2015-05-20
2015-05-20 524
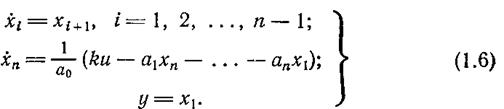
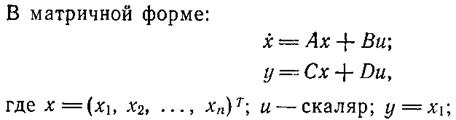
524Известны следующие формы математического описания непрерывных систем: дифференциальными уравнениями, переходными функциями, интегральными и спектральными преобразованиями, а также две формы описания дискретных систем: разностными уравнениями и Z-преобразованием.
Линеаризация уравнений движения.
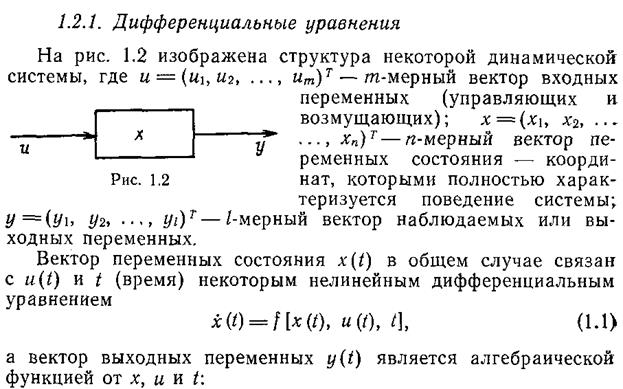
Работу любой автоматической системы в установившемся и переходном режиме можно описать, использовав дифференциальные уравнения, которые применимы для описания многих явлений природы и, в частности, процессов преобразования и передачи массы или энергии
У реальных элементов и систем связь между входными и выходными величинами, как правило, нелинейная, общее уравнение системы оказывается нелинейным, а аналитическое решение нелинейных уравнений возможно только в редких частных случаях. Поэтому полученные нелинейные уравнения элементов системы необходимо линеаризовать.
Линеаризация уравнений — это замена точного нелинейного уравнения приближенным линейным. Например, алгебраическое нелинейное уравнение

можно заменить приближенным линейным уравнением

Отметим, что уравнение (17) записано в отклонениях, а не в абсолютных значениях переменных величин.
Основным допущением, на котором базируется линеаризация, является предположение, что независимая переменная изменяется в небольших пределах. Оценим аналитически, какими же должны быть эти пределы. Функцию у в уравнении типа (16) можно разложить в ряд Маклорена в окрестностях точки 
 Так как величина
Так как величина  малая, то все слагаемые в формуле (18), кроме первого и второго, будут иметь высшие порядки малости, и ими можно пренебречь. Поскольку величина
малая, то все слагаемые в формуле (18), кроме первого и второго, будут иметь высшие порядки малости, и ими можно пренебречь. Поскольку величина  постоянная, то в результате получим линейное уравнение
постоянная, то в результате получим линейное уравнение 
где Д0 = у — у0.
Уравнение (19) является приближенным по отношению к уравнению (18), так как мы пренебрегли слагаемыми высших порядков малости. При этом чем меньше отклонение переменных от их установившихся значений, тем меньше ошибка при замене нелинейного уравнения линейным.
Действительно, из рис. 55 и уравнения (19) следует, что линеаризация уравнения (16) соответствует замене точной кривой у = х2 прямой, касательной в точке линеаризации А,
В тех случаях, когда функция зависит от нескольких переменных, в качестве коэффициентов линейного уравнения будут стоять не простые, а частные производные.