 2020-01-14
2020-01-14 263
263Параметры тиристорного преобразователя и элемента сравнения: Ктп = 8; Tтп=0,002; Ку= 4; двигатель выбирается согласно № по списку группы (см.Таблицу 3);
Таблица 3
Технические данные электродвигателей постоянного тока
| № Варианта (по списку в журнале гр.)
|
Тип двигателя
| Мощность РД НОМ, кВт | Напряжение UН, В | Скорость вращения nН, об/мин | Ток IН, А | К. П. Д. h, % | Маховый момент GD2, кГ× м2 | Сопротивление обмоток при 20° С, Ом
| Число главных полюсов 2р | |||
| Якоря rа, Ом | Добавочных полюсов rдп, Ом | Последовательного возбуждения или компенсационной rК, Ом | ||||||||||
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | |
| 1 ДП-21
| 4,5 | 220 | 1050 | 26 | 78,5 | 0,5 | 0,66 | 0,28 | — | 4 | ||
| 2 ДП-22
| 6 | 220 | 1130 | 33 | 82,5 | 8,62 | 0,37 | 0,196 | — | 4 | ||
| 3 ДП-31
| 8,5 | 220 | 870 | 47 | 82,5 | 1,2 | 0,325 | 0,098 | — | 4 | ||
| 4 ДП-32
| 12 | 220 | 790 | 65 | 84 | 1,7 | 0,19 | 0,076 | — | 4 | ||
| 5 ДП-41
| 16 | 220 | 710 | 85 | 86 | 3,2 | 0,11 | 0,057 | — | 4 | ||
| 6 ДП-42
| 21 | 220 | 660 | 110 | 83 | 4,2 | 0,0725 | 0,043 | — | 4 | ||
| 7 ДП-42
| 29 | 440 | 1040 | 75 | 84 | 4,2 | 0,132 | 0,08 | — | 4 | ||
| 8 ДП-52
| 32 | 220 | 760 | 164 | 86 | 7,5 | 0,033 | 0,0215 | — | 4 | ||
| 9 П42
| 4,5 | 220 | 1500 | 25,4 | 90,5 | 0,18 | 0,545 | 0,235 | 0,0392 | 4 | ||
| 10 П51
| 6 | 220 | 1500 | 33,2 | 82 | 0,35 | 0,34 | 0,132 | 0,00736 | 4 | ||
| 11 П52
| 8 | 220 | 1500 | 43,5 | 84 | 0,4 | 0,185 | 0,084 | 0,0068 | 4 | ||
| 12 П61
| 11 | 220 | 1500 | 59,5 | 84 | 0,56 | 0,135 | 0,052 | 0,006 | 4 | ||
| 13 П62
| 14 | 220 | 1500 | 73,5 | 86,5 | 0,65 | 0,0875 | 0,04 | 0,004 | 4 | ||
| 14 П71
| 19 | 110 | 1500 | 210 | 82,5 | 1,4 | 0,0234 | 0,0079 | 0,00098 | 4 | ||
| 15 П71
| 19 | 220 | 1500 | 103 | 84 | 1,4 | 0,0912 | 0,0323 | 0,00486 | 4 | ||
| 16 П72
| 25 | 220 | 1500 | 132 | 86 | 1,6 | 0,0585 | 0,024 | 0,00432 | 4 | ||
| 17 П81
| 32 | 220 | 1500 | 116 | 87,5 | 2,7 | 0,057 | 0,018 | 0,0026 | 4 | ||
| 18 П82
| 25 | 440 | 1000 | 66 | 85,5 | 3,1 | 0,27 | 0,0948 | 0,00796 | 4 | ||
| 19 П82
| 42 | 220 | 1500 | 218 | 87,5 | 3,1 | 0,0263 | 0,00957 | 0,00079 | 4 | ||
| 20 П82
| 42 | 440 | 1500 | 107 | 89 | 3,1 | 0,105 | 0,0383 | 0,00216 | 4 | ||
| 21 П91
| 25 | 110 | 750 | 279 | 81,5 | 5,9 | 0,01875 | 0,0069 | 0,00102 | 4 | ||
| 22 П91
| 55 | 440 | 1500 | 143 | 87,5 | 5,9 | 0,0748 | 0,0275 | 0,00407 | 4 | ||
| 23 П92
| 42 | 440 | 1000 | 110 | 87 | 7,0 | 0,161 | 0,0544 | 0,0048 | 4 | ||
| 24 П101
| 42 | 110 | 750 | 446 | 85,5 | 10,3 | 0,00864 | 0,00323 | 0,00034 | 4 | ||
|
| ||||||||||||
| Продолжение табл. | ||||||||||||
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | |
| 25 П20-30-7К
| 1750 | 630 | 330 | 2970 | 93,5 | 13600 | 0,00396 | 0,000429 | 0,00258 | 8 | ||
| 26 П19-50-7к
| 1750 | 630 | 370 | 2950 | 94,2 | 12500 | 0,00332 | 0,000517 | 0,00188 | 8 | ||
| 27 П19-50-7к
| 2100 | 750 | 350 | 2970 | 94,1 | 14000 | 0,00389 | 0,000607 | 0,00201 | 8 | ||
| 28 П20-40-7к
| 2400 | 860 | 350 | 2970 | 94,1 | 16100 | 0,00428 | 0,00052 | 0,00276 | 8 | ||
| 29 П19-45-7к
| 2400 | 860 | 450 | 2950 | 94,6 | 14500 | 0,00345 | 0,000563 | 0,001945 | 8 | ||
| 30 П20-35-7к
| 2800 | 1000 | 450 | 2965 | 94,4 | 14 900 | 0,00411 | 0,000475 | 0,00267 | 8 | ||
| 31 П20-30-7К
| 2800 | 1000 | 530 | 2960 | 94,5 | 13600 | 0,00396 | 0,000429 | 0,00258 | 8 | ||
| 32 П21-35-5к
| 3300 | 630 | 310 | 5540 | 94,2 | 30120 | 0,00138 | 0,000174 | 0,001027 | 10 | ||
| 33 П21-35-5к
| 4000 | 750 | 370 | 5620 | 95 | 30120 | 0,00138 | 0,000174 | 0,001027 | 10 | ||
Примечание: для всех двигателей перегрузочная способность
l=Iдоп/Iн равна 2,4; LЯ=5.5 Uн/2pnнIн –индуктивность якоря.
Расчетные формулы для определения параметров системы управления следующие:
СеФ =  , где: Rя = ra + rдп, wн= pnн/30;
, где: Rя = ra + rдп, wн= pnн/30;
Kд =  ; Тя =
; Тя =  ; Тм =
; Тм =  , где:
, где:  .
.
1. Принимая во внимание, что САУ электроприводом с применением ПИД- или ПИ- регулятора будет астатической, то требуемое значение коэффициента усиления датчика скорости Кдс можно найти по формуле:
 Uз = 10 = Кдс wн Кдс = 10/ wн.
Uз = 10 = Кдс wн Кдс = 10/ wн.
2. При настройке системы на модульный оптимум не скомпенсированной малой постоянной времени будет Tтп. При этом передаточную функцию регулятора скорости следует принять в виде: Wрс(р)= (TяTмр2 + Тмр +1)/ Ти р.
Тогда передаточная функция разомкнутой скорректированной
системы будет иметь вид:

 ,
,
Откуда определяется величина Ти регулятора скорости. Структурная схема ПИД-регулятора приведена ниже.
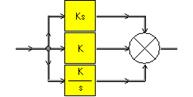
где: ks = (TяТм/Ти)s, K=Тм/Ти, К/s = 1/Тиs – параметры ПИД-регулятора.
3. Коэффициент компенсации b, обеспечивающий астатизм второго порядка по управлению, можно определить в соответствии с выражением: 1 – b ктпкдкдс=0.
В этом случае из числителя передаточной функции по ошибке от управляющего воздействия можно вынести оператор Р, что соответствует повышению порядка астатизма на 1.
4. Величину постоянной заводки задатчика интенсивности, позволяющего плавно разгонять нагруженный электропривод с максимально-допустимым динамическим моментом можно рассчитать из основного уравнения движения:
Мд - Мс = Jд dw/dt, где: Мд = lIн (СмФ); Мс = Iн (СмФ); (СмФ)=(СеФ); dw=wн.
Тогда dt = tпуска.
 Uз
Uз
10
tпуска t
5. Для определения скоростной ошибки по моменту нагрузки необходимо взять передаточную функцию по ошибке от возмущающего воздействия без учета компенсирующего устройства по управляющему воздействию.
6. Смоделировать САУ с применением пакета SyAn и провести экспериментальные исследования для подтверждения расчетов по пунктам 1¸5.
Модель двигателя постоянного тока в зависимости от соотношения постоянных времени якорной цепи представляется или колебательным звеном, или апериодическим 2-го порядка, т.е.:
Wдпт(р)=w(р)/Uд (р)=Кд/(TяTмр2 + Тмр +1)=Кд/(Т1р + 1)(Т2р + 1) если 4Тя <Тм;

Wдпт(р)=w(р)/Uд (р)=Кд/(TяTмр2 + Тмр +1)=Кд/(Т2р2 + 2xТр + 1) если 4Тя >Тм,
 где:
где:  ,
,  - параметры колебательного звена.
- параметры колебательного звена.
Структурная схема ДПТ для исследования влияния нагрузки может быть представлена в виде (для случая 4Тя >Тм):
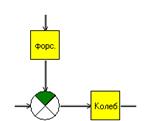 где форс. - Rя(Tяр +1) /(СеФ).
где форс. - Rя(Tяр +1) /(СеФ).
В отчете по лабораторной работе должны быть представлены л.ч.х. и графики переходных процессов по управлению и возмущению в скорректированной комбинированной системе.








