 2020-01-14
2020-01-14 306
306
Исследование САУ с комбинированным
Управлением
Цель работы: на основе математического моделирования оценить возможности САУ с комбинированным способом управления.
Задание на лабораторную работу: для привода руки робота используется реверсивный, замкнутый по скорости электропривод постоянного тока по системе ТП-ДПТ. Регулирование скорости двигателя постоянного тока (ДПТ) осуществляется изменением напряжения на якоре. Плавный разгон до номинальной скорости осуществляется с использованием задатчика интенсивности. Для компенсации скоростной ошибки применено комбинированное управление с передаточной функцией Wку (p)=b, охватывающее промежуточный усилитель Ку и регулятор скорости. Структурная схема изображена на рис. 2.
Передаточные функции двигателя и тиристорного преобразователя принять в виде:
Wтп(р)=Ктп/(Tтпр +1); Wдпт(р)=w(р)/Uд (р)=Кд/(TяTмр2 + Тмр +1);
Wдпт(р)=w(р)/Мс (р)= - Rя(Tяр +1) /(СеФ)2 (TяTмр2 + Тмр +1).
Структурная схема электропривода
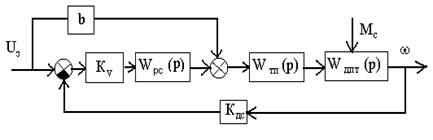 Рис.2
Рис.2
Требуется:
1. Рассчитать величину Кдс, чтобы напряжение задания Uз для получения номинальной скорости не превышало 10В;
2. Настроить электропривод на модульный (технический) оптимум с использованием ПИ- или ПИД-регулятора. Построить л.а.х. и л.ф.х. разомкнутой скорректированной системы. Рассчитать параметры регулятора;
3. Рассчитать коэффициент компенсации b, обеспечивающий астатизм второго порядка по управлению;
4. Рассчитать величину постоянной заводки задатчика интенсивности, позволяющего плавно разгонять нагруженный электропривод с максимально-допустимым динамическим моментом. При этом принять Мс=Мн.;
5. Определить установившееся значение скоростной ошибки, если момент нагрузки изменяется по закону Мс= 2´t;
6. Разработать математическую модель системы и, используя любой математический пакет прикладных программ, составить схему для исследования;
7. Провести экспериментальные исследования с использованием ЭВМ по п.п. 1¸5.








