 2015-05-10
2015-05-10 347
347Лабораторная работа №1
Расчет параметров ПИД-регуляторов
Цель работы: изучение процедуры расчета параметров регулятора, обеспечивающих требуемое качество регулирования.
Общие сведения.
Обобщенная структурная схема локальной системы (ЛС) приведена на рис. 1. 1.
 |
Рисунок 1.1 – Обобщенная структурная схема ЛС
М – возмущение по нагрузке;
Y0 – задание;
х – отклонение регулируемой величины Y от задания;
μ – регулирующее воздействие.
В работе рассматриваются объекты, динамические свойства которых можно описать дифференциальным уравнением первого порядка с запаздыванием. В этом случае  , где Коб – коэффициент усиления, Тоб – постоянная времени объекта, t - запаздывание; p – комплексная частота (p = σ + i ω).
, где Коб – коэффициент усиления, Тоб – постоянная времени объекта, t - запаздывание; p – комплексная частота (p = σ + i ω).
Передаточная функция системы по заданию  , а передаточная функция по нагрузке –
, а передаточная функция по нагрузке –  .
.
При выполнении работы необходимо вспомнить понятие качества регулирования. Типовые переходные процессы приведены на рисунке 2.

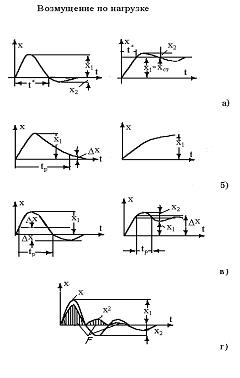
Рисунок 1.2 – Типовые переходные процессы в системах:
а) переходной процесс с 20%-ным перерегулированием; б) переходной процесс без перерегулирования; в) переходной процесс с минимальным временем регулирования; г) переходной процесс системы с минимальной интегральной квадратичной оценкой
Рассмотрим типовые процессы.
Переходной процесс с 20%-ным перерегулированием (рисунок 1.2,а). При скачкообразном возмущении отклонение регулируемой величины за возможно более короткий промежуток времени t достигает установившегося значения, потом превышает его на 20% (х2/х1=0.2). Если установившееся значение равно нулю, то 20% считают от максимального значения отклонения (рисунок 1,а). За показатели переходного процесса принимаются х1 и t.
Переходной процесс без перерегулирования (рисунок 1.2,б). При скачкообразном возмущении отклонение регулируемой величины за возможно более короткое время без перерегулирования приближается к своему установившемуся значению. За показатели переходного процесса принимаются х1 и время регулирования. Под временем регулирования tp понимаем время от момента появления отклонения IхI>Δх в САР после подачи скачкообразного возмущения до момента, когда это отклонение не будет превышать значение ±Δх. Величина Δх характеризует допустимую динамическую погрешность системы.
Переходной процесс с минимальным временем регулирования (рисунок 1.2,в). При скачкообразном возмущении отклонение регулируемой величины за возможно более короткий промежуток времени tp min становится меньше значений ±Δх. За показатели процесса принимаются х1 и tp.
Переходной процесс системы с минимальной интегральной квадратичной оценкой (рисунок 1.2,г) при скачкообразном возмущении по нагрузке и заданию.
В данной работе при расчете параметров регулятора используется метод номограмм. В приложении 1 приведены программы расчета в среде MATHCAD. Сами программы расположены d:\student\new. Необходимо выбрать ту, в которой рассчитываются параметры при заданном в задании качестве.








