 2015-07-14
2015-07-14 685
6851. Пояснити значення літер і цифр в умовному позначенні типорозміру асинхронного двигуна 4AH180S8OM2. Розрахувати синхронну частоту обертання ротору.
4А серия
Н защитное исполнение еорпуса
Х исполнение корпуса(станина алюми, щиты чугунные А-станина и щиты АС если отсутствует чугун сталь)
180 установочные размер по высоте оси вращения в мин
S установочный размер по длине станины
8 чмсло полючов
ОМ условия эксплотации
2- (меньший по размеру двигателя цифра сравнения климатических условий предназначен для размещения на открытом воздухе
Разчет синхрону частату обертання
W0=W1=2Пf1/Р
| 2. | Авторульовий типу АТР 2-10. Устрої, що диференціюють та інтегрують. |
Билет 6
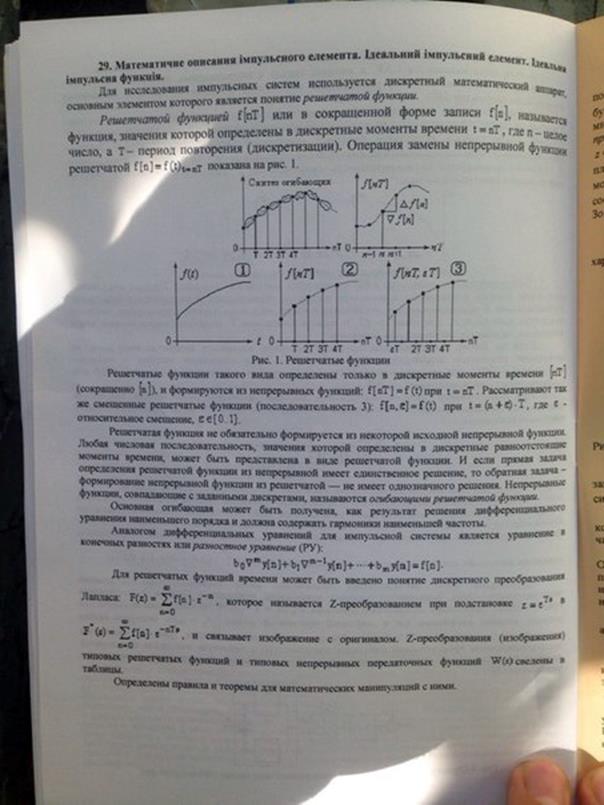
| 1. | Математичне описання імпульсного елемента. Ідеальний імпульсний елемент. Ідеальна імпульсна функція. |
| 2. | Регулювання кутової швидкості асинхронного двигуна переключенням обмотки статора з «трикутника» на «дві зірки». |
Найбільш часто на практиці зустрічаються дві схеми перемикання обмотки статора багатошвидкісних АД: 1) з трикутника (Д) на подвійну зірку (УУ), 2) з зірки (У) на подвійну зірку (УУ)..
Розглянемо схеми з'єднання статора 'і механічні характеристики АД для цих випадків.
Трикутник - подвійна зірка. Для отримання більшої кількості пар полюсів р ^ секції кожної фази статора включені в трикутник згідно, тобто так, як це показано на рис. 2а, де А 1н і A 2н - початку відповідно першої та другої секцій фази A; А 1к і A 2к - їх кінці. Позначення для висновків секцій фаз В і С, схеми включення яких аналогічні схемам фази A, опущені. З'єднання секцій за схемою рис.2 б, як зазначалося вище, викличе зменшення в 2 рази числа пар полюсів АТ. Схема рис. 2б, отримала назву подвійної зірки.
Для отримання загального вигляду механічних характеристик визначимо допустиму потужність АД при включенні його статора за схемами рис. 2, а і б. Враховуючи, що допустимий струм в секції обмотки статора I 1доп = I 1ном залишається незмінним при перемиканні числа пар полюсів, допустиму первинну потужність визначимо:
для схеми трикутник (рис. 2, а)
 (1)
(1)
для схеми подвійна зірка (рис. 2, б)

(2)
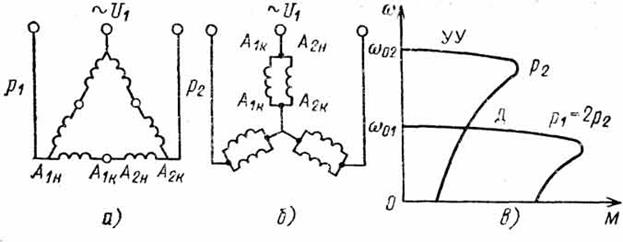
Рис. 2.
З'єднання обмоток статора в трикутник (а), подвійну зірку (б) і механічні характеристики при схемах трикутник - подвійна зірка (Д-УУ) (в)
З отриманих виразів випливає, що при cos φ1д ≈ cos φ1уу допустима потужність АТ залишається практично незмінною. Тому при збільшенні вдвічі числа пар полюсів АТ і зменшенні тим самим вдвічі синхронної швидкості допустимий момент на валу АД збільшується приблизно в 2 рази. Механічні характеристики АД для даного способу перемикання обмоток показані на рис. 2в. Вони відповідають регулювання швидкості при постійній потужності.
Зірка - подвійна зірка. У цій схемі меншою кутовий швидкості АД відповідає з'єднання обмоток статора, показане на рис. 3а. Секції фаз статора
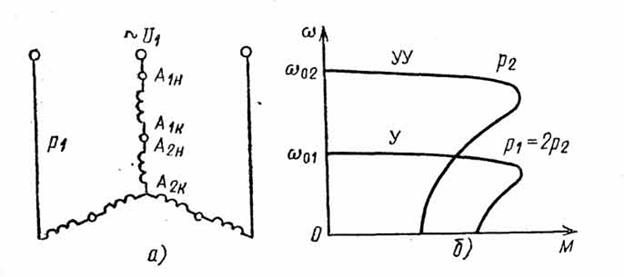
Рис. 3.
З'єднання обмоток статора в зірку (а) і механічні характеристики двигуна при схемах зірка - подвійна зірка (б) з'єднані в цій схемі також послідовно і відповідно і утворюють при підключенні до мережі АТ систему р1. пар полюсів обертового магнітного поля, якій відповідає синхронна швидкість ω 01. Переключення на подвійну зірку здійснюється за схемою на рис. 2б, при цьому число пар полюсів стане p 2 = p 1 / 2. Отримувані механічні характеристики такого двошвидкісного АТ зображені на рис. 3б,. На відміну від розглянутої вище схеми перемикання трикутник - подвійна зірка, в якій регулювання швидкості АД здійснюється при постійній потужності навантаження на його валу, в цій схемі зміна швидкості може здійснюватися при постійному моменті навантаження М с. Це випливає з розгляду виразів допустимої потужності АТ, яка для схеми подвійна зірка (рис. 4.10, б) визначається формулою (2), а для схеми зірка згідно рис. 3а - формулою
(3)
З (2) і (3) видно, що допустима потужність при перемиканні обмотки статора на менше число пар полюсів (коли швидкість АТ збільшується в 2 рази) зростає також в 2 рази. Тим самим допустимі моменти при роботі АТ в обох схемах включення приблизно однакові і характеристики мають показаний на рис. 3б вигляд.
3 Гідравлічні передаточні устрої рульових електроприводів. Кінематична схема чотирьохплунжерної рульової машини.
Увеличение водоизмещения и скорости судов требует увеличения моментов на бал
лере рулей. Значения моментов для больших современных судов измеряется тысячами и десятками тысяч килоньютоно метров (кН*М). Например, на японских сепертанкерах дедвейтом 500 тыс. т максимальный момент на баллере достигает 10 000 кН*м.
При таких значениях моментов механические (секторные) передачи становятся громоздкими и неэффективными из-за значительных затрат энергии.
Поэтому на современных судах применяют гидравлические рулевые машины, которым присущи следующие достоинства:
1. возможность получения практически неограниченных моментов на баллере;
2. плавное и точное регулирования привода;
3. малые вес и размеры.
Эти достоинства позволили разработать гидравлические рулевые машины с не-
большими моментами на баллере и тем самым вытеснить механические рулевые маши-
ны.
Промышленность выпускает гидравлические рулевые машины в виде типизирован-
ного ряда с номерами Р01-Р36, причем рулевые машины типов Р01…Р10 имеют насосы постоянной подачи, а остальные рулевые машины – насосы регулируемой подачи (табли
ца 10.1.).
Таблица 10.1.








