2015-05-10
2015-05-10 440
440| № вари анта | Коб | Тоб | t | Тип процесса регулирования |
| 0.5 | 20% перерегулирование по заданию | |||
| 0.2 | Без перерегулирования по заданию | |||
| 20% перерегулирование по заданию | ||||
| 0.3 | Min СКО по заданию | |||
| Min СКО по заданию | ||||
| Без перерегулирования по нагрузке | ||||
| 0.01 | 0.1 | Без перерегулирования по нагрузке | ||
| 4.5 | 0.2 | 20% перерегулирование по нагрузке | ||
| Min СКО по нагрузке | ||||
| 3.14 | Min СКО по нагрузке | |||
| 0.5 | Без перерегулирования по заданию | |||
| 20% перерегулирование по нагрузке |
Пример выполнения задания и графики переходных процессов приведены на рисунке 1.3.
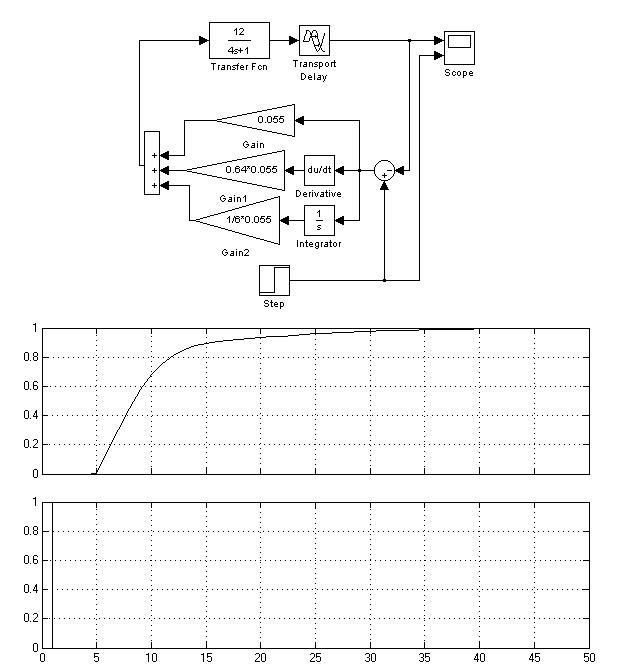
Рисунок 1.3 – модель объекта 1 порядка и переходные процессы
Для подтверждения достижения требуемого качества регулирования показать процесс на выходе объекта и на разностном элементе.
Отчет должен содержать:
- задание
- рассчитанные параметры ПИД-регулятора
- две собранные схемы с результатами их работы
Приложение 1
Программы расчета параметров регуляторов
на основе
метода номограмм в среде MathCad
Программа расчета параметров регулятора для обеспечения переходного процесса с 20% перерегулированием при возмущении по заданию
Параметры объекта: T - постоянная времени объекта; Ko - коэффициент усиления;to - запаздывание



K - коэффициент пропорциональности; TI - постоянная времени интегрирования; TD - постоянная времени дифференцирования
20% перерегулирование при возмущении по заданию

















Программа расчета параметров регулятора для обеспечения переходного процесса с 20% перерегулированием при возмущении по нагрузке
Параметры объекта: T - постоянная времени объекта; Ko - коэффициент усиления;to - запаздывание



K - коэффициент пропорциональности; TI - постоянная времени интегрирования; TD - постоянная времени дифференцирования
20% перерегулирование при возмущении по нагрузке








Программа расчета параметров регулятора для обеспечения переходного процесса без перерегулирования при возмущении по заданию
Параметры объекта: T - постоянная времени объекта; Ko - коэффициент усиления;to - запаздывание



K - коэффициент пропорциональности; TI - постоянная времени интегрирования; TD - постоянная времени дифференцирования
без перерегулирования при возмущении по заданию









Программа расчета параметров регулятора для обеспечения переходного процесса без перерегулирования при возмущении по нагрузке
Параметры объекта: T - постоянная времени объекта; Ko - коэффициент усиления;to - запаздывание



K - коэффициент пропорциональности; TI - постоянная времени интегрирования; TD - постоянная времени дифференцирования
без перерегулирования при возмущении по нагрузке









Программа расчета параметров регулятора для обеспечения переходного процесса с минимальным временем регулирования при возмущении по нагрузке и по заданию
Параметры объекта: T - постоянная времени объекта; Ko - коэффициент усиления;to - запаздывание


K - коэффициент пропорциональности; TI - постоянная времени интегрирования; TD - постоянная времени дифференцирования
С минимальным временем регулирования при возмущении по нагрузке и по заданию








Программа расчета параметров регулятора для обеспечения переходного процесса с минимальной квадратичной ошибкой при возмущении по нагрузке и по заданию
Параметры объекта: T - постоянная времени объекта; Ko - коэффициент усиления;to - запаздывание
K - коэффициент пропорциональности; TI - постоянная времени интегрирования; TD - постоянная времени дифференцирования
ререгулирование с минимальной квадратичной оценкой при возмущении по нагрузке и по заданию