 2015-05-20
2015-05-20 2123
2123Цель: ознакомление с законами оптимального управления в ЦН.
При частотном управлении значение электромагнитного момента зависит от частоты и величины напряжения, приложенного к статору электрической машины. Скалярное управление подразумевает управление двумя каналами, заранее связанное какой –либо зависимостью. Законы частотного управления – это соотношения между частотой ω1 и напряжением U1, подаваемыми на статор двигателя АД, обеспечивающие заданные статические характеристики привода. Распространенным на практике является регулирование при постоянном магнитном потоке (U1/ω1=const). С точки зрения энергетики привода, этот вариант может быть использован только при постоянной нагрузке, так как с уменьшением последней поток становится избыточным, что приводит к завышению потерь и неоптимальности этого закона регулирования при переменном моменте нагрузки.
Наличие двух независимых каналов управления дает возможность реализовать в системах частотного регулирования оптимальное управление. Первым из таких вариантов является закон сохранения постоянной перегрузочной способности двигателя, предложенный академиком М.П.Костенко:
 . (2.23)
. (2.23)
Закон определяет, как надо изменять напряжение, когда двигатель с номинальной частоты питания ω1Н переходит на пониженное (повышенное) значение частоты ω1, и что для выяснения нового значения напряжения необходимо учитывать свойства нагрузки.Управляя двигателем в соответствии с выражением (2.23) при ненасыщенной магнитной системе машины, можно сохранить практически неизменным коэффициент мощности и абсолютное скольжение привода, а его КПД независимым от изменения скорости.
Из (2.23) следует зависимость формы взаимосвязанного управления частотой и напряжением от вида нагрузки. Для «упрощенной» центробежной нагрузки, при МС≡ ωα,(2.1) приобретает вид
 . (2.24)
. (2.24)
Вывод соотношения (2.23) справедлив при условии пренебрежения падением напряжения на активном сопротивлении обмотки статора, то есть для крупных машин в диапазоне изменения частот 2:1. При низких частотах увеличивается влияние r1 относительно индуктивных сопротивлений. Напряжение, приложенное к обмотке статора,уравновешивается ЭДС Е 1, индуктируемой основным потокам, и падениями напряжения на активном и индуктивном сопротивлениях:
 ;
;
Е1 =4,44w1 K01f1Ф; (2.25)
где w1,K01 - число витков и обмоточный коэффициент обмотки статора.
Из (2.25) следует, что принципиальная необходимость регулирования напряжения при изменении частоты обусловлена, если отвлечься от предъявляемых к характеристикам двигателя требованиям, насыщением магнитопровода электрической машины. Во избежание насыщения при снижении частоты необходимо уменьшать подводимое к двигателю напряжение.
Для машин средней и малой мощности, а также при широком диапазоне регулирования, оптимальный закон Костенко уточняется:
 . (2.26)
. (2.26)
На рисунке 2.4 представлены механические характеристики АД, работающего на центробежную нагрузку и управляемого по закону (2.23) и рассчитанные по скорректированному соотношению (2.26) (обозначены пунктиром).
Кроме указанного в (2.23) не учитывается величина скольжения, так как частота вращения ротора
 .
.
Погрешность, обусловленная пренебрежением скольжением, тем больше, чем глубже регулирование частоты вращения.
Законы частотного управления должны обеспечивать не только соответствие характеристик двигателя характеристикам нагрузки, но также и экономичность регулирования частоты вращения, которая определяется в значительной степени уровнем потерь в двигателе. Управление АД по (2.23) не обеспечивает работу двигателя с минимальными потерями и является только первым шагом к оптимизации режимов энергопотребления электропривода ЦН.
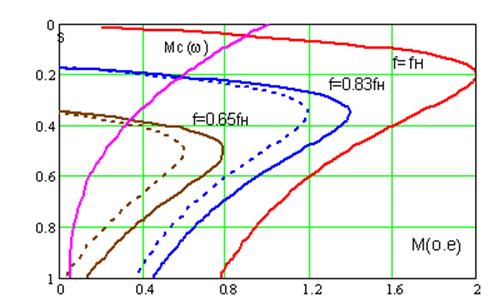 Рисунок 2.4 - Механические характеристики привода ПЧ-АД при центробежной нагрузке
Рисунок 2.4 - Механические характеристики привода ПЧ-АД при центробежной нагрузке
Другим законом управления в функции момента нагрузки, обеспечивающим снижение потерь в двигателе при регулировании, является закон минимального тока [23],который выводится с учетом нелинейности магнитной цепи АД. В [23] устанавливается математическая взаимосвязь момента с потокосцеплением и скольжением для минимизации тока статора. В [19] предложено управление по минимуму потерь, при котором создание необходимого момента, пропорционального произведению тока ротора на поток, осуществляется при равенстве переменных и постоянных потерь,связанных с магнитным потоком АД. Сложность математической интерпретации не позволила в свое время широко распространить этот закон. В настоящее время создание системы управления, реализующей необходимые алгоритмы, вполне реально,что делает предложения [19] актуальными.
Известны и законы оптимального управления, позволяющие минимизировать отдельные составляющие потерь в АД при частотном управлении в статическом режиме.
Исходя из схемы замещения асинхронного двигателя при переменной частоте питающего напряжения, в [122,125], решается задача частотного управления по минимуму потерь. Показано, что для определенных значений момента частоты и напряжения имеет место вполне определенное значение абсолютного скольжения в относительных единицах, при котором потери двигателя будут минимальны. Однако задача решена в линейной постановке и корректность выводов определяется линейной частью кривой намагничивания (при U1< 0,8 U1н), выражения приведены для многих параметров в неявном виде, сложны.
В [67] при ряде допущений даются общие функциональные рекомендации, которым должны удовлетворять законы частотного управления и по напряжению, и по соотношению этих потерь, однако для конкретных механизмов (в том числе насосов) эти вопросы не рассматриваются.

