 2020-01-14
2020-01-14 295
295Параметры объекта и регулятора задаются преподавателем.
Основными показателями качества процессов поиска релейных одномерных экстремальных систем являются: время поиска экстремума, амплитуда и период колебаний, потери на поиск экстремума. Эти системы характеризуются наличием поисковых колебаний («рысканий») около экстремума. Из рис. 7,а устанавливаем, что при постоянной скорости изменения входной переменной в интервале 0.5Т*i £ t£ Т*i
X* =±K1t, где K1= tg a.
|
|
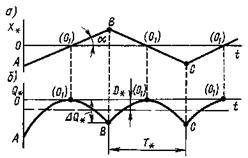
Диаграмма «рыскания»
Рис. 7
Период Т*i «рысканий» системы определяется моментом переключения реле рис. 2,б. Тогда отклонение экстремального параметра на одном участке периода:
Q* = - K K12 t2.
Скорость изменения этого отклонения на участках между переключениями 0.5Т*i £ t£ Т*i определяется производной
dQ*/dt = - 2K K12 t.
Среднее за период поиска «рыскания» значение отклонения экстремального параметра называют потерей на поиск (см. рис.7,б):
D* =-K(K1T*i)2/12.
Амплитуда колебаний экстремального параметра получается подстановкой (см. рис.7,б) t = 0,5 T*i:
DQ* = - 0.25 K (K1 Т*i)2,
т.е. амплитуда «рысканий» в три раза больше потерь на «рыскание»:
DQ* = 3 D*.
Амплитуда колебаний и потери на поиск зависят от формы экстремальной характеристики и нелинейно зависят от периода колебаний.
Чтобы улучшить качество работы экстремальных систем, необходимо повысить их быстродействие (уменьшить время выхода на экстремум после смещения характеристики объекта), уменьшить амплитуду автоколебаний и снизить потери на поиск. Для этого применяют известные методы коррекции автоматических систем. Специфика экстремальных систем, имеющих нелинейные звенья, обусловливает сложность задач синтеза корректирующих устройств.
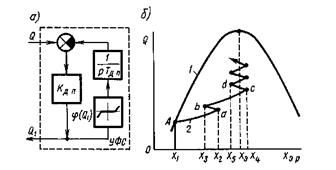
В ряде случаев для улучшения качества работы экстремальных систем используют инженерные рекомендации [7]. Например, для уменьшения времени поиска в системах с запоминанием экстремума и с коммутатором (см. рис. 8) А. П. Юркевич предложил применять динамический преобразователь входного сигнала экстремального регулятора в виде реального дифференцирующего звена, который выполняет роль последовательного корректирующего устройства, включаемого между выходом одномерного объекта (О) и экстремальным регулятором (ЭР) — рис. 8, а.
Динамический преобразователь
| |

Рис. 8
Структура динамического преобразователя (ДП) представлена в виде безынерционного звена, охваченного отрицательной обратной связью, содержащей идеальный интегратор [9]:
Wдп(р) = Кдп /(1+ Кдп /р Tдп),
где Кдп и Тдп - коэффициент передачи и постоянная времени динамического преобразователя.
Рассмотрим процесс поиска экстремума системы с запоминанием экстремума и динамическим преобразователем (рис. 8,6). Пусть начальная точка работы экстремальной системы после смещения характеристики Q(Xэр) соответствует точке Ана кривой 1. В результате действия ЭРсигнал Xэр будет увеличиваться и при величине Х2 значение Q1 = Q (точка а). Затем, после того как Q2 станет больше Q, сигнал Q1 начнет уменьшаться. Это вызовет срабатывание ЭРпри значении сигнала Хэр = Х3(точка b), осуществляющего «ложный» реверс. Далее уменьшается сигнал Хэр до величины Х4, когда снова произойдет реверс ЭР (точка с). При значении Х5осуществляется последующий «ложный» реверс ЭР(точка d) и т. д. Введение ложных реверсов ускоряет движение к экстремуму (см. кривую 2 на рис. 8, б). Если характеристика Q (Хэр) дрейфует, то в результате действия ДП и ЭРсистема следит за смещением экстремума. Чем меньше инерционность объекта О, тем эффективнее действие ДП.
Для улучшения процессов поиска экстремума инерционных объектов высокого порядка, а также нейтральных и неустойчивых объектов В. В. Казакевичем предложен быстродействующий экстремальный регулятор — ЭРБ[7], в котором осуществляется поиск экстремума по максимуму производной (dQ/dt)max, реализуемый с помощью устройства формирования входного сигнала — УФС (рис. 9, а), представляющего собой автоматический компенсатор. Скорость компенсации при этом настраивается соответственно свойствам объекта.
В отличие от динамического преобразователя УФСимеет нелинейную обратную связь (реверсивный двигатель автоматического компенсатора). На линейных участках характеристики j (Q1) структурная схема УФСэквивалентна структурной схеме ДП. В пределах зоны нечувствительности характеристики j (Q1) сигнал производной dQ/dt = 0.
|
|
Устройство формирования сигнала
Рис.9
Это означает, что при медленном изменении сигнала Q(при медленном смещении Q (X)и при малом наклоне характеристики Q (X) вблизи экстремума) на вход экстремального регулятора будет поступать сигнал, пропорциональный параметру Q, безего производной. Следовательно, ЭРБ обеспечивает слежение за экстремумом при медленном изменении Q и форсированно выводит объект в область экстремума при быстром смещении характеристики Q (X).
Рассмотрим процесс поиска экстремума системы с ЭРБ и коммутатором. Пусть начальная точка работы экстремальной системы после смещения характеристики Q (Хэр) соответствует точке А на кривой 1 (рис. 9, б). В результате действия коммутатора и УФС при значении X 2 происходит ложный реверс (точка a), а при значении Хз - последующий реверс от действия УФС (точка b). При значении Хэр = = Хэ производная dQ/dt достигает максимума. После того как Q2 станет больше нуля, сигнал Q1 уменьшится и при Хэр = Х4 ЭРБ произведет ложный реверс (точка c). Затем при Х5 произойдет реверс от действия УФС (точка d) и т. д. Система форсированно выводит объект в область экстремума (кривая 2 на рис. 9, б). Вблизи экстремума при малой величине dQ/dt система перейдет на поиск экстремума по параметру Q.
В процессе форсированного поиска система с ЭРБ не переходит на противоположную ветвь характеристики Q (Хэр), поэтому время поиска для инерционных объектов по сравнению с регуляторами без ЭРБ уменьшается на порядок без ухудшения качества установившихся режимов.
Рассмотренные основные методы улучшения качества работы экстремальных систем применяются при разработке как одномерных, так и многомерных систем.
На Рис.10 представлена одна из возможных моделей экстремальной САУ без УФС и ДП.
Модель экстремальной САУ

Рис.10
В отчете по лабораторной работе привести как временные так и фазовые характеристики поиска экстремума. Кроме того в выводах по работе должен содержаться сравнительный анализ влияния на показатели работы экстремальной системы ее параметров и методов поиска.
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
1. Советов, Б.Я. Моделирование систем: Учеб. для вузов – 3-е изд.,перераб. и доп./Б.Я.Советов, С.А.Яковлев. – М.: Высш. шк., 2001. –343 с.: ил.
2. Веников, В.А. Теория подобия и моделирование/ В.А. Веников, Г.В.Веников. – М.: Высш. шк., 1984. –243 с.: ил.
3. Коршунов, Ю.М. Математические основы кибернетики: Учеб. пособие для вузов/Ю.М.Коршунов. - М.: Энергоатомиздат, 1987.- 496 с.: ил.
4. Бусленко, Н.П. Моделирование сложных систем/Н.П.Бусленко.-М.: Наука, 1978.-399 с.: ил.
5. Справочник проектировщика АСУ ТП/ Г.Л.Смилянский, Л.З.Амлинский, В.Я.Баранов и др.; Под ред. Г.Л.Смилянского.-М.:Машиностроение, 1983.-527 с.: ил.
6. Шеридан, Т.Б. Системы человек – машина. Модели информации, управления и принятия решений человеком – оператором: Пер. с англ./Т.Б. Шеридан, У.Р.Феррелл. - М.: Машиностроение, 1980. - 400 с.: ил.
7. Казакевич, В.В. Системы автоматической оптимизации /В.В.
Казакевич, А.Б. Родов.- М.: Энергия, 1977.- 384 с.: ил.
8. Иващенко, Н.Н. Автоматическое регулирование/Н.Н.Иващенко. - М.: Машиностроение, 1978. - 609 с.: ил.
9. Куропаткин, П.В. Оптимальные и адаптивные системы/П.В.Куропаткин. –М.: Высш. шк., 1980. –288 с.
10.Топчеев, Ю.И. Атлас для проектирования систем автоматического регулирования/Ю.И.Топчеев. - М.: Машиностроение, 1989. - 752 с.: ил.
11.Сю, Д. Современная теория автоматического управления и ее применение: Пер. с англ./Д.Сю, А.Мейер. -М.: Машиностроение, 1972. –552 с.: ил.
12. Официальный сайт МИРЕА. Режим доступа:
http://www.cpd.mirea.ru/
СОДЕРЖАНИЕ
Стр
1. Исследование системы с нечетким управлением….…...3








