежны автоколебания, так как двигатель никогда не бывает отключен от источника тока и непрерывно реверсируется. В системах с зоной нечувствительности автоколебаний может и не быть, если зона нечувствительности достаточно широка, а, следовательно, достаточно велика неточность работы системы. Таким образом, в релейных следящих системах приходится либо допускать автоколебания, либо жертвовать точностью и устранять автоколебания за счет введения зоны нечувствительности достаточной ширины.
Следящие системы находят широкое применение при автоматизации технологических процессов строительной индустрии, в системах водоснабжения и канализации, в гидромелиоративных системах для передачи на расстояние результатов измерений виде угла поворота или перемещений, для изменения угла рассогласования между двумя механически не связанными валами, для дистанционного управления самыми разнообразными механизмами.








