 2015-05-10
2015-05-10 354
354Лабораторная работа №5.
РАСЧЕТ И НОРМИРОВАНИЕ ДИНАМИЧЕСКОЙ ПОГРЕШНОСТИ ИЗМЕРИТЕЛЬНЫХ КАНАЛОВ ИИС
Основные теоретические положения
При нормировании динамической погрешности по ГОСТ Р 8.009 используются 3 вида параметров или характеристик:
1. минимальное время измерений, или максимальная частота входного сигнала (основной способ нормирования динамической погрешности),
2. амплитудно-частотная (АЧХ) и фазовая частотная (ФЧХ) характеристики измерительного канала ИИС,
3. передаточная функция измерительного канала ИИС по Лапласу.
При расчете и нормировании динамической погрешности измерительный канал (ИК) ИИС и входящие в него измерительные преобразователи (ИП) рассматривают как линейные системы. Линейная система описывается в общем случае обыкновенным дифференциальным уравнением следующего вида

| (1) |
где Х (t), Y (t) - входной и выходной сигналы ИК ИИС или измерительного преобразователя, Ai, Bi - коэффициенты.
Из уравнения (1) можно получить бесконечное множество моделей ИП. Однако на практике используют не более 5-7 основных вариантов, называемых типовыми динамическими звеньями. Описание звеньев приведены в таблице 1.
Таблица 1.
Виды динамических звеньев и их передаточные функции
| Название типового звена | Дифференциальное уравнение (временное представление) | Функция преобразования по Лапласу |
| усилительное |  ,
где k - чувствительность ИП в статическом режиме, ,
где k - чувствительность ИП в статическом режиме,  . .
| 
|
| апериодическое (инерционное) |  ,
где T - постоянная времени звена, сек. ,
где T - постоянная времени звена, сек.
| 
|
| колебательное |  ,
где ,
где  - коэффициент демпфирования (затухания колебаний), - коэффициент демпфирования (затухания колебаний),  , ,  соответствует отсутствию гашения колебаний, соответствует отсутствию гашения колебаний,  - максимально возможному подавлению колебаний. - максимально возможному подавлению колебаний.
| 
|
| дифференцирующее | 
| 
|
| интегрирующее | 
| 
|
Для решения уравнения (1) принято использовать преобразование Лапласа вида
| (2) |
где F (p) – функция-изображение комплексной переменной р, f (t) – функция-оригинал от времени t.
Использование преобразования (2) позволяет заменить производные и интегралы в уравнении (1) на операции умножения и деления в соответствии с правилами
| (3) |
где  - символ преобразования Лапласа. Такая замена позволяет решать уравнение (1) как алгебраическое.
- символ преобразования Лапласа. Такая замена позволяет решать уравнение (1) как алгебраическое.
Для расчета и моделирования динамических свойств звена необходимо знать как изменяется функция преобразования в зависимости от времени. Для типовых звеньев функция преобразования по Лапласу приведена в таблице 1. Обычно каждому ИП приписывают то или иное динамическое звено и по паспортным данным определяют параметры звена. Учитывая, что ИК ИИС включает несколько ИП, то в зависимости от способа их включения различают несколько способов получения общей функции преобразования (табл. 2).
Таблица 2.
Виды включения звеньев и правила формирования передаточных функций
| Название включения | Структурная схема | Общая функция преобразования по Лапласу |
| последовательное (основной вариант в ИК ИИС) | 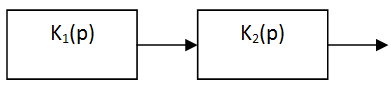
| 
|
| параллельное | 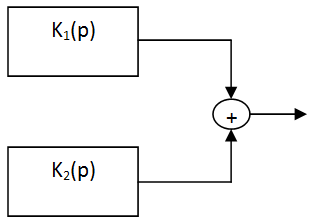
| 
|
| отрицательная обратная связь | 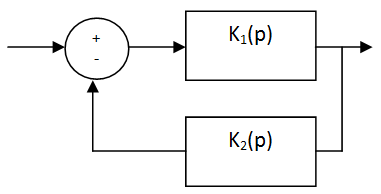
| 
|
| положительная обратная связь | 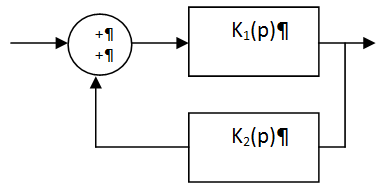
| 
|
Расчет и нормирования динамической погрешности при ручном расчете представляет собой трудоемкую задачу. Поэтому большинство систем моделирования на ЭВМ позволяют решить задачу расчета выходного сигнала динамической системы. Рассмотрим моделирование динамической погрешности ИК ИИС в Simulink. Расчет и нормирования динамической погрешности ИК ИИС проводится по следующим этапам:
1. анализ структурной или функциональный схем ИК ИИС;
2. определение вида типового динамического звена для каждого ИП ИК ИИС;
3. определение параметров типовых динамических звеньев;
4. задание тестового сигнала при помощи соответствующего блока в Simulink, обычно это ступенчатая функция (блок Step) или синусоидальный сигнал;
5. задание функции преобразования для каждого из преобразователей при помощи блока Transfer Fcn (группа Continious) и определение ее параметров;
6. соединение блоков в соответствии со схемой из пункта 1;
7. моделирование и анализ результатов. Для анализа результатов обычно анализируется график выходного сигнала по отношению к входному сигналу полученный в блоке Scope. В зависимости от способа нормирования определяют минимальное время измерений (максимальную частоту входного сигнала) или строят графики АЧХ и ФЧХ в Simulink. Для 3 способа нормирования общую функцию преобразования получают при ручном расчете на основе данных таблиц 1 и 2.
Примечание: для того, чтобы построить графики АЧХ и ФЧХ в Simulink необходимо в созданную схему добавить входной (рис. 1) и выходной (рис. 2) порт. Порты добавляются при помощи правой кнопки мыши и выбираются команды приведенные на рис. 1 и 2. Входной порт добавляется перед первым блоком Transfer Fcn, выходной порт после последней Transfer Fcn моделирующей ИК ИИС (рис. 3).
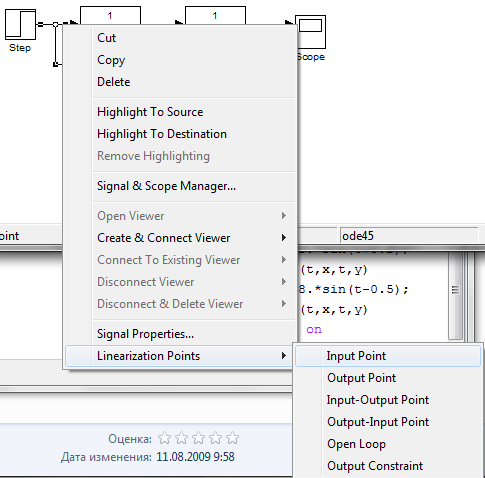
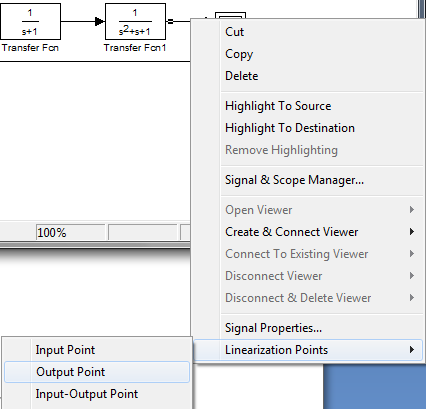
Рис. 1. Добавление входного порта Рис. 2. Добавление выходного порта
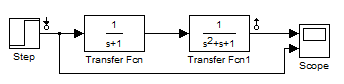
Рис. 3. Блок схема в Simulink с входным и выходным портами
Затем выбирается команда в меню Tools->Control Design->Liner Analysis (рис. 4).
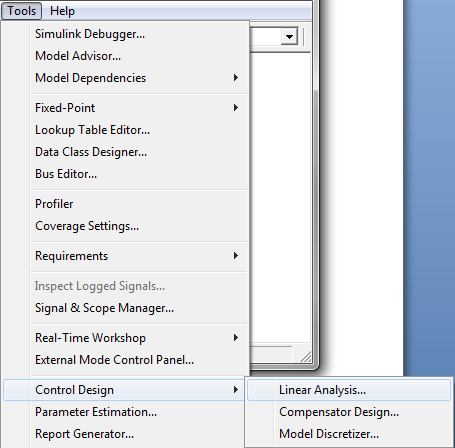
Рис. 4. Загрузка модуля анализа линейных систем
В окне модуля анализа линейных систем (рис. 5) можно построить отклик системы на ступенчатое воздействие (в списке Plot Liner Analysis выбрать Step response plot), АЧХ и ФЧХ (в списке Plot Liner Analysis выбрать Bode response plot). Для построение графика после выбора соответствующего значения в списке Plot Liner Analysis используется кнопка Linerize Model.
Следует учитывать, что графики АЧХ и ФЧХ строятся в логарифмическом масштабе по оси абсцисс, а по оси ординат на АЧХ откладывается следующая функция

| (4) |
где  - амплитуда выходного сигнала в зависимости от частоты,
- амплитуда выходного сигнала в зависимости от частоты,  - логарифмическая мера амплитуды выходного сигнала в зависимости от частоты, дБ.
- логарифмическая мера амплитуды выходного сигнала в зависимости от частоты, дБ.
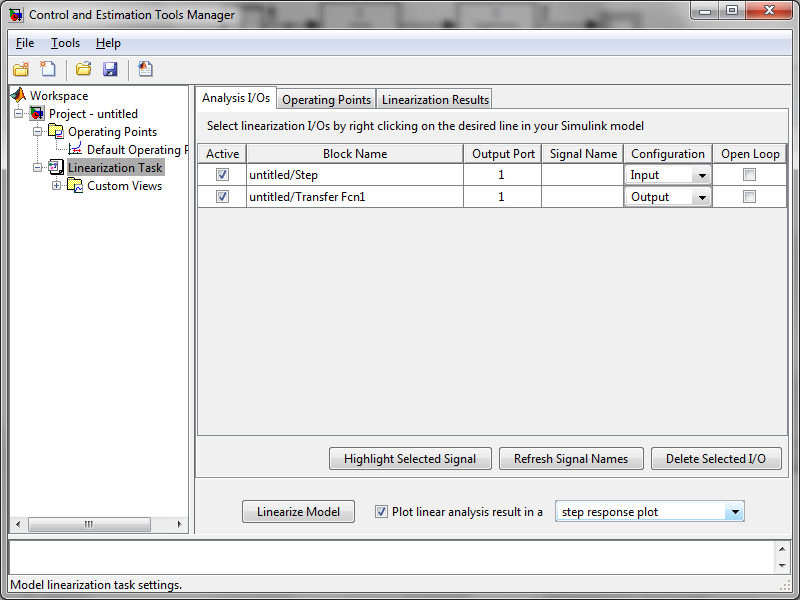
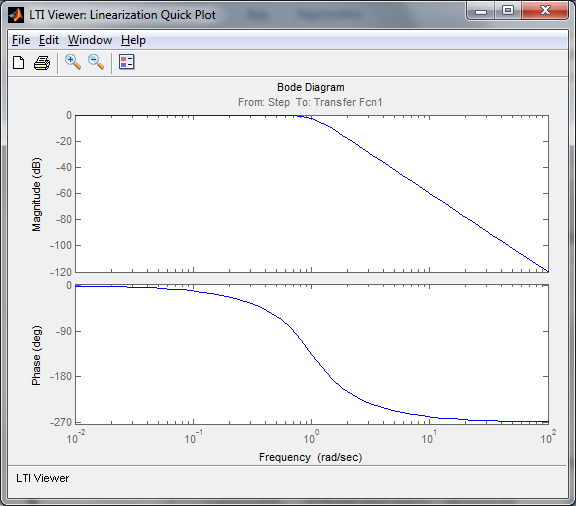
Рис. 5. Окно модуля анализа линейных систем Рис. 6. Окно графиков АЧХ и ФЧХ








