 2015-05-20
2015-05-20 1238
1238Зубчатой передачей называется трехзвенный механизм, в котором два подвижных звена являются зубчатыми колесами, образующими с неподвижным звеном вращательную или поступательную кинематическую пару.
Зацеплением называется высшая кинематическая пара, образованной зубчатыми колесами передачи. Взаимодействующие поверхности зубьев, обеспечивающие заданный закон движения, называются сопряженными поверхностями.
В учебно-методическом пособии рассматриваются вопросы синтеза прямозубой эвольвентной цилиндрической передачи и планетарного механизма по заданному передаточному отношению. Алгоритм синтеза принято называть геометрическим расчетом зубчатой передачи, в основе которого лежит теорема зацепления. Она устанавливает связь между геометрией сопряженных поверхностей зубьев и законом относительного движения элементов высшей кинематической пары.
Эвольвентное зацепление было предложено профессором Петербургской академии Л. Эйлером в середине XVIII века. Эвольвента – частный случай эпициклоиды, при которой по основной окружности перекатывается круг бесконечно большого радиуса, то есть производящая прямая. Швейцарец Леонард Эйлер (1707-1783) —подробно исследовал теоретические основы и возможности эвольвентного зацепления. На рис. 1.2.1 дан метод графического построения эвольвенты. Свойства эвольвенты:
– единственной величиной, определяющей эвольвенту, является основная окружность радиусом rb;
– эвольвента является симметричной кривой, точка возврата которой лежит на основной окружности и поэтому эвольвента не имеет точек внутри основной окружности;
– нормаль к эвольвенте есть производящая прямая, которая касается основной окружности; отрезок | АБ | производящей прямой равен радиусу кривизны эвольвенты к данной точке А;
– при увеличении радиуса основной окружности эвольвента постепенно теряет свою кривизну, при rb → ∞ эвольвента преобразуется в прямую линию.
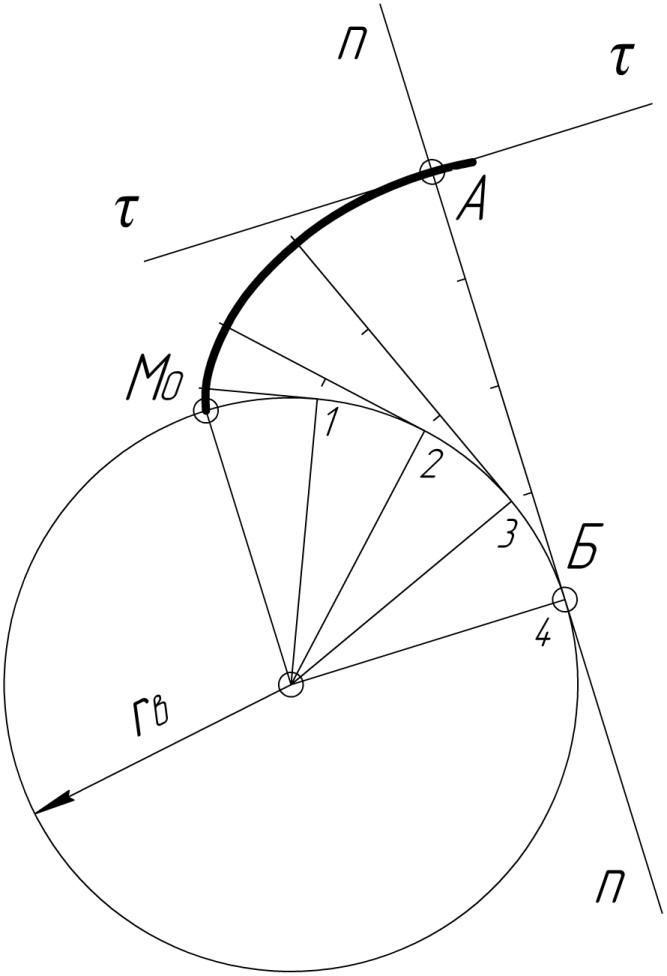
Рис. 1.2.1. Эвольвента








