 2015-05-20
2015-05-20 2549
2549Цель:ознакомиться энергетикой электропривода при регулировании режимов работы ЦН.
Применяя регулируемый привод, можно напрямую плавно управлять скоростью вращения рабочего колеса ЦН и тем самым обеспечить требуемые значения расхода и подачи без использования дросселирующей арматуры. Последняя устанавливается только для вспомогательных целей и в процессе перекачки полностью открыта, что снижает гидравлическое сопротивление сети.
При регулировании подачи изменением частоты вращения колеса насоса и полностью открытой задвижке на выходе (Z* =1)уравнения (1.7), (1.8) и (1.9) примут вид:
 ; (1.19)
; (1.19)
 ; (1.20)
; (1.20)
 . (1.21)
. (1.21)
В этом случае снижение подачи происходит за счет уменьшения напора, создаваемого насосом (см. рисунок 1.14), при этом исключаются дополнительные потери мощности в гидрорегуляторе и при любом значении подачи РЦН = РТР.
. 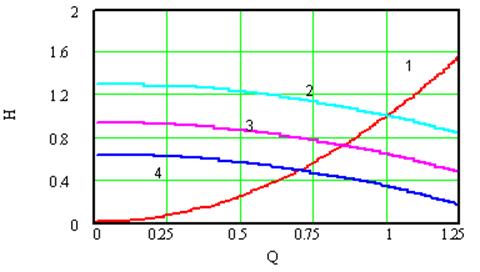
1 – Характеристика магистрали;
2, 3, 4 – характеристики ЦН при регулировании ώ.
Рисунок 1.14 - Регулирование подачи ЦН изменением частоты вращения рабочего колеса
При расчетах эффективности внедрения регулируемых электроприводов, часто учитывается только указанный эффект. Еще одним фактором снижения энергопотребления ЦН при регулировании производительности изменением частоты вращения рабочего колеса насоса является следующее. Паспортное значение КПД ЦН (см.рисунок 1.5) получено при постоянной и равной номинальной частоте вращения. Любой способ снижения подачи при ω= const приводит к снижению ηЦН. На рисунке 1.15 представлены значения КПД ЦН при пониженных частотах вращения,полученные с использованием формул гидравлического подобия (1.10).
Рисунок 1.15 – КПД ЦН при различной частоте вращения рабочего колеса
Максимум КПД со снижением ω смещается влево и незначительно снижается. Из рисунка очевидно, что для снижения подачи рационально работать на пониженных скоростях. При подаче Q* = 0.4 КПД ЦН при ω= const составляет 0.65 (точка b), при частотном регулировании возрастает до 0.8 (точка а). Таким образом,снижение частоты вращения в соответствии с заданной производительностью позволяет не только исключить гидравлические потери в гидрорегуляторе, но и повысить энергоэффективность за счет повышения КПД самого насоса.
Авторами [1,7] отмечалось это обстоятельство, однако для сетей с противодавлением предлагались достаточно сложные методы оценки изменения КПД ЦН при регулировании частоты вращения.Поскольку потери в ЦН составляют существенную долю общих потерь агрегата, важно получить инструмент их аналитической оценки при планировании и проектировании модернизации насосных агрегатов.
Кривая КПД, рассмотренная ранее, представляет собой характеристику потерь в ЦН при постоянной частоте вращения и регулировании подачи каким - либо другим способом. При отсутствии противодавления, в соответствии с формулами подобия, значение КПД ЦН при регулировании производительности скоростью рабочего колеса, остается постоянным. Для расчета КПД при НС ≠ 0 используем полученные ранее соотношения.
При регулировании частоты вращения рабочего колеса ЦН точки установившегося режима работы расположены на характеристике трубопровода и полезная мощность равна в соответствии с (1.2), (1.3),
 . (1.22)
. (1.22)
Для обеспечения подачи Q вал вращается с частотой
и механическая мощность на валу, по закону гидравлического подобия равна
 . (1.23)
. (1.23)
Относительное значение КПД при регулировании подачи можно определить, как 
 . (1.24)
. (1.24)
На рисунке 1.16 представлены расчеты мощностей и КПД ЦН при работе насоса на сеть без статического напора и с противодавлением, рассчитанные по выражениям(1.22), (1.23), (1.24). При НС = 0, η* = 1 во всем диапазоне регулирования подачи, при наличии противодавления КПД изменяется в соответствии с выражением (1.24).
 |  |
1 – характеристика трубопровода; 2 – полезная гидравлическая мощность;
3 – механическая мощность на валу ЦН, 4 –относительный КПД ЦН.
Рисунок 1.16
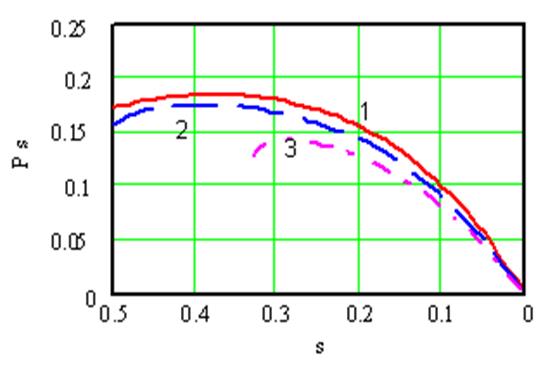
На рисунке 1.17 приведены расчетные кривые КПД регулируемого по частоте вращения ЦН для различных значений статического напора и экспериментально полученная характеристика КПД. Рисунок иллюстрирует достаточно высокую точность предлагаемого аналитического способа расчета(погрешность не превышает 6.5%).
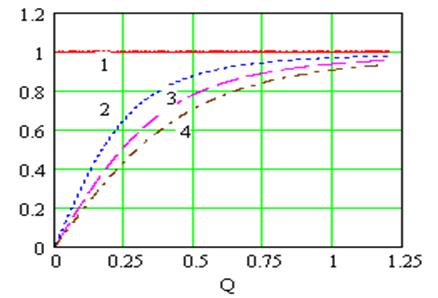 1 – НС = 0; 2 – НС = 0.2; 3 – НС = 0.4; 4 – НС = 0.4 (эксперимент)
1 – НС = 0; 2 – НС = 0.2; 3 – НС = 0.4; 4 – НС = 0.4 (эксперимент)
Рисунок 1.17 – Относительный КПД ЦН при регулировании частотой вращения
Абсолютное значение КПД ЦН определяется, как произведение относительного КПД на номинальное значение
 .
.
Результаты расчета мощности при частотном регулировании ЦН для различных значений Нс (Но =1.3) приведены на рисунке 1.18. Механическая мощность на валу приводного двигателя определялась по (1.18). Разность ординат кривых 3 (дросселирование) и 2 (управление скоростью колеса ЦН) представляет собой величину экономии мощности при переводе насосного агрегата на системы регулируемого электропривода.
Сравнение значений мощности, потребляемой насосом с вала двигателя,указывает на значительный экономический эффект от перевода ЦН на регулируемый привод. Поскольку расчет проведен в относительных единицах и для Но =1.2..1.4,что соответствует параметрам подавляющего большинства насосных агрегатов, мы можем оценить указанный эффект для режима работы конкретного трубопровода с известным НС, используя полученные выше зависимости.
При расчете мощности на валу насоса использовалась полученная ранее кривая КПД насоса. Следует отметить, что КПД насоса с увеличением w несколько возрастает, так как пропорционально мощности изменяются только
 |  | ||
1. 2.
1 – гидравлическая мощность на выходе ЦН; 2 –механическая мощность на валу ЦН при регулировании частотой вращения;
3 – механическая мощность на валу ЦН при регулировании дросселированием
Рисунок 1.18 - Мощность ЦН при регулировании подачи
гидравлические потери в насосе и потери на дисковое трение. Составляющие потерь на трение в подшипниках и в сальниках не увеличиваются пропорционально мощности насоса.
Еще одним существенным преимуществом регулируемого привода насосов является следующее. Электроприводы ЦН выбираются для обеспечения максимально возможного расхода при сохранении необходимого напора в системе. На выходе установки создается давление (порой значительно превышающее номинальное для системы), которое затем снижается оперативной арматурой до требуемого значения. Снижение давления насоса изменением частоты вращения рабочего колеса позволяет уменьшить нагрузки и увеличить срок службы деталей агрегата и снизить утечки в нем.
Современный автоматизированный электропривод ЦН без принципиальных сложностей может быть включен в систему автоматического управления процессом любой сложности.
Все приведенные аргументы позволяют считать регулируемый привод насосов важнейшим средством энерго - и ресурсо -сбережения во всех отраслях, использующих трубопроводный транспорт. Полученные соотношения могут служить основой для экономической оценки внедрения регулируемого электропривода в насосные агрегаты с конкретными характеристиками ЦН и трубопровода.
Лекция 7. Анализ способов регулирования частоты вращения электродвигателей насосных агрегатов. Частотно –регулируемый электропривод центробежных насосов. Регулирование частоты вращения электродвигателей изменением их скольжения. Каскадные схемы регулирования
Цель: выбор способов регулирования выходных параметров ЦН.
Выбор способов регулирования выходных параметров должен выполняться с учетом особенностей режимов работы,параметров регулирования (диапазон, быстродействие), характерных для каждой из рассмотренных групп насосов и оценки энергозатрат на их реализацию.
Как показано в предыдущем разделе, при выборе того или иного типа регулируемого электропривода для насосных агрегатов, наряду с общепринятыми критериями (массогабаритные показатели, стоимость, надежность и т.д.), следует учесть следующие особенности:
- рабочий диапазон регулирования скорости в подавляющем большинстве случаев невелик;
- распространенность, значительные установленные мощности и продолжительный режим работы насосных агрегатов определяют повышенные требования к энергетическим показателям электропривода;
- насосы НПС не требуют предельной точности и высокого быстродействия при регулировании производительности.
Поэтому из возможных вариантов регулирования следует исключить двигатели постоянного тока,уступающие машинам переменного тока по надежности, стоимости, массогабаритным показателям. Далее будут рассмотрены способы регулирования насосных агрегатов на базе асинхронных и синхронных двигателей.
Частоту вращения ротора электродвигателя переменного тока можно определить как
 , (1.29)
, (1.29)
где f - частотa питающего напряжения;
pп - число пар полюсов;
s -скольжение.
Изменяя один или несколько параметров, входящих в(1.29), можно регулировать частоту вращения электродвигателя, и следовательно,насоса. На рисунке 1.22 представлены возможные системы регулируемого электропривода ЦН.
Питание двигателя частотно–регулируемого электропривода осуществляется вентильным преобразователем частоты (ПЧ –рисунок 1.22, а,б), в котором постоянная частота питающей сети  преобразуется в переменную
преобразуется в переменную  . Пропорционально частоте изменяется частота вращения электродвигателя, подключенного к выходу преобразователя. В настоящее время для реализации частотного управления машинами переменного тока применяют различные варианты преобразователей частоты, отличающиеся
. Пропорционально частоте изменяется частота вращения электродвигателя, подключенного к выходу преобразователя. В настоящее время для реализации частотного управления машинами переменного тока применяют различные варианты преобразователей частоты, отличающиеся
принципом действия, схемными решениями,алгоритмами управления и т.д. Исключив из рассмотрения применявшиеся ранее электромашинные ПЧ с известными их недостатками, далее будем рассматривать приводы с современными статическими преобразователями.
Хотя в целом фундаментальные вопросы частотного управления АД и прежде всего принцип управления с ориентацией по потоку двигателя достаточно глубоко разработаны, развитие элементной базы и техники управления, появление новых датчиков, применение микропроцессорного и компьютерного управления обусловливают непрерывное совершенствование системы частотного асинхронного электропривода.
К достоинствам системы ПЧ-АД следует отнести следующее:
- высокий КПД в широком диапазоне регулирования скорости АД, так как последний во всем диапазоне регулирования работает с малой величиной скольжения ротора(малыми потерями скольжения);
- хорошие регулировочные свойства, обеспечивающие возможность плавно регулировать скорость и формировать требуемые характеристики и законы регулирования;
- надежность используемого в системе АД с короткозамкнутым ротором.
Наличие в составе электропривода частотного преобразователя дает основание отнести к группе частотных электроприводов и вентильный двигатель - электромеханическую систему, состоящую из преобразователя частоты,синхронного электродвигателя и устройства, указывающего положение его ротора в пространстве (ДПР – рисунок 1.22,г). Преобразователь выполнен с явно выраженным звеном постоянного тока и состоит из управляемых выпрямителя и инвертора. Коммутация тиристорных вентилей инвертора в зоне малых частот осуществляется с помощью датчика положения ротора, а в зоне частот более 3-5 Гц осуществляется по коммутирующей сверхпереходной ЭДС, получаемой из напряжения на зажимах электродвигателя с помощью узла выделения коммутирующей ЭДС. По принципу действия эта система аналогична электродвигателю постоянного тока, у которого функции коллектора и щеточного аппарата выполняют тиристорный инвертор и датчик положения ротора.
ОАО «Электропривод», АООТ «ЭНИН им. Кржижановского» совместно с ОАО«Электровыпрямитель» в течение 1995-1998 гг. разработаны комплектные высоковольтные ПЧ для пуска и регулирования СД мощностью до 21.5 МВт на напряжения питания 6,10,15 и 75 кВ по схеме «вентильного двигателя» для приводов насосов, вентиляторов и компрессоров [7]. Однако известные сложности реализации ВД ограничивают возможности его широкого внедрения.
Рисунок 1.22 - Варианты систем регулируемого электропривода центробежных насосов
Основным недостатком рассмотренных схем является высокая сложность и стоимость преобразователя, выполняемого на полную мощность электродвигателя. В настоящее время стоимость ПЧ в несколько раз превышает стоимость других типов преобразователей, например, системы АВК. Следует отметить, что стоимость выпускаемых преобразователей частоты значительно завышена также из-за наличия сложных функций, в которых нет необходимости для привода ЦН. Это такие возможности, как прецизионное регулирование на «ползучих»скоростях или формирование сложных пусковых характеристик.
Особые проблемы вызывает использование частотного регулирования мощных ЦН. В высоковольтном (двигатели от 400 кВТ и выше выполняются на напряжение 6 (10)кВ) преобразователе приходится использовать дорогие и сложные вентили на повышенное напряжение. Для снижения общей стоимости системы используют двухтрансформаторную схему включения низковольтного ПЧ, понижая напряжение на его входе и затем повышая выходное напряжение до необходимого, что также увеличивает стоимость и массогабаритные показатели установки..
Регулирование частоты вращения электродвигателей изменением напряжения на его статореосуществляется обычно системой«тиристорный регулятор напряжения – асинхронный двигатель» (ТРН – АД, см.рисунок1.22, в).
Вращающий момент асинхронного электродвигателя пропорционален квадрату напряжения, подводимого к электродвигателю. При изменении напряжения значение критического скольжения не изменяется, поэтому максимальный момент при любых изменениях напряжения соответствует одному и тому же значению критического скольжения, равному примерно 0,1-0,2. Этим определяется сравнительно узкий диапазон регулирования по частоте вращения, который может обеспечить этот способ регулирования. Пределы регулирования можно увеличить,используя АД с повышенным скольжением или включение добавочного сопротивления в цепь фазного ротора, а также применяя системы управления, замкнутые по скорости.
При относительной дешевизне и простоте в обслуживании, основным недостатком данного варианта является то, что энергия скольжения рассеивается в двигателе, а коэффициент мощности системы уменьшается с увеличением скольжения двигателя. В [3,6] проведен анализ возможности использования этого способа для регулирования частоты вращения рабочего колеса насоса в продолжительном режиме и показано, что необходимость завышения в данном случае габаритной мощности двигателя (в два и более раза),использования двигателей со специальным исполнением ротора, наличие дополнительных потерь в двигателе, требующих принудительного отвода тепла от последнего, не позволяют рекомендовать вариант «ТРН-АД» в качестве электропривода насосных агрегатов.
Интерес представляет применение системы «ТРН-АД» для реализации энергосберегающих режимов в зоне номинальной скорости при недогрузках, управления режимами пуска и торможения, а также для электроприводов с режимами кратковременного снижения скорости. В впервые предложено изменять напряжение на двигателе при изменении нагрузки таким образом, чтобы оптимизировать какой либо энергетический показатель –потери в АД, потребляемую мощность, коэффициент мощности [131]. В МЭИ был разработан привод с экстремальным регулятором напряжения, минимизирующим потребляемый двигателем ток при изменении нагрузки [132].
Электропривод центробежных механизмов является основной областью, где системам частотного регулирования асинхронных двигателей (ПЧ-АД) имеется альтернатива – каскадные схемы управления.Наряду с известными преимуществами, первый вариант имеет и значительные недостатки: большая мощность преобразователя, которая, независимо от диапазона регулирования скорости, рассчитывается на полную мощность двигателя, высокая сложность силовой схемы и системы управления и обусловленная всем этим высокая стоимость.
В электроприводепо схеме асинхронного вентильного каскада (АВК см. рисунок 1.22, д) регулирование частоты вращения электродвигателя осуществляется изменением противо- ЭДС инвертора, вводимой в цепь выпрямленного тока ротора асинхронного электродвигателя с фазным ротором. Энергия скольжения ротора рекуперируется в питающую электрическую сеть через преобразователь АВК, который состоит из двух основных элементов: неуправляемого выпрямителя и зависимого инвертора.Согласующий трансформатор необходим в том случае, если номинальное напряжение питающей сети отличается от номинального напряжения преобразователя АВК.
Основными достоинствами данной системы по сравнению с вариантом ПЧ-АД являются меньшая установленная мощность преобразователя,соответствующая глубине регулирования скорости, и простота управления. Как положительное качество отмечается также возможность при аварии в преобразователе перейти в нерегулируемый режим(закоротив ротор) или в режим с пониженной частотой вращения при введении в цепь ротора резистора.
Особенно заметными эти преимущества становятся для центробежных механизмов, момент сопротивления которых зависит от частоты вращения рабочего колеса. Определим мощность скольжения электропривода центробежного насоса из выражения для механической характеристики ЦН (1.27). В первом разделе номинальную частоту вращения ротора в относительных единицах мы приняли за  . Тогда частота вращения электромагнитного поля статора
. Тогда частота вращения электромагнитного поля статора
 , (1.30)
, (1.30)
а частоту вращения ротора в относительных единицах можно записать как
 . (1.31)
. (1.31)
После подстановки в (1.9) и простых преобразований получим
 (1.32)
(1.32)
Зависимость величины мощности,возвращаемой в сеть через преобразователь, от диапазона регулирования ЦН рассчитана по (1.28) в относительных единицах и представлена на рисунке 1.23.В рабочем диапазоне регулирования ЦН эта мощность не превышает 18% номинальной мощности двигателя и уменьшается с увеличением Hc. Таким образом, установленная мощность преобразователя АВК в 4-5 раз меньше, чем в системе ПЧ-АД. Одновременно это ведет к снижению искажающих составляющих токов и напряжений, так как преобразованию подвергается только часть потребляемой приводом мощности.
 Hс =0; 2 - Hc =0.3; 3 - Hc =0.6.
Hс =0; 2 - Hc =0.3; 3 - Hc =0.6.
Рисунок 1.23
Еще одним преимуществом каскадных схем является следующее. Выше указывалось, что для регулирования высоковольтных двигателей в схеме ПЧ –АД используется двухтрансформаторная схема ПЧ, что связано с отсутствием надежных и недорогих вентилей для коммутаций напряжений 6 (10) кВ.Максимальное значение ЭДС ротора E2к таких двигателей лежит в пределах 1..2 кВ, а с учетом диапазона регулирования ЦН (Е2max = Е2к smax)не превышает 600 В. Это позволяет использовать в каскадных схемах низковольтную элементную базу для преобразователей.
Наиболее общим вариантом привода с регулированием мощности скольжения является машина двойного питания ( МДП – рисунок1.22,е ) – асинхронный двигатель, к контактным кольцам ротора которого подводится регулируемое по амплитуде, частоте и фазе напряжение.Сохраняя все преимущества АВК, МДП выгодно отличается более высоким КПД,обусловленным однократным преобразованием энергии скольжения в непосредственном преобразователе частоты (НПЧ). Кроме того, возможность регулирования реактивной мощности по цепи статора позволяет принципиально обеспечить работу привода с единичным (и даже опережающим, как будет показано ниже) коэффициентом мощности.Аналитические соотношения для такого варианта известны [1,8,12,13,14] и используются для теоретических исследований и разработок алгоритмов управления и отдельных схемных решений. Мощность преобразователя МДП, благодаря двухзонному регулированию скорости ниже, чем у АВК, но система управления - сложнее.Учитывая бурное развитие силовой электроники, можно предположить МДП наиболее перспективным вариантом привода ЦН.
Изложенное позволяет утверждать, что каскадные схемы электропривода переменного тока наиболее адаптированы к центробежной нагрузке,в них преобразуется не вся мощность,подводимая к насосному агрегату, а только рекуперируемая мощность скольжения,которая в приводе насосных агрегатов не превышает 18% номинальной мощности электропривода; ограниченный диапазон регулирования насосов позволяет использовать менее мощные и более простые преобразователи, чем при частотном регулировании.
Лекция 8. Преобразователи частоты для управления асинхронными двигателями. Электромагнитные и электромеханические процессы в электроприводе центробежных насосов по схеме «преобразователь частоты – асинхронный двигатель»
Цель:изучить принцип действия и схемные решения ПЧ, применяемые в регулируемых приводах.
В настоящее время для реализации частотного управления машинами переменного тока применяют различные варианты преобразователей частоты (ПЧ), отличающихся принципом действия, схемными решениями, алгоритмами управления и т.д. Исключив из рассмотрения применявшиеся ранее электромашинные ПЧ с известными их недостатками, остановимся на современных статических преобразователях.
По принципу формирования выходного напряжения или тока ПЧ можно подразделить на непосредственные преобразователи частоты (НПЧ, или циклоконверторы) и ПЧ со звеном постоянного тока.
В НПЧ выходная кривая переменного напряжения (или тока) необходимой частоты, амплитуды и фазы формируется из кривых напряжения многофазной системы переменного тока на входе. В устройствах данного типа функции выпрямления напряжения сети и его преобразование в напряжение или ток требуемой частоты выполняются в одном устройстве. Это обусловливает однократное преобразование энергии и высокое значение КПД, малые габариты и массу НПЧ. Они выполняются по тем же схемам, что и выпрямители (однофазные, многофазные, нулевые,мостовые). Для уяснения принципа преобразования на рисунке 17 приведена простейшая схема НПЧ, осуществляющего преобразование трехфазного напряжения промышленной частоты f1 в однофазное напряжение регулируемой частоты f2.
 Преобразователь выполнен по схеме двухкомплектного реверсивного выпрямителя по встречно-параллельной нулевой схеме. Каждая группа 1V и 2V открывается на время, равное полупериоду выходного напряжения Т2/2, причем положитель-ная полуволна формиру-ется при работе группы 1V, отрицательная – группы 2V. Выходное напряжение преобразователя представ-ляяет собой огибающую фазных напряжений (см. рисунок 18).Форма этого напряжения зависит от числа фаз сети, частоты выходного напряжения,которую можно регулировать путем изменения длительности проводимости групп 1V и2V, и т.д.
Преобразователь выполнен по схеме двухкомплектного реверсивного выпрямителя по встречно-параллельной нулевой схеме. Каждая группа 1V и 2V открывается на время, равное полупериоду выходного напряжения Т2/2, причем положитель-ная полуволна формиру-ется при работе группы 1V, отрицательная – группы 2V. Выходное напряжение преобразователя представ-ляяет собой огибающую фазных напряжений (см. рисунок 18).Форма этого напряжения зависит от числа фаз сети, частоты выходного напряжения,которую можно регулировать путем изменения длительности проводимости групп 1V и2V, и т.д.
Недостатком НПЧ является ограниченный диапазон выходной частоты. При частоте питающей сети, равной 50 Гц верхний предел регулирования составляет 25 Гц. Дальнейшее повышение частоты связано с отказом от естественной коммутации вентилей, увеличением фаз питания или подачей на преобразователь напряжения повышенной частоты. Потому область применения НПЧ в регулируемом электроприводе ограничена тихоходными безредукторными электроприводами и схемами управления по цепи ротора (машины двойного питания).
ПЧ со звеном постоянного тока можно подразделить на преобразователи с управляемым выпрямителем и автономными инверторами напряжения или тока (ПЧ с АИ см.рисунок 19) и ПЧ с неуправляемым выпрямителем и широтно-импульсной модуляцией выпрямленного напряжения (ПЧ с ШИМ– рисунок 20).
Оба варианта ПЧ со звеном постоянного тока широко применяются при частотном управлении АД, и будут подробно рассмотрены в данном разделе.
Схемные решения силовой части преобразователей,используемых в ПЧ с АИ и ПЧ с ШИМ достаточно устоявшиеся – это обычно классические трехфазные мостовые схемы. Для уменьшения высших гармоник тока питающей сети и выпрямленного напряжения применяют многофазные схемы выпрямления. Так как значительное увеличение пульсности преобразователей(18-ти, 24-х-пульсные схемы) связано с увеличением их стоимости и конструктивными сложностями, обычно ограничиваются 12-пульсными схемами,получаемыми последовательным или параллельным включением двух 6-пульсных схем.
На рисунке 2.10 дана схема трехфазного преобразователя частоты с автономным инвертором, содержащего трехфазный мостовой управляемый выпрямитель 1В, дроссель фильтра Д1, конденсатор реактивной энергии С0 и автономный трехфазный мостовой инвертор напряжения с коммутирующими емкостями. Двигатель, питающийся от этого преобразователя, не может работать в генераторном режиме параллельно с сетью, т.к. выпрямитель 1В обладает односторонней проводимостью энергии. Для создания возможности генераторного режима необходимо включить встречно – параллельно выпрямителю 1В зависимый, ведомый сетью инвертор. Выпрямитель 1В собран на тиристорах V1-V6, диодах V7-V12, емкостях С1-С6. На блок – схеме обозначено: БУВ – блок управления выпрямителем, БУИ – блок управления инвертором, УК – устройство коррекции, ДН – датчик напряжения, ДТ – датчик тока.
Рисунок2.10
 Рассмотрим принцип действия АИ без учета электромагнитных коммутационных процессов, считая тиристоры идеальными ключами (см.рисунок 2.11).Для построения алгоритма учитывается, что сдвиг фаз между напряжениями Uа, Ub, Uc составляет 2π/3. На рисунке 2.12. отмечена коммутация соответствующих тиристоров V1-V6. На первом интервале (0-2π/3) открыты ключи V1 анодной группы и (поочередно) V6 и V2 катодной группы. Ток протекает по цепи «+»→ V1 →фаза «а» (начало) → «0»статора→фаза «b» (фаза «с») → V6(V2)→ «-». К фазе «а» статора будет приложено напряжение UП/2. На интервале (2π/3 -π) открыты ключи V3 анодной группы и V2 катодной группы. Ток протекает по цепи «+»→ V3 →фаза «b» (начало) → «0»статора→фаза «c» → V2 → «-». К фазе «а» статора напряжение не приложено. На интервале (π -5π/3) открыты ключи V3, V5 (поочередно)анодной группы и V4 катодной группы. Ток протекает по цепи «+»→ V3(V5) →фаза «b» (фаза «c») →«0» статора→фаза «a» → V4 → «-». К фазе «а» статора будет приложено напряжение - UП/2.
Рассмотрим принцип действия АИ без учета электромагнитных коммутационных процессов, считая тиристоры идеальными ключами (см.рисунок 2.11).Для построения алгоритма учитывается, что сдвиг фаз между напряжениями Uа, Ub, Uc составляет 2π/3. На рисунке 2.12. отмечена коммутация соответствующих тиристоров V1-V6. На первом интервале (0-2π/3) открыты ключи V1 анодной группы и (поочередно) V6 и V2 катодной группы. Ток протекает по цепи «+»→ V1 →фаза «а» (начало) → «0»статора→фаза «b» (фаза «с») → V6(V2)→ «-». К фазе «а» статора будет приложено напряжение UП/2. На интервале (2π/3 -π) открыты ключи V3 анодной группы и V2 катодной группы. Ток протекает по цепи «+»→ V3 →фаза «b» (начало) → «0»статора→фаза «c» → V2 → «-». К фазе «а» статора напряжение не приложено. На интервале (π -5π/3) открыты ключи V3, V5 (поочередно)анодной группы и V4 катодной группы. Ток протекает по цепи «+»→ V3(V5) →фаза «b» (фаза «c») →«0» статора→фаза «a» → V4 → «-». К фазе «а» статора будет приложено напряжение - UП/2.
Линейное напряжение находится, как Uab=Ua-Ub. Полученная форма напряжения (см.рисунок 2.13) показывает, что напряжение питания в значительной степени отличается от синусоиды. Аналогичное построение для других фаз показывает, что на выходе сформирована трехфазная система напряжений,сдвинутых относительно друг друга на 120 эл. градусов.
 На рисунке 2.20 представлен однофазный инвертор напряжения с ШИМ. Формирование кривой выходного напряжения иллюстрируется рисунком 2.21.В качестве примера рассмотрена двухполярная односторонняя ШИМ, когда в качестве опорного напряжения используется пилообразное опорное
На рисунке 2.20 представлен однофазный инвертор напряжения с ШИМ. Формирование кривой выходного напряжения иллюстрируется рисунком 2.21.В качестве примера рассмотрена двухполярная односторонняя ШИМ, когда в качестве опорного напряжения используется пилообразное опорное
 напряжение
напряжение  с высокой частотой
с высокой частотой  ,с которой коммутируются вентили силовых групп. Длительность импульсов несущей частоты изменяется с каждым периодом в соответствии с формой модулирующего напряжения
,с которой коммутируются вентили силовых групп. Длительность импульсов несущей частоты изменяется с каждым периодом в соответствии с формой модулирующего напряжения  .Это достигается сравнением опорного напряжения
.Это достигается сравнением опорного напряжения  с модулирующим, и переключение вентилей происходит в момент их равенства.
с модулирующим, и переключение вентилей происходит в момент их равенства.
Тогда выходное напряжение описывается логической функцией
 (2.15)
(2.15)
Выходное напряжение, усредненное за период несущей частоты, можно записать как
 (2.16)
(2.16)
где UП – выпрямленное напряжение на входе инвертора;
t1, t2 – время включенного состояния вентильных групп;
ТН =2π/ωнес – период опорного напряжения.
При синусоидальной ШИМ, обеспечивающей минимальное содержание высших гармонических в Uвых,
 (2.17)
(2.17)
где μ=UM/UMmax – относительное значение глубины модуляции;
UMmax – максимальное напряжение модулирующего напряжения;
ωвых – частота выходного напряжения.
Таким образом осуществляется регулирование величины и частоты выходного напряжения ПЧ с ШИМ.

