 2015-05-13
2015-05-13 428
428Линейные и линеаризуемые системы
Динамические характеристики
звеньев и САУ
В данном разделе изучаются состояния элементов САУ при изменении во времени их параметров с учётом факторов, вызывающих эти изменения.
Динамические характеристики показывают изменения какого-либо параметра во времени или в частотной области. По этому признаку различают:
1) переходные характеристики, получаемые при ступенчатом входном воздействии;
2) частотные характеристики, получаемые при гармоническом входном воздействии.
Для математического описания динамических процессов используют дифференциальные уравнения, связывающие параметры САУ  и их производные
и их производные  с возмущающими и управляющими воздействиями.
с возмущающими и управляющими воздействиями.
Уравнение движения системы в общем случае имеет вид
 . (2.1)
. (2.1)
Уравнение составлено относительно произвольного искомого параметра x, являющегося выходным сигналом системы. Коэффициенты при производных (a0, a1, an) – постоянные коэффициенты, зависящие от параметров объекта регулирования и регулятора. Когда правая часть линейного дифференциального уравнения равна нулю (f(t)=0), то уравнение описывает свободное движение системы, т. е. движение, происходящее в системе под действием лишь смены начальных условий. В общем случае решение неоднородного дифференциального уравнения (2.1) ищется как сумма общего решения однородного дифференциального уравнения (без правой части) -  и частного решения
и частного решения  в форме правой части:
в форме правой части:
xΣ(t) = xсвоб(t) + xвын(t).
При составлении уравнений движения используются соответствующие физические законы (для механических систем – принцип Даламбера, для электрических цепей – закон Кирхгофа и т. д.).
Рассмотрим примеры: выведем уравнение механической колебательной системы (рис. 2.1). По принципу Даламбера  .
.
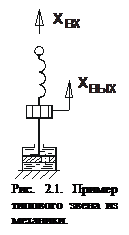
 - сила инерции (пропорциональна ускорению),
- сила инерции (пропорциональна ускорению),
 - сила трения (пропорциональна скорости),
- сила трения (пропорциональна скорости),
 - сила жёсткости пружины (пропорциональна перемещению),
- сила жёсткости пружины (пропорциональна перемещению),
где  - масса подвижных элементов;
- масса подвижных элементов;
 - коэффициент вязкого трения;
- коэффициент вязкого трения;
 - жесткость пружины.
- жесткость пружины.
В соответствии с принципом Даламбера
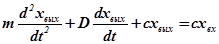
При  - состояние покоя; при
- состояние покоя; при  - вынужденное движение.
- вынужденное движение.
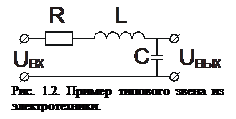 Выведем уравнение электрического колебательного контура (рис. 2.2). Используя 2-й закон Кирхгофа, можно записать для рассматриваемой электрической цепи:
Выведем уравнение электрического колебательного контура (рис. 2.2). Используя 2-й закон Кирхгофа, можно записать для рассматриваемой электрической цепи:
 .
.
Падения напряжений на индуктивности L, активном сопротивлении R и ёмкости С определяются по формулам:
 ,
,  ,
,  , где
, где  .
.
С учётом этого исходное уравнение принимает вид:
 .
.
Аналогичным образом выводятся уравнения движения для различных звеньев (в том числе гидравлических, пневматических и др.).
Динамические характеристики нужны для определения:
1) качества регулирования системы
а) перерегулирования в системе (заброс);
б) быстродействия;
в) числа колебаний системы за время переходного процесса;
2) устойчивости системы;
3) оценки динамической и статической погрешности.








