 2015-05-20
2015-05-20 5479
5479Индивидуальное домашнее задание № 1
по дисциплине:
БЕЗОПАСНОСТЬ ЖИЗНЕДЕЯТЕЛЬНОСТИ
| Исполнитель: | |||||
| студент группы | З-5А2Г1/22 | Исаев Исабек Дюсанбаевич | 11.05.2015 | ||
| Руководитель: | |||||
| преподаватель | Гуляев Милий Всеволодович | ||||
Томск ¾ 2015
| № варианта |
Цель и методика построения дерева «причин – опасностей».
Цель работы: ознакомиться с методикой построения дерева опасностей и их причин, использкемой при системном анализе безопасности.
1. Основные теоретические положения
1.1. Целью системного анализа безопасности является:а) выявление причин, влияющих на появление нежелательных событий, т.е. аварий, катастроф, травм, пожаров и т. д. б) разработка мероприятий, которые позволят предупредить или снизить вероятность появления этих событий.
Анализ безопасности может осуществляться априорно или апостериорно. И в том, и в другом случаях, метод может быть прямым или обратным.
Суть Априорного анализа заключается в том, что исследователь выбирает потенциально возможные для данной системы нежелательные события, и составляет набор различных возможных ситуаций, которые могут привести к этим событиям.
После происществия нежелательных событий проводится апостериорный анализнежелательные события уже произошли. Целью такого анализа являетс я -разработка рекомендаций на будущее. Оба анализы дополняют друг друга. При прямом методе изучаются причины, что бы предвидеть последствия. Обратный метод состоит в анализе последствий, чтобы определить причины.
Предотвращение опасностей или защита от них базируется на знании причин их появления. Любая опасность реализуется, принося ущерб, благодаря какой-то причине или группе причин. Между реализованными опасностями и причинами существует причинно-следственная связь.
Таким образом, причины и опасности образуют цепные, иерархические структуры или системы. Для изображения этих структур используют графовое представление. Ветвящиеся графы называют деревьями В отечественной и зарубежной литературе используют следующие термины: "дерево отказов", "дерево опасностей", "дерево причин" и т. д. Учитывая наличие в деревьях ветвей причин и ветвей опасностей, которые иногда невозможно разделить, целесообразно данный граф (дерево) называть «графом (деревом) опасностей и их причин». Построение «деревьев» является исключительно эффективной процедурой выявления причин различных нежелательных событий, таких как аварии, травмы, пожары и т.д.
1.2. При построении «дерева опасностей и их причин» применяют аппарат алгебры логики. В большинстве случаев используется булев базис (булева алгебра). Булевым базисом называется набор трех логических функций
НЕ, ИЛИ, И.
Логическая функция (функция алгебры логики) - это функция одного или нескольких аргументов, где аргументы представляют собой логические переменные и образуют (в случае нескольких аргументов) некоторое множество комбинаций своих возможных значений. Функции алгебры логики принимают значения 1 или 0 в зависимости от значений своих аргументов. Под логической операцией будем понимать сложное событие получаемое путем логических операций над простыми событиями.
Одна из форм задания логической функции- таблица истинности. в которой перечисляются все возможные комбинации значений аргументов и против каждой комбинации записывается значение логической функции.
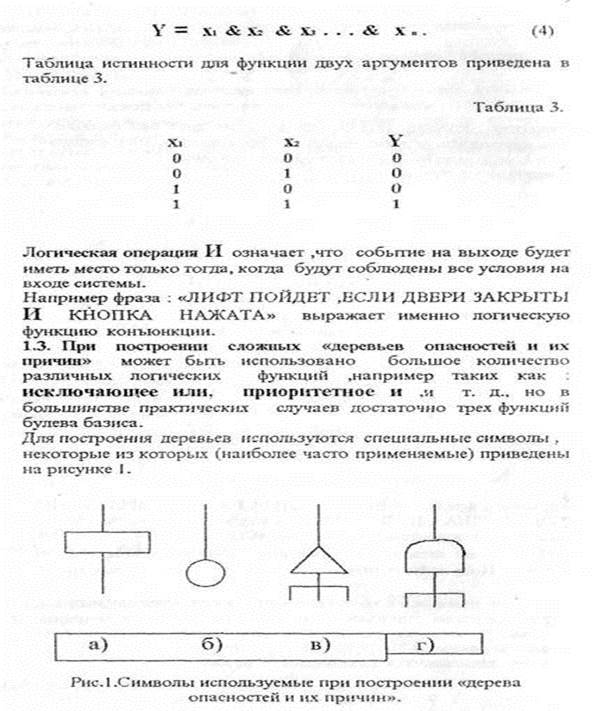
На рисунке 1 а изображен символ результирующего события,
которое наступает в результате конкретной комбинации первичных (исходных) событий (рис. 1б). Результирующее событие может быть завершающим (главным) или промежуточным (изображено на рис. 1а).
На рисунке 1в приведен символ логической схемы(операции, функции) ИЛИ, а на рисунке 1 г символ схемы И. Иногда применяют деревья с большим числом видов символов, обозначающих логические связи различных типов, однако в большинстве случаев при решениипрактических задач достаточно символов, приведенных на рисунке 1. Основной проблемой при анализе безопасности является установление параметров или границ системы. Многоэтапный процесс ветвления «дерева» требует введения ограничений с целью определения его пределов.
Если система будет чрезмерно ограничена, то появляется возможность получения разрозненных несистематизированных предупредительных мер, т. е. некоторые опасные ситуации могут остаться без внимания.
С другой стороны, если рассматриваемая система слишком обширна, то результаты анализа могут оказаться крайне не определенными.
Перед исследователем стоит также вопрос о том до какого уровня следует вести анализ. Ответ на этот вопрос зависит от конкретных целей анализа. Общий же подход состоит в том, чтобы выявить события на которые в данной конкретной ситуации можно влиять посредством предупредительных мер. Таким образом, границы ветвления в общем случае определяются логической целесообразностью получения новых ветвей.
1.4. Рассмотрим построение «дерева опасностей и их причин», приведенного на рисунке 2 на простом примере.
На рисунке 2 введены следующие обозначения:
А- промежуточное результирующее событие.отсутствие напряжения в питающей сети.
В - промежуточное результирующее событие, отказало (не сработало фотоблокировочное устройство (отсутствие световой сигнализации).
С - промежуточное результирующее событие, оператор зашел за ограждение.
D - главное результирующее событие, авария, производственная травма.
1 - исходное событие, отказ силового предохранителя цепи питания.
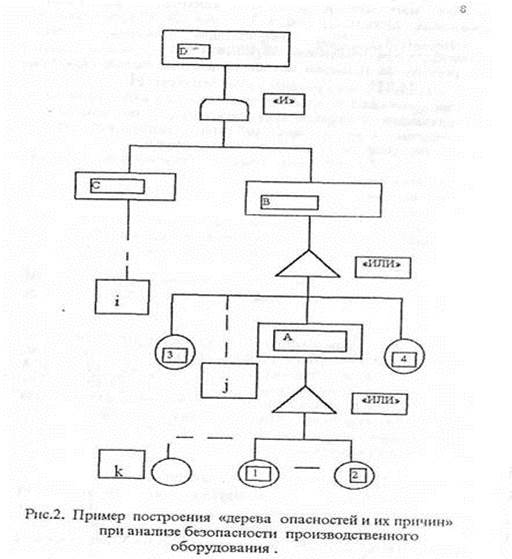 |
2 - исходное событие, аварийное отключение электроэнергии,
обрыв кабеля электропитания фотоблокировочного
устройства.
3 - исходное событие, отказ светоизлучателя (блока
светодиодов) или светоприемника (блока фотодиодов).
4 - исходное событие, отказ элементов или цепей коммутации
светового сигнального устройства.
Приведем словесное описание алгоритма построения «дерева» показанного на рисунке 2 при априорном анализе безопасности некоторого производственного процесса.
Оператор обслуживающий роботизированный комплекс можег получить механическое травму в случае попадания его в опасную зону движения манипулятора промышленного робота.
РТК имеет следующие средства безопасности: стационарные ограждения, а также фотоблокировочное устройство, останавливающее робот при пересечении оператором непосредственно опасной зоны. Поэтому, такая аварийная ситуация возможна, если оператор зашел за ограждение и фотоблокировочное устройство не сработало. Для упрощения «дерева» рассмотрим только одну его «ветвь» - отказ фотоблокировочного устройства (событие В). Это событие возможно. если произойдет хотя бы одно исходное событие 3 или 4 или промежуточное результирующее событие (А) или все эти события одновременно (что маловероятно). В свою очередь событие А может произойти,если произойдет хотя бы одно исходное события 1 и 2 или оба этих события одновременно
Выводы
1. Безопасность жизнедеятельности (БЖД) – наука о комфортном и безопасном
взаимодействии человека со средой обитания.
2. Состояния взаимодействия в системе «человек – среда обитания»:
комфортное (оптимальное);
допустимое (нейтральное);
опасное (вредное);
чрезвычайно опасное (ЧП).
3. Опасность – это процессы, явления, предметы, оказывающие негативное
влияние на жизнь и здоровье человека, способные причинить ущерб природ-
ной среде.
4. Любая деятельность человека потенциально опасна.
5. Опасность перманентна (постоянна), потенциальна (возможна), всеобща.
6. Риск – количественная характеристика действия опасностей, формируемых
конкретной деятельностью человека. Приемлемый риск равен менее 10-6

