 2015-05-13
2015-05-13 2154
2154Усилия, действующие на станок-качалку
Одним из важнейших силовых факторов является тангенциальное усилие, действующее на палец кривошипа. В соответствии с теоремой Н.Е. Жуковского о жестком рычаге уравнение работы сил, приложенных к нему, можно записать в общем виде
i=k
ТuT cos(Т, uT)=S[Piui cos(Piui)- Piиui cos(Piиui)], (1)
i=1
где Т – тангенциальная составляющая усилия, действующая на палец кривошипа; uT - скорость движения точек приложения этой силы; Pi - силы, приложенные к рычагу; ui - скорости движения точек приложения сил; Piи - силы инерции, обусловленные действиями сил Pi, (Pi,ui)- угол между направлением сил Pi и скорости ui.
В рассматриваемом случае uT =wr, (T,uT)=0
Piи = (Pi ait)/g,
где ait– тангенциальное ускорение точки приложения силы Pi.
Подставив значения в формулу, получим
i=k
Тwr=SPiui [cos(Piui)- ait/g ]. (2)
i=1
Схема действия сил, приложенных к балансирному станку-качалке, показана на рис.
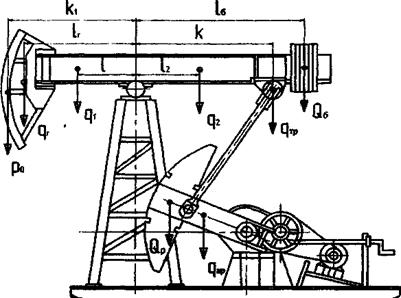
Схема усилий, действующих на балансирный станок-качалку
Весами отдельных деталей, таких, как шатун, различного рода крепежные и регулировочные устройства, установленные на балансире, пренебрегаем, поскольку их величины намного меньше весов перечисленных выше деталей.
Подставим приведенные выражения в основное уравнение (2) и введем следующие обозначения: Q- общий вес балансира с уравновешивающим грузом, L- расстояние от центра тяжести балансира до оси качания, Li- радиус инерции массы, Q/g.
После несложных преобразований получим
T = (uB / wr k)(P0 k1- L cosd+ Li2 Q /g× aВt/ k)- Qp sinj. (3)
Приведенная формула является обобщенно, позволяющей вычислить тангенциальную силу в течение двойного хода точки подвеса штанг. Из нее следует, что усилие определяется нагрузкой Р0 в точке подвеса штанг, положением кривошипа и балансира, тангенциальным ускорением балансира, соотношением длин отдельных элементов станка-качалки, весов и масс отдельных деталей и уравновешивающих грузов.
Пренебрегая массами деталей станка-качалки для различных способов уравновешивания, получим:
для роторного уравновешивания Тр = (uB k1/ wr k)P0 - Qp sinj. (6.6)
Если установка не уравновешена вообще, т.е. Qб=0, Qp=0, то уравнение (6.3) примет вид Т = (uB k1/ wr k)P0 . (6.7)
Для определения мощности двигателя СК сущ-ет множество формул. Наиболее распространённой и дающей более близкие результаты к фактическим показателям является формула, согласно которой эффективная мощность электродвигателя, кВт:

где ko — относительный коэффициент формы кривой вращающего момента на валу электродвигателя, равный отношению фактического коэффициента формы кривой к коэффициенту формы для синусоиды, равному 1,11, т.е. k0=kф/1,11;
kA — поправочный коэффициент, зависящий от отношения истинного пробега плунжера к длине хода сальникового штока (учитывающий влияние деформации штанг и труб); dн — диаметр плунжера насоса в мм; Н — глубина подвески насоса в м; s — длина хода сальникового штока; n — число качаний балансира в минуту; NО — постоянные потери в станке-качалке, не зависящие от нагрузки (потери «холостого хода») в кВт.
По значению NЭ, найденному по приведенной формуле, подбирается двигатель с номинальной мощностью NН так, чтобы NН>NЭ.
33 Станок-качалка цепным приводом (конструкция «ТатНИПИнефть»). Регулирование числа качаний.
33.Применение на скважинах с дебитом по жидкости до 130 м3/сут позволит по сравнению с УЭЦН получить примерно двукратное сокращение удельныхэнергозатрат на подъем продукции, т. к. КПД УЭЦН, как правило, не превышает 30 %. За счет большой длины хода цепных приводов необходимая производительность обеспечивается при частоте качаний до 4 мин-1, что снижает динамические нагрузки на штанги и привод, а также цикличность приложения нагрузок. Все это создает предпосылки существенного увеличения ресурса штанг и МРП скважин. Кроме того, в отличие от УЭЦН, обеспечивается возможность регулирования режима эксплуатации скважины в рамках технической характеристики привода без потери КПД и привлечения бригады ПРС для замены установки на другой типоразмер.
Для приведения в действие СШН при осуществлении технологического процесса используются длинноходовые цепные приводы ПЦ 80-6-1/4 и ПЦ 120-7,3-1/4 производства БМЗ, либо приводы ROTAFLEX различных модификаций. С технологической точки зрения все цепные приводы имеют следующие особенности:
− фиксированную длину хода;
− реверсивный редуцирующий преобразующий механизм, совмещенный с частью уравновешивающего груза фиксированной массы;
− благоприятный закон движения штанг с равномерной скоростью на большей части хода и относительно низкой частотой качаний;
− максимальную скорость штанг в 1,7 раза меньше, чем у балансирных аналогов при равной частоте качаний;
− при ремонте скважины откатываются от устья на необходимое расстояние.
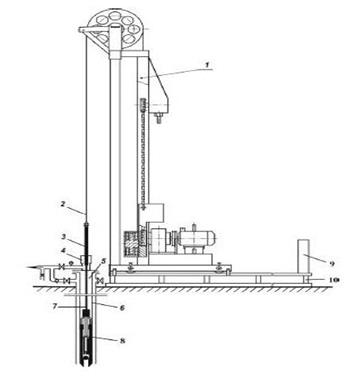
1 — цепной привод, 2 — канатная подвеска,
3 — устьевой шток, 4 — сальник, 5 —устьевая арматура,
6 — колонна НКТ, 7 — колонна штанг, 8 — скважинный насос,
9 — станция управления, 10 — основание
Рисунок 1 — Схема УСШН с цепным приводом








